🎬 秋野酱:《个人主页》
🔥 个人专栏:《Java专栏》《Python专栏》
⛺️心若有所向往,何惧道阻且长
文章目录
按键点灯一
● 按下按键,LED1亮
● 抬起按键,LED1灭
开发流程
- GPIO初始化
- 按键扫描,按下点灯,抬起灭灯
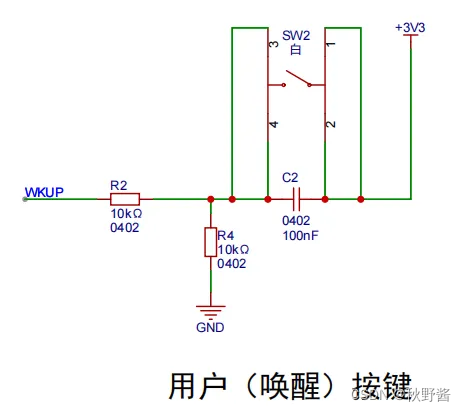
输入状态 - 默认状态:由电路图决定了,当前按键默认接地,因此默认为低电平。
- 按下按键:3V3导通,输入变为高电平
GPIO初始化,需要考虑到当前引脚的初始状态,初始化配置为不上拉也不下拉。
因此,抬起时,默认为低电平;按下时,为高电平。
实现逻辑
csharp
/********************* PA0 按键引脚 *********************/
// 时钟初始化
rcu_periph_clock_enable(RCU_GPIOA);
// 配置GPIO模式
gpio_mode_set(GPIOA, GPIO_MODE_INPUT, GPIO_PUPD_NONE, GPIO_PIN_0);
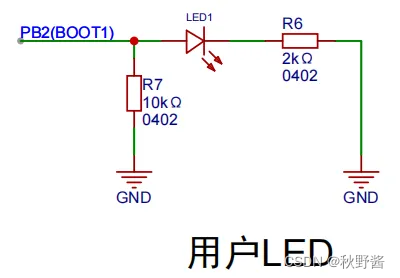
/********************* PB2 LED1引脚 *********************/
// 1. 时钟初始化
rcu_periph_clock_enable(RCU_GPIOB);
// 2. 配置GPIO 输入输出模式
gpio_mode_set(GPIOB, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE, GPIO_PIN_2);
// 3. 配置GPIO 模式的操作方式
gpio_output_options_set(GPIOB, GPIO_OTYPE_PP, GPIO_OSPEED_2MHZ, GPIO_PIN_2);
csharp
FlagStatus pre_state = RESET;// 默认低电平抬起
while(1) {
FlagStatus state = gpio_input_bit_get(GPIOA, GPIO_PIN_0);
if (state != pre_state){
if(state == SET){ // 当前高电平, 上一次为低电平,按下开灯
gpio_bit_set(GPIOB, GPIO_PIN_2);
}else { // 当前低电平, 上一次为高电平,抬起关灯
gpio_bit_reset(GPIOB, GPIO_PIN_2);
}
pre_state = state;
}
}按键点灯二
● 按下按键PC0,LED1亮
● 抬起按键PC0,LED1灭
开发流程
- GPIO初始化
- 按键扫描,按下点灯,抬起灭灯
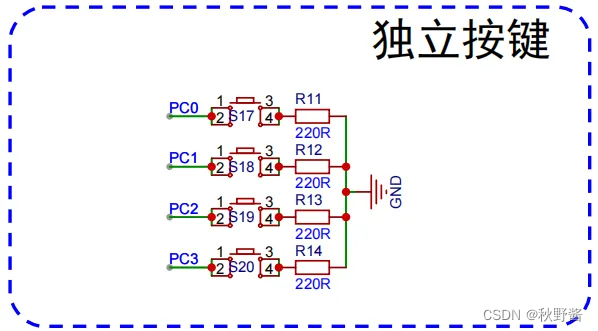
输入状态 - 默认状态:由电路图决定,当前按键通过开关接地,因此默认什么都没有接,默认状态不确定。
- 按下按键,开关导通接地,输入变为低电平
GPIO初始化,需要考虑到当前引脚的初始状态,初始化配置为上拉,给一个默认的状态。
因此,抬起时,默认为高电平;按下时,为低电平。
实现逻辑
csharp
