摘 要:文 章设计了一种基于单片机的超声波倒车雷达系统,以 AT89C51 型单片机作为控制核心,集距离测量、显示,方位显示和危险报警于一体,以提高驾驶者在倒车泊车时的安全性和舒适性。本设计采用 Keil 软件对系统程序进行调试,并采用 Proteus 对整个系统进行了仿真,仿真结果达到了预期的效果。
关键词:超声波;测距;单片机;倒车雷达
前言
近年来,随着驾驶人和机动车数量的急剧增长,行车路况复杂,驾驶员往往不能及时的了解车辆周边尤其是后方的环境,导致驾驶员操作不及时,造成很多事故 。本文设计了以 AT89C51 单片机为核心,利用超声波来进行测距,同时具有实现显示和报警功能的倒车雷达系统,大大提高了倒车泊车的安全性。
1 系统总体设计
本文设计了一种基于单片机的超声波倒车雷达系统,采用超声波脉冲回波法对距离进行测量,AT89C51 单片机作为整个系统的控制单元,TCF40-16TRC 超声波收发一体式传感器作为测距装置。系统主要包括测距部分、控制部分和显示报警部分。图 1 所示为系统的整体框架图。
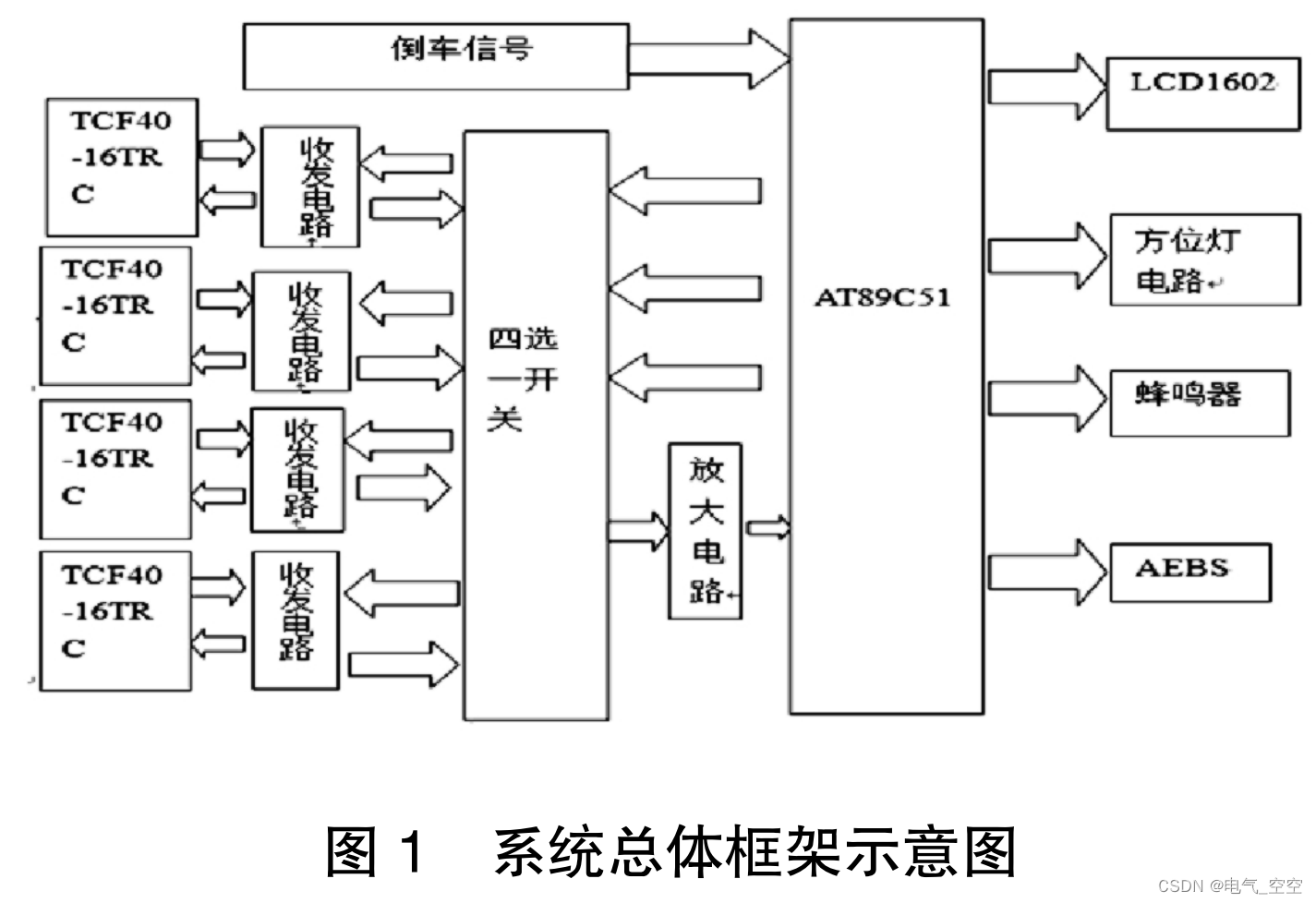
汽车泊车时挂倒档,整车 ECU 会产生倒车信号,单片机接收该信号后进入工作状态,产生脉冲电压信号,该信号经 过四选一分时选通开关被发送到第一路(后左支路)测距电路,经过电路放大后驱动传感器发射超声波,同时单片机开始计时。超声波遇到障碍物后产生的反射回波被超声波接收
