在当今科技与生物工程快速融合的时代,传统领域之间的界限正在逐渐模糊,创造了许多前所未有的创新机会。机器人设计与食品加工这两个看似无关的研究领域,正在通过材料特性、制造工艺和功能的交叉融合,展现出巨大的潜力。
可食用机器人和机器人食品正是这种跨界融合的典型代表。这些可食用系统不仅能够感知、处理和对外界刺激作出反应,还可以应用于医疗保健、环境管理以及健康饮食习惯的推广。例如,精准的药物递送与体内健康监测、紧急情况下自主提供营养、减少农业废弃物、促进野生动物疫苗接种以及创造全新的美食体验,都是这些技术可能带来的革新性应用。
2024年5月28日,瑞士洛桑联邦理工学院机械工程研究所的Dario Floreano团队在Nature Reviews Materials期刊上发表了一篇名为:Towards edible robots and robotic food的观点文章。文章从机器人设计师的角度出发,确定了可以作为可食用机器人和机器人食品功能组件的可食用材料,如身体、驱动器、传感器、计算组件和能源源,介绍了最近的一些集成实例,并讨论了该领域面临的挑战。
可食用机器人主体材料的选择和应用
- 机器人主体的作用:通常作为传感器、驱动器、储能和计算组件的支架。材料选择、形状和制造工艺取决于机器人的预期功能。
- 材料特性:可食用材料通常比不可食用材料弹性更高(杨氏模量更低)。晶体蔗糖、纤维素和壳聚糖显示出较高的杨氏模量,但纤维素和壳聚糖只能在结肠中发酵,因此最好少量使用。食品材料密度较低,例如蛋白质和碳水化合物约为1.3 g/cm³,脂肪约为0.9 g/cm³,面包可低至0.2--0.3 g/cm³。