/********************* PC0 按键引脚 *********************/
// 时钟初始化
rcu_periph_clock_enable(RCU_GPIOC);
// 配置GPIO模式
gpio_mode_set(GPIOC, GPIO_MODE_INPUT, GPIO_PUPD_PULLUP, GPIO_PIN_0);
/********************* PB2 LED1引脚 *********************/
// 1. 时钟初始化
rcu_periph_clock_enable(RCU_GPIOB);
// 2. 配置GPIO 输入输出模式
gpio_mode_set(GPIOB, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE, GPIO_PIN_2);
// 3. 配置GPIO 模式的操作方式
gpio_output_options_set(GPIOB, GPIO_OTYPE_PP, GPIO_OSPEED_2MHZ, GPIO_PIN_2);
// 初始化为低电平
gpio_bit_reset(GPIOB, GPIO_PIN_2);
csharp
FlagStatus pre_state = SET;// 默认高电平抬起
while(1) {
FlagStatus state = gpio_input_bit_get(GPIOC, GPIO_PIN_0);
if (state != pre_state){
if(state == SET){ // 当前高电平, 上一次为低电平,抬起关灯
gpio_bit_reset(GPIOB, GPIO_PIN_2);
}else { // 当前低电平, 上一次为高电平,按下开灯
gpio_bit_set(GPIOB, GPIO_PIN_2);
}
pre_state = state;
}
}完整代码
#include "gd32f4xx.h"
#include "systick.h"
#include <stdio.h>
/*********************
任务目标:
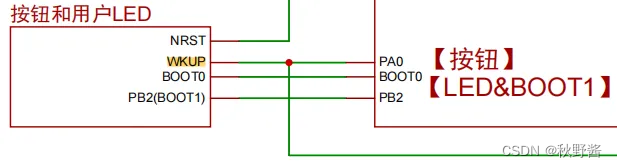
按键 PA0,PC0
LED1 PB2
● 按下按键,LED1亮
● 抬起按键,LED1灭
**********************/
void GPIO_config(void) {
/********************* PA0 按键引脚 *********************/
// 时钟初始化
rcu_periph_clock_enable(RCU_GPIOA);
// 配置GPIO模式
gpio_mode_set(GPIOA, GPIO_MODE_INPUT, GPIO_PUPD_NONE, GPIO_PIN_0);
/********************* PC0 按键引脚 *********************/
// 时钟初始化
rcu_periph_clock_enable(RCU_GPIOC);
// 配置GPIO模式
gpio_mode_set(GPIOC, GPIO_MODE_INPUT, GPIO_PUPD_PULLUP, GPIO_PIN_0);
