在本节中,我们一起来仔细探讨一下EpollPoller类。该类可以说是muduo库中最最核心的类了,一定要搞懂!
文章目录
- 私有成员
-
- [`using ChannelList = std::vector<Channel*>`](#
using ChannelList = std::vector<Channel*>) - `looping_`、`quit_`
- `threadId_`
- `pollReturnTime_`、`poller_`
- `wakeup_fd`、`wakeupChannel_`
-
- [int wakeupFd_](#int wakeupFd_)
- [std::unique_ptr<Channel> wakeupChannel_](#std::unique_ptr
wakeupChannel_)
- [ChannelList activeChannels_](#ChannelList activeChannels_)
- 和回调相关的变量
- [`using ChannelList = std::vector<Channel*>`](#
- 简介成员方法
- 实现获取当前程序运行所属线程
私有成员
cpp
//事件循环类 主要包含了两个大模块channel Pollor(epoll的抽象)
class EventLoop : noncopyable {
public:
using Functor = std::function<void()>;
private:
using ChannelList = std::vector<Channel*>;
std::atomic_bool looping_; //原子操作,通过CAS实现
std::atomic_bool quit_; //标识退出loop循环
const pid_t threadId_; //记录当前loop所在线程的id
Timestamp pollReturnTime_; //poller返回事件的channels的时间点
std::unique_ptr<Poller> poller_;
int wakeupFd_;
std::unique_ptr<Channel> wakeupChannel_;
ChannelList activeChannels_;
std::atomic_bool calllingPendingFunctors_; //标识当前loop是否有需要执行的回调操作
std::vector<Functor> pendingFunctors_; //存储loop需要执行的所有回调操作
std::mutex mutex_; //互斥锁,用来保护上面vector容器的线程安全操作
};从上到下依次讲解各个成员:
using ChannelList = std::vector<Channel*>
这个就不用说了,每个EventLoop下面都封装了很多很多的channel类,我们使用一个数组来对这些channel进行管理
looping_、quit_
cpp
std::atomic_bool looping_; //原子操作,通过CAS实现
std::atomic_bool quit_; //标识退出loop循环这两个变量都是跟事件循环本身是否继续工作下去相关的控制变量。