- 应用实例:明胶机械性能相当于不可食用弹性体,用于气动抓取器;膨化米饼相当于不可食用泡沫,用于无人机机翼。通过组合不同的食品材料,可以制成适合不同机器人应用的可食用复合材料。
- 耐水性和涂层:可食用机器人可能需要在潮湿环境中操作,可食用涂层可以调节水分和氧气渗透。潜在候选材料包括高脂肪食品材料、虫胶、魔芋、海藻酸钠和乙基纤维素等。
- 粘合剂:组装预成型结构需要粘合剂。虽然不可食用胶水粘附强度最大,但一些可食用胶水也有竞争力,例如淀粉、明胶、粘液、可食用蜡、阿拉伯胶、巧克力和基于糖的胶水。混合可食用粘合剂可以提高粘合强度。
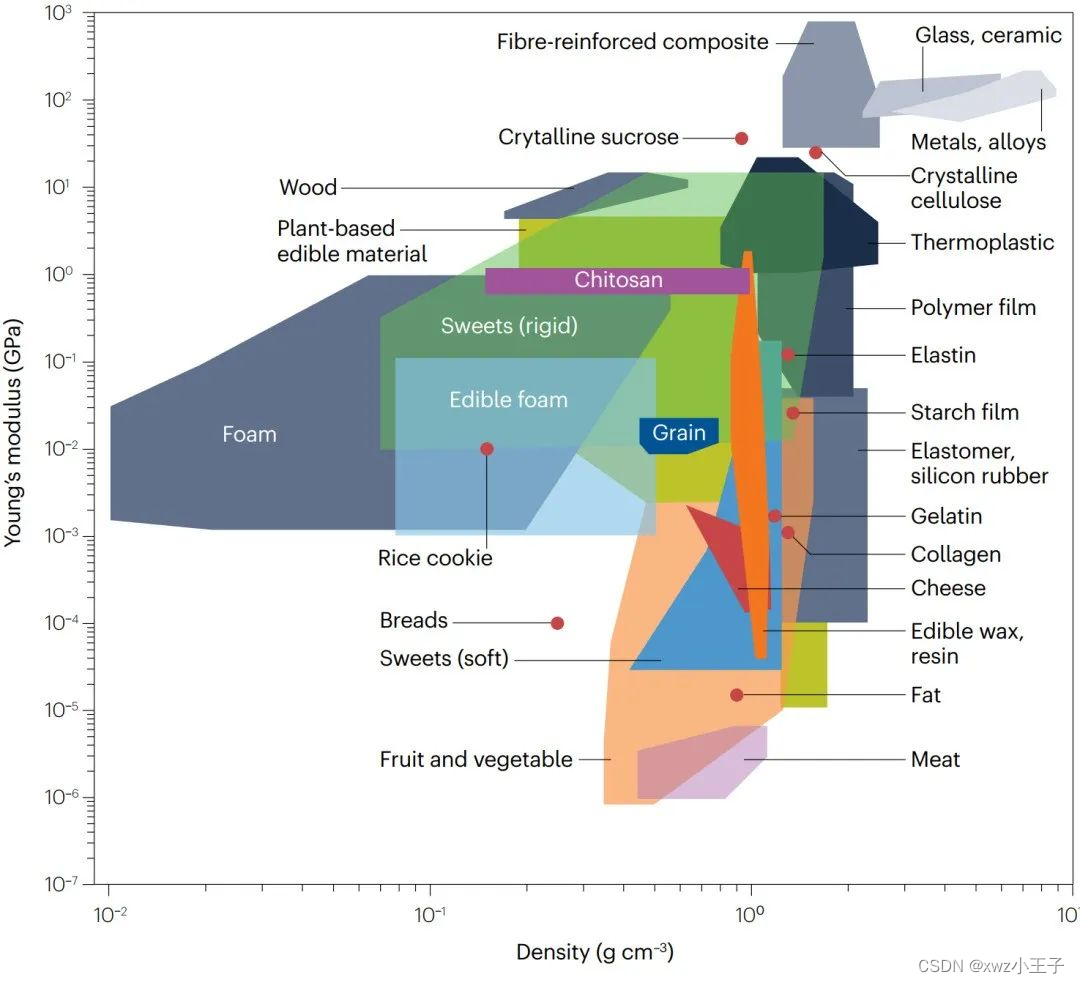
图1:食品材料与传统材料的机械性能比较。
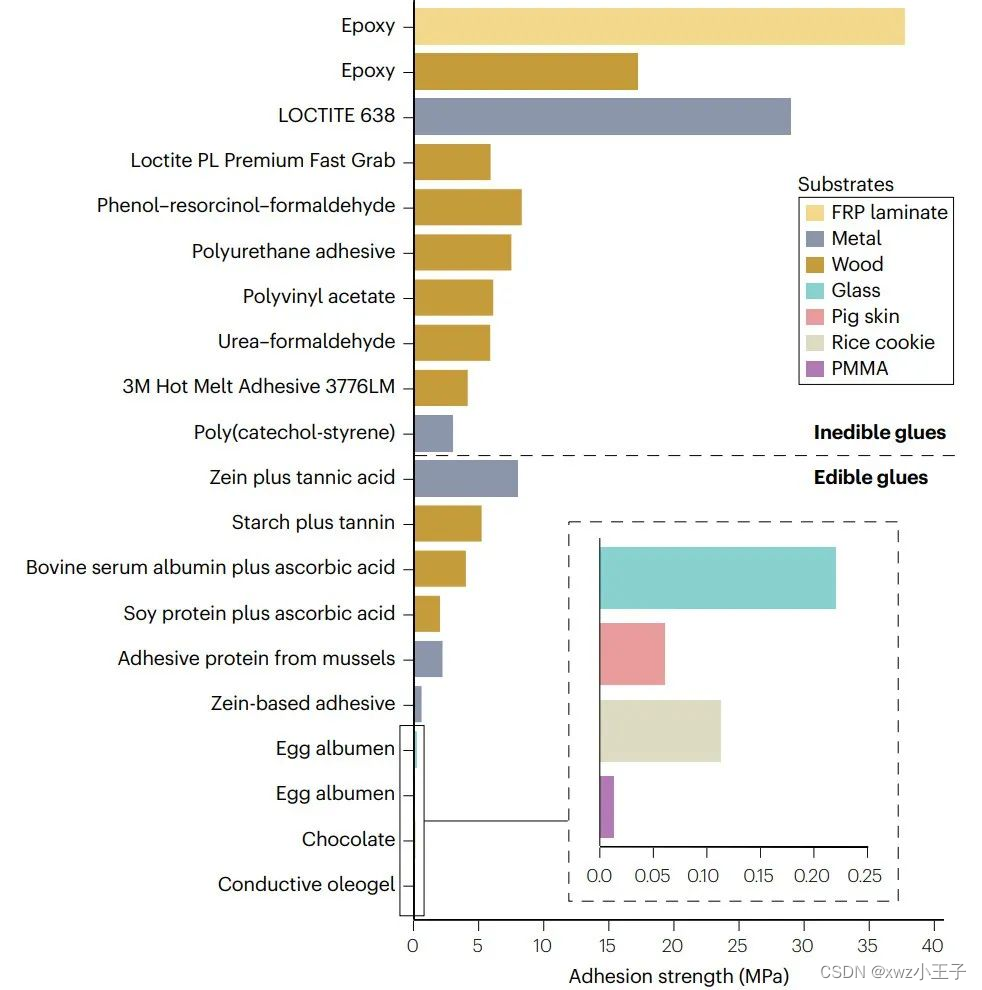
图2:不可食用胶水和可食用胶水的粘附强度。
可食用机器人的驱动器
驱动器类型:可食用驱动器可以设计成多种类型,包括流体弹性体、刺激响应聚合物和化学反应驱动器。例如,用明胶制成的气动人工肌肉显示出与非可食用弹性体制成的驱动器相当的性能。
化学反应驱动:可通过化学微反应在可食用驱动器内生成气体(如混合粉末酸、碱和水产生二氧化碳)来驱动。
刺激响应聚合物:特别是水凝胶,能够对环境刺激(如热、湿度、pH值和酶)做出机械响应。例如,水凝胶可以在环境湿度变化下实现自主弯曲和线性运动,已被研究用于制造可在人体内运行的可食用驱动器。