/********************* PB2 LED1引脚 *********************/
// 1. 时钟初始化
rcu_periph_clock_enable(RCU_GPIOB);
// 2. 配置GPIO 输入输出模式
gpio_mode_set(GPIOB, GPIO_MODE_OUTPUT, GPIO_PUPD_NONE, GPIO_PIN_2);
// 3. 配置GPIO 模式的操作方式
gpio_output_options_set(GPIOB, GPIO_OTYPE_PP, GPIO_OSPEED_2MHZ, GPIO_PIN_2);
// 初始化为低电平
gpio_bit_reset(GPIOB, GPIO_PIN_2);
}
int main(void) {
// 系统滴答定时器初始化
systick_config();
// GPIO初始化
GPIO_config();
FlagStatus pre_state = RESET;// 默认低电平抬起
FlagStatus pre_state1 = RESET;// 默认低电平抬起
while(1) {
FlagStatus state = gpio_input_bit_get(GPIOA, GPIO_PIN_0);
if (state != pre_state){
if(state == SET){ // 当前高电平, 上一次为低电平,按下开灯
gpio_bit_set(GPIOB, GPIO_PIN_2);
}else { // 当前低电平, 上一次为高电平,抬起关灯
gpio_bit_reset(GPIOB, GPIO_PIN_2);
}
pre_state = state;
}
FlagStatus state1 = gpio_input_bit_get(GPIOC, GPIO_PIN_0);
if (state1 != pre_state1){
if(state1 == SET){ // 当前高电平, 上一次为低电平,抬起关灯
gpio_bit_reset(GPIOB, GPIO_PIN_2);
}else { // 当前低电平, 上一次为高电平,按下开灯
gpio_bit_set(GPIOB, GPIO_PIN_2);
}
pre_state1 = state1;
}}
}
按钮输入的接线方式
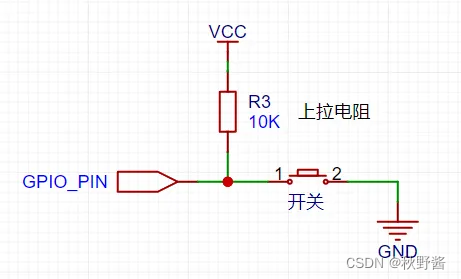
上拉电阻
IO口默认为高电平,按钮按下导通拉低
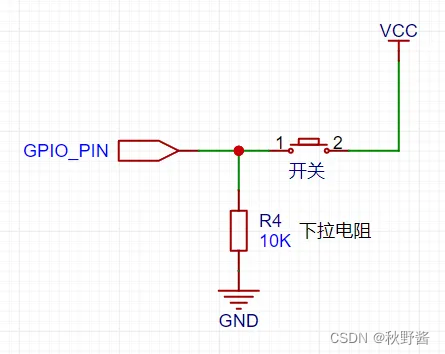
下拉电阻
IO口默认为低电平,按钮按下导通拉高
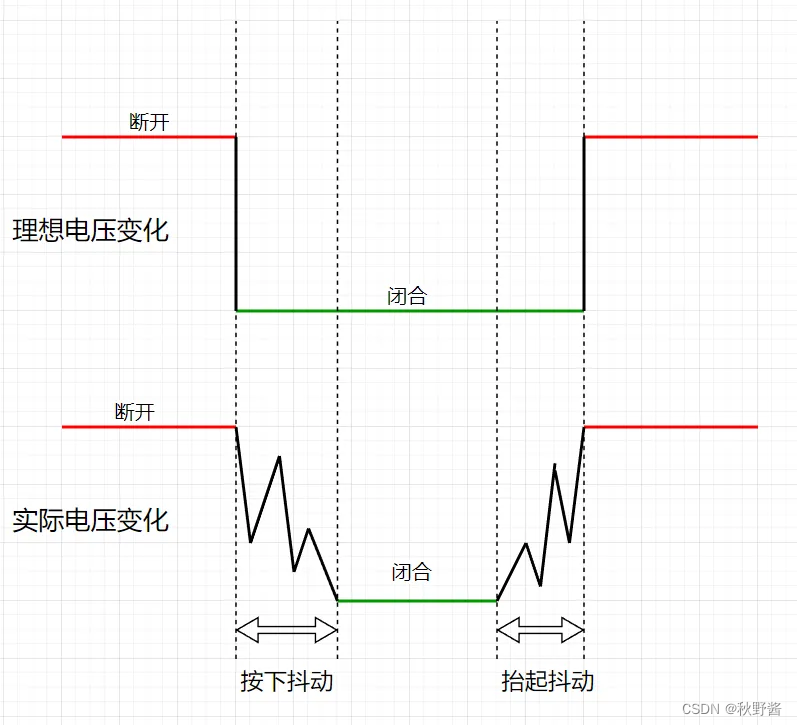
消除抖动
由于按键在按下或释放时,有机械弹性的影响,会产生一些触点的电平抖动,抖动时长与按钮本身有关,通常为5ms-10ms,如果在抖动期间检测高低电平,会导致判断错误或重复判断。我们必须进行消抖操作,消抖又分为硬件消抖和软件消抖,两者可单独使用也可合并使用。
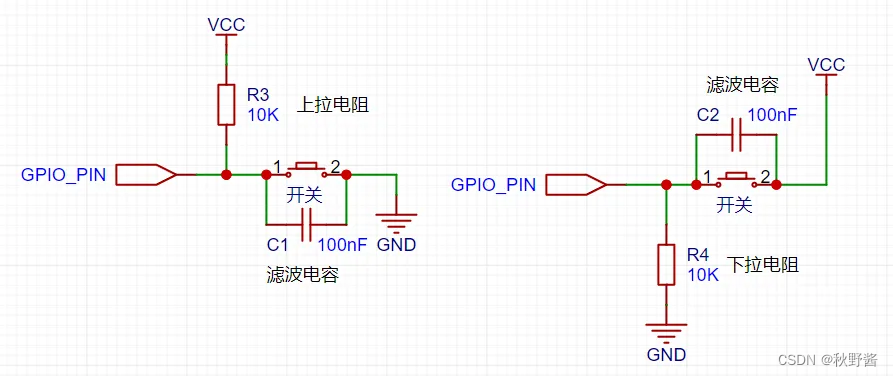
硬件消抖
为按钮两边添加滤波电容,可以实现消抖目的
软件消抖
● 在代码判定时,主动延时10ms左右再判断
● 使用嘀嗒定时器,记录并判断高低电平变化的间隔时间