looping_用来判断当前的EventLoop是否已经退出,我们定义的是原子操作的布尔值,底层使用CAS实现。
quit_,一般我们是在其他线程来调用EventLoop的quit,来退出eventLoop循环
threadId_
cpp
const pid_t threadId_; //记录当前loop所在线程的id这里我们需要结合图片来讲解:
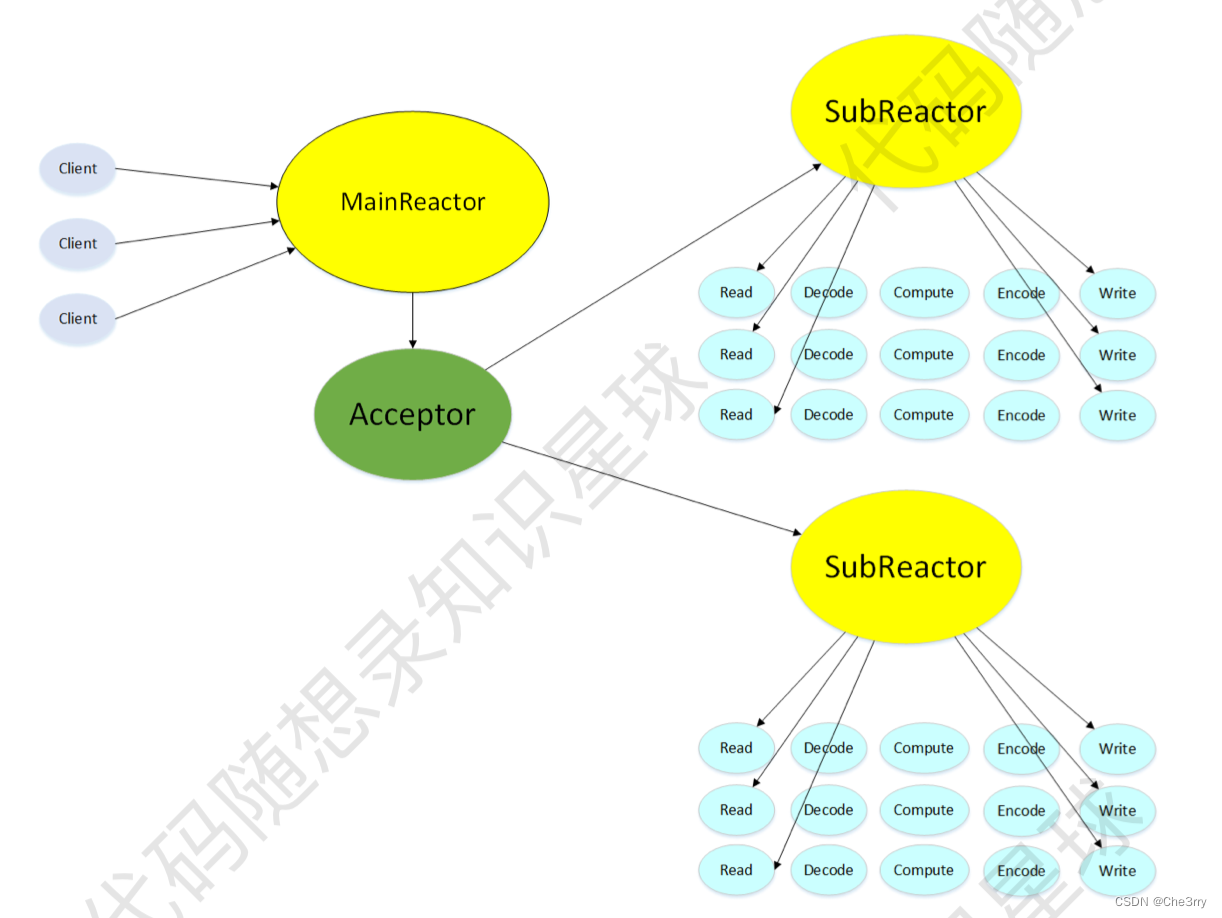
首先需要明确的是,这里的Reactor就表示我们的EventLoop,并且每一个线程都应该有而且只有一个Reactor模型。
在多线程反应堆模型中,mainReactor只用来建立新用户的连接,拿到cfd之后,把该fd和它感兴趣的事件打包成一个channel,然后唤醒我们某一个workerReactor(使用轮询的方式) ,把这个channel扔给一个workerReactor,每一个 workReactor 都监听一组channel,并且每一组channel发生的事件都得在自己的EventLoop线程中去执行。
所以在代码上就是通过这个threadId来实现这个流程,因为threadId作为EventLoop的成员变量就记录了创建的EventLoop对象所在的线程ID,等到运行时和当前工作的线程一比较,就能够判断EventLoop在不在它自己的线程中。
更加具体的描述请看后面具体的应用。
pollReturnTime_、poller_
cpp
Timestamp pollReturnTime_; //poller返回事件的channels的时间点
std::unique_ptr<Poller> poller_;- 这里
pollReturnTime_记录的是poller返回发生时间的channels的时间点。
EventLoop调用的是多路事件分发器也就是我们的Poller类,事件分发器epoll_wait开启循环后就监听事件发生,有事件发生后就会给Reactor返回发生事件的event,就是我们之前写的EPollPoler中Poll函数处理的那个activeChannels,其函数返回值就是 epoll_wait 监听到事件发生的时间戳。 - 接下来当然少不了我们的poller了,这是Reactor模型中需要管理的重要资源多路事件分发器。
wakeup_fd、wakeupChannel_
cpp
int wakeupFd_;
std::unique_ptr<Channel> wakeupChannel_;这是两个相当重要的组建,我们首先介绍 wakeupFd_。
int wakeupFd_
我们想要弄明白muduo库,就必须**搞明白mainReactor如何给我们的subReactor分配新连接**,muduo库中使用的是轮询操作,那么它具体是如何唤醒subReactor线程的呢?要知道,在subReactor中如果没有事件发生,他们loop所在的线程都是阻塞的,假如说现在mainReactor监听到了一个新用户的连接,得到了表示新用户连接的fd\以及感兴趣事件的channel的话,他把这个channel怎么扔给subReactor呢?
假如说我通过轮询,决定把新用户连接的channel分发给下面的那个subReactor,我怎么把他叫醒呢?