复杂运动和变形:通过在明胶、淀粉和粗面粉制成的可食用薄膜表面刻图案,并暴露在热和湿度刺激下,可获得弯曲、螺旋、包裹和爬行等复杂运动。
电-机械转换:利用电能转化为机械运动可能是实现复杂自主智能机器人食品和可食用机器人的最大潜力。例如,低电压明胶离子驱动器可在储存后重新水化以实现驱动。离子驱动吸引人之处在于其涉及低电压(通常低于10V)和食品中安全离子的高普遍性。
可食用机器人的传感器、计算设备和能源来源
传感器:
- 体外操作:可用于食品质量监测,例如用纤维素丰富的米纸和面粉基复合材料制成的湿度传感器,基于蜂蜡、镁、金和离子变色电解质的解冻传感器,基于活性炭、蜂蜡和植物油的水果成熟度传感器,红甘蓝花青素制成的pH比色传感器和用于检测食物保存状态的生物胺检测器。
- 体内操作:主要用于胃肠道监测,如利用糯米胶制成的人类唾液淀粉酶传感器、基于软糖果的唾液阻抗传感器和用明胶和西兰花薄膜制成的GI压力传感器。其他示例包括可食用的葡萄糖传感器和用于检测体液中的生物标志物的电化学平台。
计算设备: - 被动组件:包括用可食用导体和绝缘体制成的电阻器、感应器和电容器。常用的可食用导体包括金、银、镁等金属及有机材料,如活性炭和碳化糖。
- 主动组件:尽管目前制作完全可食用的晶体管仍有挑战,但部分可食用晶体管已被报道,利用了纳克量的有机生物相容性半导体材料。
