一、MPU6050的读写时序
1. MPU6050写时序
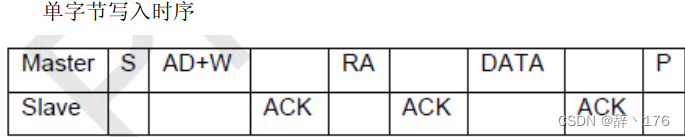
- 首先是IIC的起始信号,也就是:
cpp
MPU_IIC_Start(); - 然后接下来便是发送器件地址以及写命令:其中MPU6050的地址为7位,而八位为一个数据帧,所以在最后一位再加一位是指定对寄存器是读还是写操作。而器件地址上篇也介绍了,当AD0为0则地址为0X68,否则为0X69,这里我接的0,即地址为0x68;左移一位,低位自动补0,我们为写操作,所以无需操作。
cpp
MPU_IIC_Send_Byte(0x68<<1);//发送器件地址+写命令- 等待ACK响应:
cpp
MPU_IIC_Wait_Ack();//等待应答- 写需要操作的寄存器地址:这里以reg代替。
cpp
MPU_IIC_Send_Byte(reg); //写寄存器地址5.等待ACK响应:
cpp
MPU_IIC_Wait_Ack();//等待应答- 发送需要对寄存器操作的数据:以data代替
cpp
MPU_IIC_Send_Byte(data);//发送数据- 最后等待Ack响应,结束IIC;
cpp
MPU_IIC_Wait_Ack(); //等待ACK
MPU_IIC_Stop(); 这样,一个写时序就写好了;附上完整代码:当然,对于ACK的应答结果也可以不处理,和上面一样就好了。
cpp
//IIC写一个字节
//reg:寄存器地址
//data:数据
//返回值:0,正常
// 其他,错误代码
u8 MPU_Write_Byte(u8 reg,u8 data)
{
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|0);//发送器件地址+写命令
if(MPU_IIC_Wait_Ack()) //等待应答
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Send_Byte(data);//发送数据
if(MPU_IIC_Wait_Ack()) //等待ACK
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Stop();
return 0;
}2.MPU6050读时序:
其步骤也是按照框图去写,这里就不再一步步教了,也比较简单,这里直接给出完整代码:
cpp
//IIC读一个字节
//reg:寄存器地址
//返回值:读到的数据
u8 MPU_Read_Byte(u8 reg)
{
u8 res;
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|0);//发送器件地址+写命令
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|1);//发送器件地址+读命令
MPU_IIC_Wait_Ack(); //等待应答
res=MPU_IIC_Read_Byte(0);//读取数据,发送nACK
MPU_IIC_Stop(); //产生一个停止条件
return res;
}3. MPU6050连续写时序:
其步骤与写时序类似,只是在传完一个数据等待ACK后并不给结束信号,而是接着发送数据,最后再发送停止信号。
cpp
//IIC连续写
//addr:器件地址
//reg:寄存器地址
//len:写入长度
//buf:数据区
//返回值:0,正常
// 其他,错误代码
u8 MPU_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf)
{
u8 i;
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr<<1)|0);//发送器件地址+写命令
if(MPU_IIC_Wait_Ack()) //等待应答
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
for(i=0;i<len;i++)
{
MPU_IIC_Send_Byte(buf[i]); //发送数据
if(MPU_IIC_Wait_Ack()) //等待ACK
{
MPU_IIC_Stop();
return 1;
}
}
MPU_IIC_Stop();
return 0;
} 4. MPU6050连续读时序:
cpp
//IIC连续读
//addr:器件地址
//reg:要读取的寄存器地址
//len:要读取的长度
//buf:读取到的数据存储区
//返回值:0,正常
// 其他,错误代码
u8 MPU_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf)
{
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr<<1)|0);//发送器件地址+写命令
if(MPU_IIC_Wait_Ack()) //等待应答
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr<<1)|1);//发送器件地址+读命令
MPU_IIC_Wait_Ack(); //等待应答
while(len)
{
if(len==1)*buf=MPU_IIC_Read_Byte(0);//读数据,发送nACK
else *buf=MPU_IIC_Read_Byte(1); //读数据,发送ACK
len--;
buf++;
}
MPU_IIC_Stop(); //产生一个停止条件
return 0;
}其方框的解释如下:
二、获取MPU6050的温度值

由上可知,Temp = (TEMP_OUT15:8 << 8 | TEMP_OUT7:0)/340 + 36.53;那么接下来就简单了,直接用连续读函数读取0x41就可以了。(连续读函数读完地址自增1,即为0x42)代码如下:
cpp
//得到温度值
//返回值:温度值(扩大了100倍)
short MPU_Get_Temperature(void)
{
u8 buf[2]; //用于存放温度
short raw;
float temp;
MPU_Read_Len(MPU_ADDR,MPU_TEMP_OUTH_REG,2,buf); //连续读两次,第一次为0x41,第二次为0x42
raw=((u16)buf[0]<<8)|buf[1]; //将8位数据整合为16位
temp=36.53+((double)raw)/340; //得到温度值
return temp*100;//为了好处理数据,这里扩大100倍
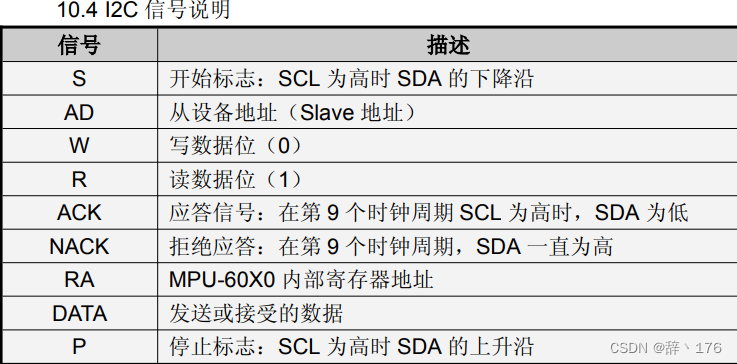
}三、获取陀螺仪值
其地址如上,从上到下分别为X轴高八位陀螺仪值、x轴低八位陀螺仪值、Y轴高八位陀螺仪值......
