你是不是也觉得,冲刷机器人防护服调松紧,不就是紧一紧带子的事?很多工程师和运维人员都这么想,结果要么是防护服过紧,导致机器人关节负载激增,电机过热报警;要么是过松,在高压水枪冲刷下,防护层翻卷、进水,防护形同虚设
你是不是也觉得,冲刷机器人防护服调松紧,不就是紧一紧带子的事?很多工程师和运维人员都这么想,结果要么是防护服过紧,导致机器人关节负载激增,电机过热报警;要么是过松,在高压水枪冲刷下,防护层翻卷、进水,防护形同虚设
你以为在保养,实际可能是在加速机器人的损坏
今天,我们就来彻底讲清楚冲刷机器人防护服怎么调松紧这件事
这里面存在的认知偏差和操作陷阱,可能正让你蒙受着不必要的停机损失
一、为什么"调松紧"这个基础操作,却成为高频故障点?核心原因在于:很多人混淆了"贴合"与"紧绷"的概念
机器人防护服并非穿得越紧越好
过紧的危害:会限制机器人各轴,特别是手腕、肘部等灵活关节的正常运动范围,增加伺服电机的运行阻力
长期在不正确的松紧度下运行,直接后果是关节过热、减速器磨损加剧、电缆异常弯折,维修成本远超防护服本身
过松的危害:在高压冲刷环境下,松垮的防护服极易发生"兜水"和"拍打"现象
水汽渗入、面料反复抽打机械臂,不仅起不到防锈、防水、防油的核心作用,反而会带来额外的物理冲击
所以,调节冲刷机器人防护服的松紧,目标不是勒紧,而是实现"动态贴合"
二、如何科学地调节冲刷机器人防护服松紧度?(正确步骤)以下是适用于大多数带调节带设计的防护服的通用方法,请务必在机器人静止且处于"零位"或常用姿态下进行:初始穿戴定位:确保防护服本体在机器人上的安装位置正确,各关节孔洞对位精准
这是后续所有调节的基础
关键区域优先:调节顺序应从主要承力或活动大关节开始,如机身底座、大臂连接处,确保服装置身稳定
关节处调节原则:调节肘关节、腕关节等部位的魔术贴或弹性束带时,应在机器人模拟该轴最大工作范围进行
方法:手动将机器人运行至该关节弯曲的最大角度,在此状态下,调节束带至贴合但不压迫的状态;再将其运行至伸直状态,检查是否过松
可能需要反复微调两到三次,找到两个极限位置下的平衡点
检查"呼吸空间":对于躯干等非活动区域,面料与机器人本体间应留有约1-2指宽的间隙
这个空间对于防水透气型防护材料的微气流循环、散热至关重要
动态测试验证:完成静态调节后,务必让机器人在低速下完整运行一遍工作轨迹
观察防护服是否有异常拉扯、扭曲或与周边设备发生干涉
听运行声音,有无因摩擦、绷紧产生的额外噪音
三、避开这些常见误区,你的调节就成功了一大半误区一:一次性拧紧/粘牢所有调节点
这必然导致局部过紧
应遵循"由主到次、交替调整"的原则
误区二:忽略材质特性
优质的防护服面料(如特定复合材料)可能具备一定的初始延展性
在初次调好松紧运行一段时间后,应进行二次复紧,这在机器人防护服安装调试初期是关键一步
误区三:以静态美观为标准
防护服在静止时略显褶皱是正常的,这为运动预留了余量
平整如铁桶反而是不专业的表现
四、选择设计科学的防护服,让"调松紧"事半功倍一套优秀的防护服,其松紧调节结构设计本身就应考虑到了易用性和可靠性
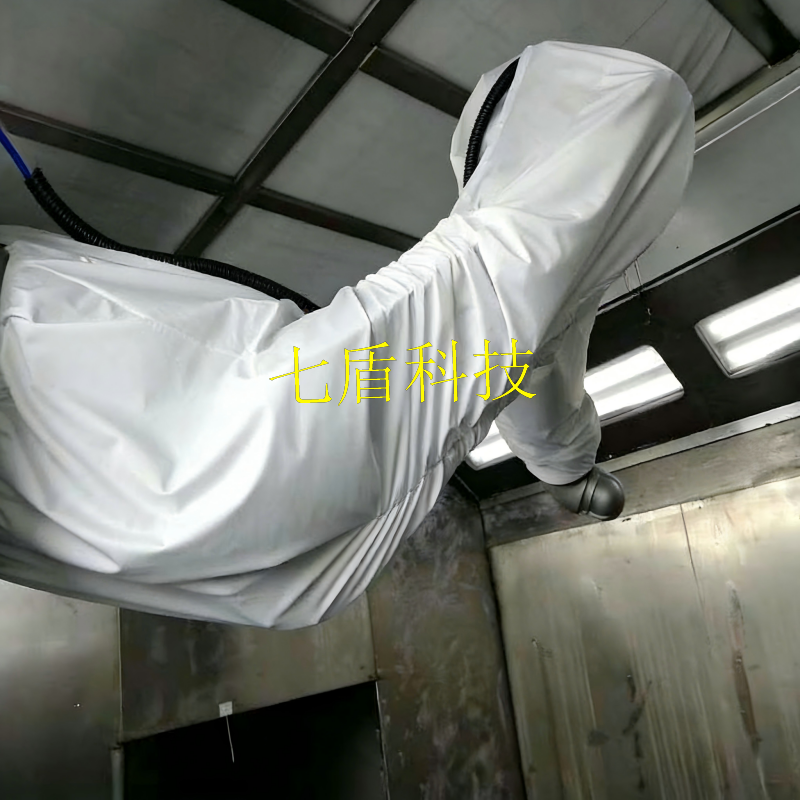
例如,在七盾科技(信宜)有限公司提供的解决方案中,针对高压冲洗场景机器人防护,其防护服的调节系统经过特殊设计:分区张力设计:在不同活动强度的区域,采用不同宽度和类型的调节带,避免"一处紧,处处紧"
快速调节机构:部分型号采用易于操作且能锁止的扣件,即便戴着手套也能轻松完成防护服松紧微调
预成型裁剪:根据常见机器人型号的运动学模型进行预成型立体裁剪,从源头减少因裁剪不合理导致的调节困难
记住,冲刷机器人防护服的松紧调节,是一项直接影响设备寿命与稳定性的技术动作,而非简单的体力活
它需要对机器人运动有一定了解,并遵循科学流程
下次当你再次面对"冲刷机器人防护服怎么调松紧"这个问题时,希望你能抛开固有经验,用上述方法重新审视
一套调节得当的防护服,应该是机器人的"第二层皮肤",隐形地、可靠地提供持久保护
如果你的团队在机器人防护服安装与松紧设置中仍遇到难题,或希望获得针对特定机器人型号的防护服穿戴调节指南,可以关注专业制造商的经验分享
七盾科技(信宜)有限公司也持续分享这类实用的技术细节,帮助用户规避潜在风险
你在调节防护服松紧时,还遇到过哪些意想不到的问题?或者有哪些独家心得?欢迎在评论区分享交流,共同避坑