- 流体控制电路:由泵、阀门和微通道组成的流体控制逻辑电路展示了将液体从输入端到输出端的逻辑功能。
能源来源: - 储能设备:包括充电的可食用电池和一次性可食用电化学电池,利用活性炭电极上固定的核黄素和槲皮素,及利用明胶和活性炭制成的燃料电池。
- 超电容器:用蜂蜡、活性炭、海藻等材料组合制成的可食用超电容器。
- 能量收集器:利用西兰花、卷心菜和菜花薄膜展示的压电效应,及基于乙基纤维素和活性炭的摩擦电效应,将机械能转化为电能。
这些传感器、计算设备和能源来源使得可食用机器人能够感知、处理信息并执行复杂操作,为其在食品监测和医学领域的应用提供了可能性。
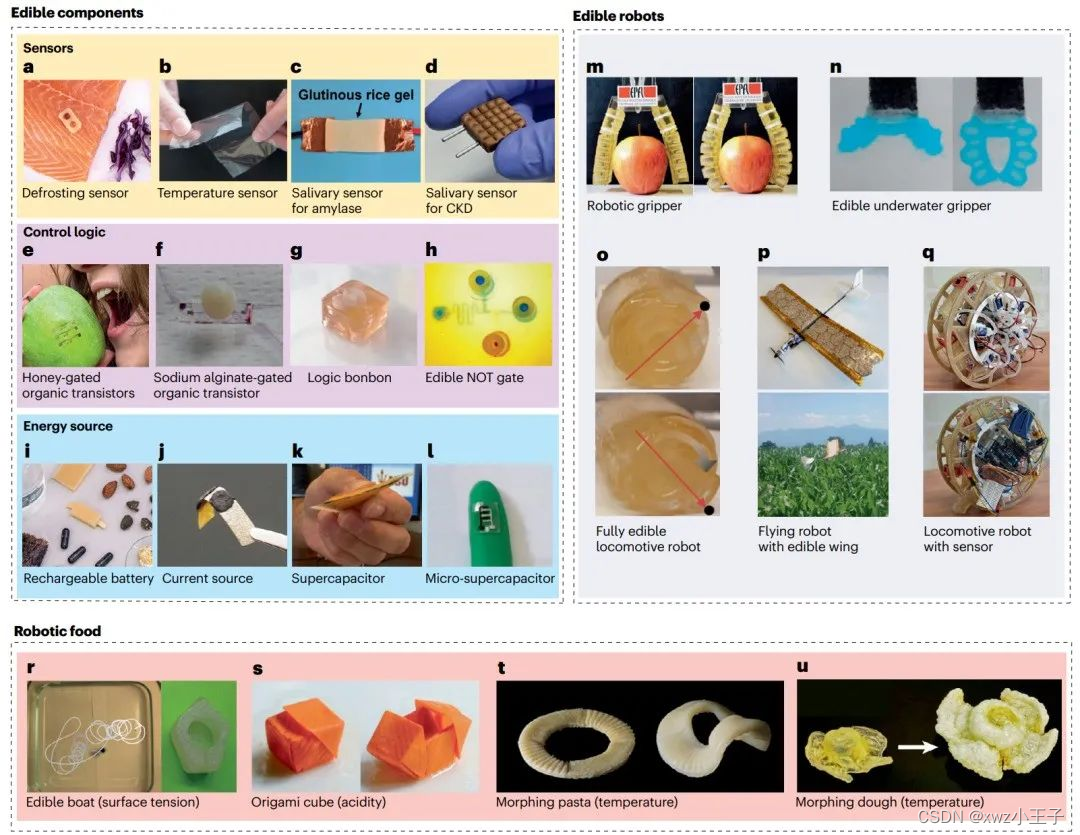
图3:可食用机器人和机器人食品的示例。
可食用机器人组件的制造过程
- 结构元素制造:采用了模压、冷冻结构化、爆米花化和挤压等方法。模压是一种常见方法,通过加热和冷却诱导的固化,用于制备各种结构,包括食品和机器人部件。冷冻结构化是模压的变体,通过冷冻固化液体,并随后升华冰晶和残留的水分。爆米花化是通过高温高压使高浓度的液体迅速蒸发,形成泡沫结构。3D食品打印是一种新兴方法,可用于创建复杂设计的食品,例如采用熔融沉积建模(FDM)和激光粉末烧结等技术。
- 功能性、保护性元素制造:采用了喷涂、喷墨打印、涂覆、热蒸发和微加工等方法。喷涂或刷涂溶液,然后蒸发溶剂是制造食品薄膜的主要方法,也可用于制造其他功能性元素。喷墨打印则可用于在低温下对组件进行图案化处理,如部分可食用晶体管。其他大面积材料沉积技术包括丝网印刷、旋涂、喷涂、条涂和滴铸等。最后,涂覆的食品组件可通过传统的湿法和干法刻蚀方法或激光微加工进行微结构化。