这其实就是统一事件元的原理了,
在我们的libevent中,它的基本原理和muduo差不多,不过在唤醒子线程的步骤中,它采用的是socketpair。创建了一个本地socket的数组,跟管道不一样的是,这两个socket都是可读可写的,不像管道只能一端读、一端写。
我们的muduo采用的是系统调用eventfd,这个eventfd就是用于线程通信的,我这个线程可以通知其他线程起来做事,并且调用这个方法内核可以直接去notify用户空间的应用程序线程起来做事情,效率非常之高。
所以这个wakeupFd_就是我们使用函数eventfd创建出来的,主要作用就是当mainLoop获取一个新用户的channel,通过轮询算法选择一个subLoop反应堆,通过该成员唤醒subloop。
std::unique_ptr wakeupChannel_
这个wakeupChannel肯定是要把wakeupFd封装起来的,因为我们在Poller里面并不会直接操作fd,而是在操作channel。
ChannelList activeChannels_
这个就是我们的EventLoop所管理的所有的Channel。并且他们都已经有相应的事件被激活了,该成员肯定是要被用于回调中的。
和回调相关的变量
cpp
std::atomic_bool calllingPendingFunctors_; //标识当前loop是否有需要执行的回调操作
std::vector<Functor> pendingFunctors_; //存储loop需要执行的所有回调操作
std::mutex mutex_; //互斥锁,用来保护上面vector容器的线程安全操作可以看到,我们的EventLoop类还是比较复杂的,至于为什么需要这些成员变量后续会进行一个总结性的探讨。
简介成员方法
cpp
//事件循环类 主要包含了两个大模块channel Pollor(epoll的抽象)
class EventLoop : noncopyable {
public:
using Functor = std::function<void()>;
EventLoop();
~EventLoop();
//开启事件循环
void loop();
//退出事件循环
void quit();
Timestamp pollReturnTime() const { return pollReturnTime_; }
// 在当前loop中执行cb
void runInLoop(Functor cb);
//把cb放入队列中,唤醒loop所在的线程后再去执行cb
void queueInLoop(Functor cb);
//用来唤醒loop所在的线程
void wakeup();
// EventLoop的方法==》Poller的方法
void updateChannel(Channel *channel);
void removeChannel(Channel *channel);
void hasChannel(Channel *channel);
//判断EventLoop对象是否已经在自己的线程里面
bool isInLoopThread() const { return threadId_ == CurrentThread::tid(); }
private:
void handleRead(); //wake up我们唤醒来使用的
void doPendingFunctors(); //执行回调的内部接口这里主要强调一下函数 isInLoopThread()
这里的CurrentThread::tid()是返回当前线程的线程ID;
如果这两个相等的话,说明我们的EventLoop对象目前所处的线程就在创建它的线程里,那么我们可以正常执行回调,如果不在的话,我们就得调用queueInLoop,当唤醒到它自己线程的时候,才去执行该loop相关的回调操作。
因为我们前文已经反复强调过,我们的每一个channel都有自己的EventLoop,每一个EventLoop也只属于一个线程,所以当事件发生需要执行回调,我们不能让别的EventLoop来执行,必须让自己的EventLoop来执行相对应的回调。
那么问题来了,为什么必须得是对应的EventLoop来处理回调任务呢?
- 线程安全问题
- EventLoop及其管理的资源(如Channel、Poller等)并不是线程安全的。如果一个EventLoop对象被多个线程同时访问,可能会导致数据竞争、状态不一致等问题,最终导致程序崩溃或产生难以调试的错误。
- 事件处理顺序错乱
- EventLoop依赖于事件循环机制按顺序处理事件。如果回调操作由非对应的EventLoop调用,事件处理的顺序可能会错乱,导致意外的行为。例如,某些依赖顺序的事件处理(如读取数据后处理数据)可能会发生在不正确的顺序,从而导致逻辑错误。
实现获取当前程序运行所属线程
cpp
//CurrenThread.h
#pragma once
#include <unistd.h>
#include <syscall.h>
namespace CurrentThread {
extern __thread int t_cachedTid;
void cacheTid();
inline int tid() {
if (__builtin_expect(t_cachedTid == 0, 0))
cacheTid();
return t_cachedTid;
}
}
//CurrenThread.cc
#include "CurrentThread.h"
namespace CurrentThread {
__thread int t_cachedTid = 0;
void cacheTid() {
if (t_cachedTid == 0) {
//通过linux系统调用,获取当前线程的tid值
t_cachedTid = static_cast<pid_t>(::syscall(SYS_gettid));
}
}
} // namespace CurrentThread