传感器所接收,并将其转化为电信号,单片机收到信号后,响应该中断,系统会执行外部中断程序,停止先前的计时,控制器会得到超声波发射和回波之间的时间差,定时中断以后继续执行下一路。测距顺序依次为后左,后左中,后右中和后右。随后,控制器计算得到最小距离值,并将该值及方位传送给 LCD 。当该值小于所设定的安全距离时,单片机驱动蜂鸣器发出报警,同时 AEB 系统进入工作状态,以保证泊车安全。
2 系统硬件设计
AT89C51 单片机是一种低功耗和高性能的八位芯片 。硬件电路主要包括单片机控制电路,超声波测距收发电路,回波电信号放大电路,LCD 显示电路,报警电路,方位灯显示电路等。
2.1 超声波测距收发电路
超声波收发电路的功能主要有:增大驱动发射声波脉冲电压幅值,实现声波信号与电信号之间的转化;提高超声波有效发射距离。本系统选择 CD4052 型芯片用来分时选通四个支路的传感器。
2.2 回波电信号放大电路设计
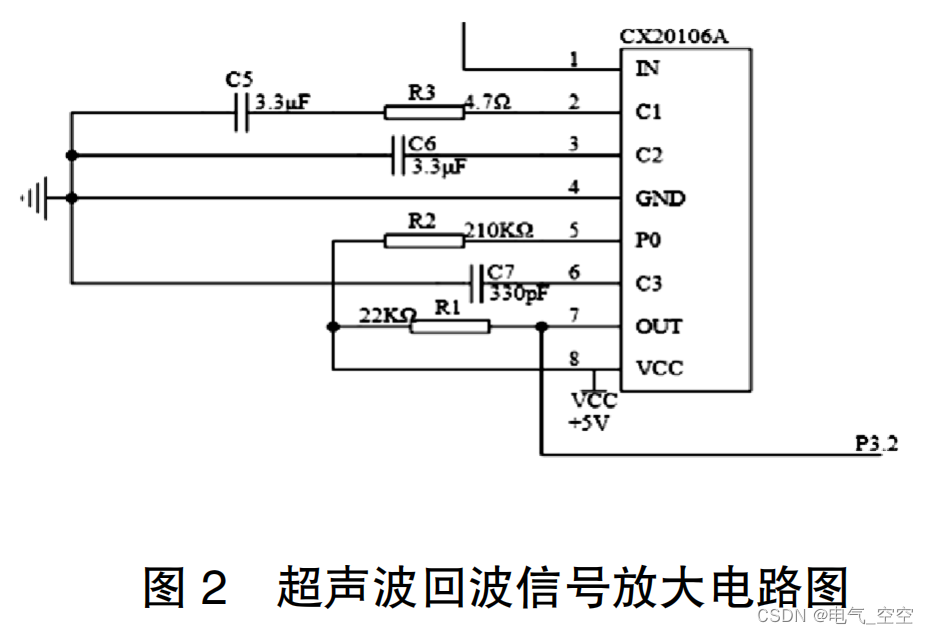
放大电路选择 CX20106A 型芯片作为控制核心。图 2 中引脚 1 接 CD4052 芯片的 Y 端。该放大电路对回波电信号进行处理,最终产生并向单片机输出一个低电平信号 。该信号会向控制芯片申请中断,随即单片机发送计时停止指令,同时系统便开始对数据进行处理。
2.3 液晶显示系统的电路设计
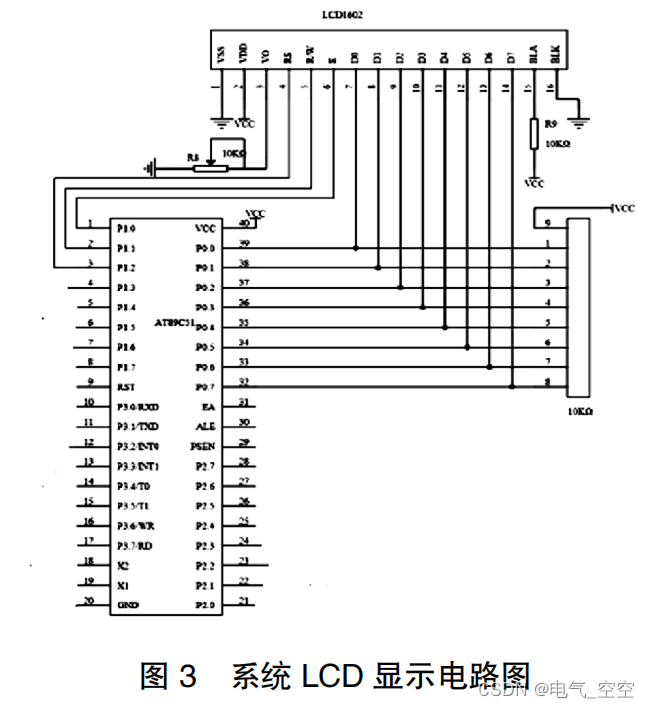
本设计选择 YBLCD1602LCD 液晶显示器作为显示装置。图 3 中芯片 P0 的八个引脚端口分别与 LCD 的八个引脚相连接,传输指令和数据。P1.0 、 P1.1 和 P1.2 引脚分别与LCD 的三个端口相连接,对 LCD 的读写功能进行控制。