可食用机器人和机器人食品的例子 - 可食用机器人:这些机器人旨在执行典型的机器人任务,如抓取或运动,并在使用后具有营养功能。例如,可食用机器人可以在操作后被动物食用,而不是被回收和丢弃。这些机器人通常利用液压压力来施加力和执行工作。例如,柔软的可食用夹具可以由可食用弹性体制成,当从(不可食用的)外部压缩器施加压力时弯曲。还有其他例子,如可食用的鸟翼用于无人机,在远程地区投放应急食品;以及具有可食用气体产生反应器的完全可食用运动机器人。
- 机器人食品:这些食品主要是通过在外部刺激下进行预定义的变换来吸引和吸引人类,如湿度、温度和酸度。例如,可食用的华夫饼船和明胶鸡尾酒船可以在饮料表面上移动,利用马兰戈尼效应;还有折纸立方体,可以在滴上柠檬汁时展开,揭示开胃菜。这些机器人食品旨在吸引和教育人类,并对他们与营养健康食品的关系产生积极影响。
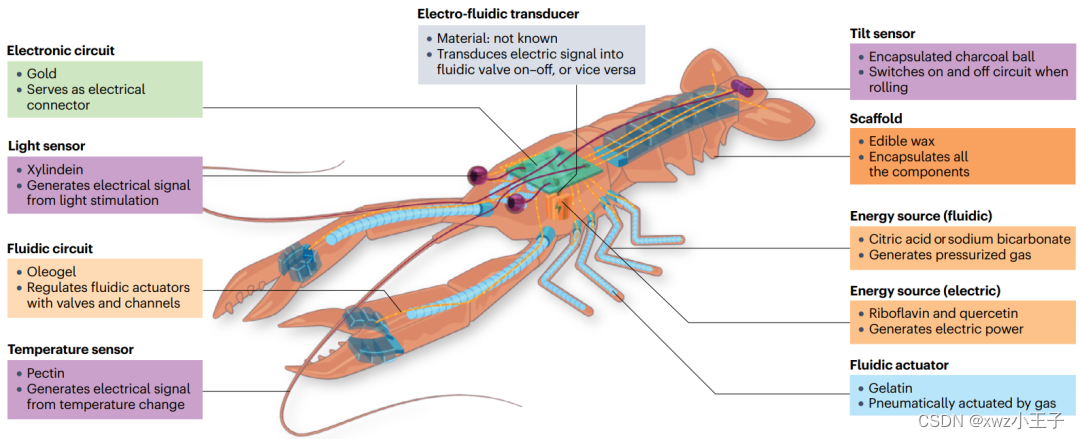
图4:未来可食用机器人的艺术渲染图。
小结展望
可食用机器人的发展取得了进展,但仍面临挑战。一些部件已经表现出可靠性,比如机体、电路和传感器,但其他部件,如执行器和能源源,还需要改进。目前的挑战包括整合各种可食用组件、微型化和理解营养和食物加工对性能的影响。解决这些问题将使可食用机器人能够更好地应用于医疗、环境监测等领域,并推动创新的烹饪体验。