2.4 系统方位灯电路设计
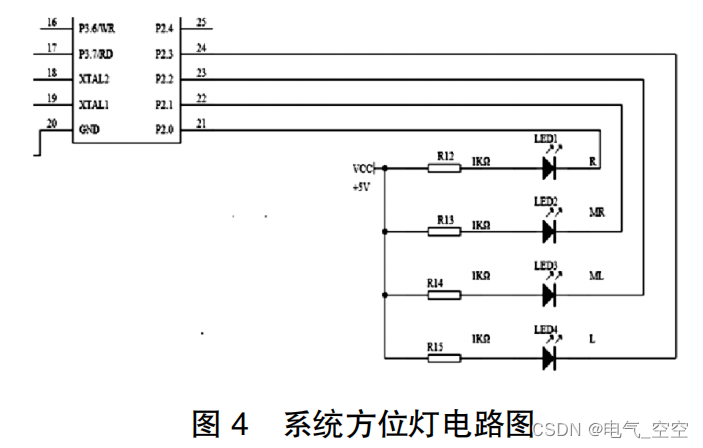
图 4 所示为系统方位灯的电路图,当其中一个二极管点亮,表明该路传感器对应方位的障碍物距离车体的位置最近。这四个发光二极管分别与芯片的引脚相连,当芯片所对应引脚输出为低电平时,该引脚所对应的二极管被点亮。
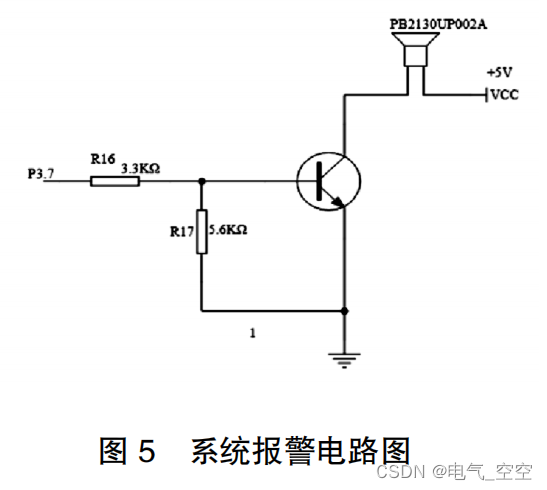
2.5 系统报警电路设计
系统采用 PB2130UP002A 蜂鸣器作为声音报警装置,当障碍物与车体距离过近时,蜂鸣器发出声音以起到报警的作用 。由图 5 可知该电路是利用一个三级管来驱动,蜂鸣器电路与单片机的 P3.7 引脚相连接。
3 系统软件设计
系统软件部分由运行主程序,超声波收发子程序,发射 通道选通子程序,LCD 显示子程序,报警子程序等组成。
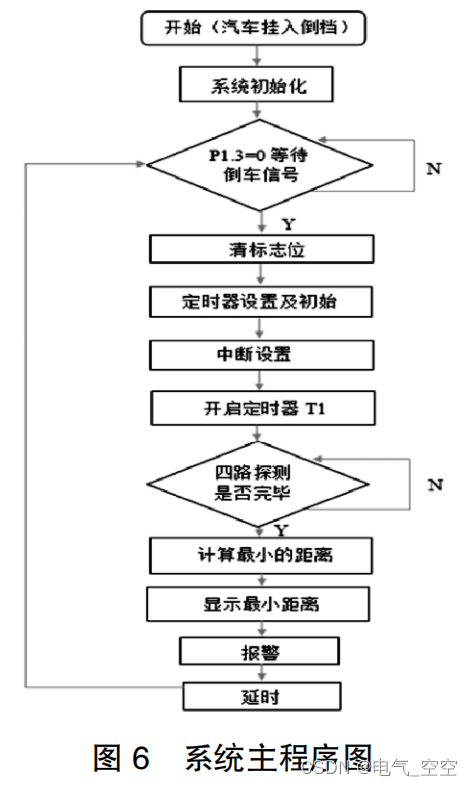
3.1 软件主程序设计
图 6 所示为主程序流程框图,汽车挂入倒档时,系统进入工作状态。首先对每个缓冲单元清零,对液晶显示器进行初始化 。随后,系统开始检测是否有倒车信号传来,若有超声波测距支路便开始进入工作状态,反之继续等待。设置定时器并赋初值,同时 T1 定时器开中断。单片机通过检测四路探测完毕的标志位来判断四路探测是否完毕, 标志位为 1 则表示都已经完成,对数据进行处理,完成后通过 LCD 显示最小距离,同时报警模块判断是否需要报警,延迟大约 0.5s 后,系统又回到检测倒车信号处开始下一轮的循环。
3.2 超声波收发子程序设计
单片机接收超声回波的信号,系统进入外部中断 0 程序。此时,定时器 T0 首先停止计时,禁止外部中断 0 的中断,然后计数值保存在以 40H 为起始的单元中。随后,系统等待定时器 T1 所设定的 40ms 中断产生,一旦产生,便会继续进行下一支路的测距。
3.3 定时器 T1 中断程序设计
系统进入定时器 T1 中断程序, T1 关闭,外部 0 中断被禁止,同时 T1 被重新赋初值。如果全部选通完毕且有四个计数值,系统会置标志位然后比较这四个值返回主程序。如果四通路还没有全部选通,系统会继续选通还没有被选通的通道,同时调用发射超声波的子程序,启动定时器 T0 和定时器 T1 ,并允许定时器 T1 中断。
4 系统调试与仿真
本文使用 Keil 软件对程序进行调试,使用 Proteus 软件对电路进行仿真。图 7 中,示波器窗口可以看见有一串矩形波发出,脉冲个数为 16 个,与预期的数目相同。
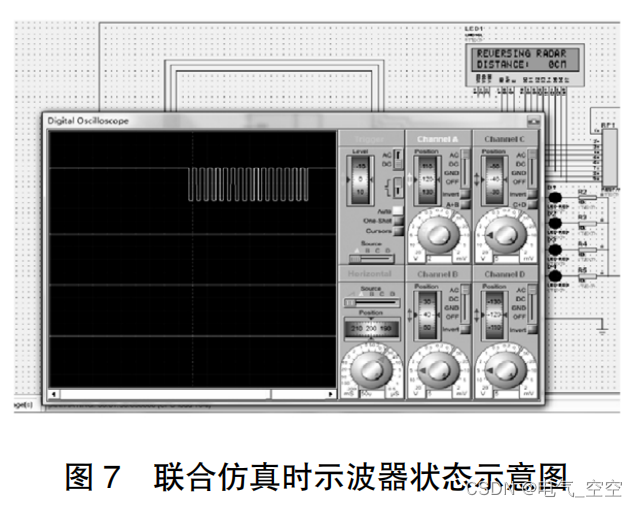
利用 Keil 软件对系统的程序进行了调试并采用 Proteus专业仿真软件对整个系统进行了仿真以验证系统的正确性和稳定性。
5 结语
本文通过采用单片机控制和超声波测距,设计出一种结构简单、可靠性高的泊车雷达系统。利用超声波来进行测距,测量精度比较高,同时实现显示和报警的功能,完全满足驾驶员泊车的需求。