那么想得到这些值也很简单了,由于其地址为连续的,我们只需调取连续读函数读0x43就可以了。
cpp
//得到陀螺仪值(原始值)
//gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
void MPU_Get_Gyroscope(short *gx,short *gy,short *gz)
{
u8 buf[6];
MPU_Read_Len(MPU_ADDR,MPU_GYRO_XOUTH_REG,6,buf);
*gx=((u16)buf[0]<<8)|buf[1];
*gy=((u16)buf[2]<<8)|buf[3];
*gz=((u16)buf[4]<<8)|buf[5];
}然后只需在主函数中调用这个函数就可以读取其值了,当然,现在这些值是还未经过处理的。
cpp
MPU_Get_Gyroscope(&x,&y,&z);
OLED_ShowNum(0,0,x,5,16,1);
OLED_ShowNum(0,16,y,5,16,1);
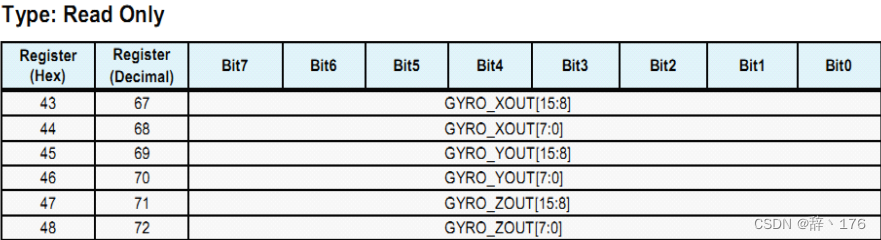
OLED_ShowNum(0,32,z,5,16,1);四、获取加速度值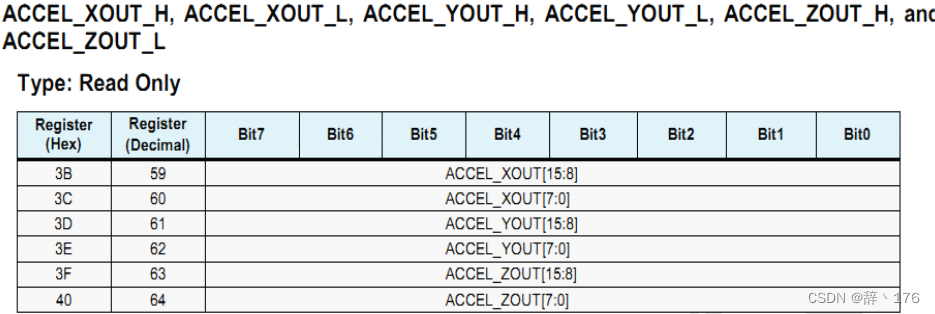
其地址如上,从上到下分别为X轴高八位陀加速度值、x轴低八位加速度值、Y轴高八位加速度值......由于其地址也为连续的,我们只需调取连续读函数读0x3b读取6次就可以了。
cpp
//得到加速度值(原始值)
//gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
void MPU_Get_Accelerometer(short *ax,short *ay,short *az)
{
u8 buf[6];
MPU_Read_Len(MPU_ADDR,MPU_ACCEL_XOUTH_REG,6,buf);
*ax=((u16)buf[0]<<8)|buf[1];
*ay=((u16)buf[2]<<8)|buf[3];
*az=((u16)buf[4]<<8)|buf[5];
}至此,MPU6050的使用长不多已经写完了,下一章将继续讲解MPU6050怎样将原始数据格式转换为欧拉角:航向角(yaw,也叫偏航角)、横滚角(roll)和俯仰角(pitch)。
这里附上其总代码:
mpu6050.c
cpp
#include "mpu6050.h"
//初始化MPU6050
//返回值:0,成功
// 其他,错误代码
u8 MPU_Init(void)
{
u8 res;
MPU_IIC_Init();//初始化IIC总线
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //复位MPU6050
delay_ms(100);
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //唤醒MPU6050
MPU_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps
MPU_Set_Accel_Fsr(0); //加速度传感器,±2g
MPU_Set_Rate(50); //设置采样率50Hz
MPU_Write_Byte(MPU_INT_EN_REG,0X00); //关闭所有中断
MPU_Write_Byte(MPU_USER_CTRL_REG,0X00); //I2C主模式关闭
MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); //关闭FIFO
res=MPU_Read_Byte(MPU_DEVICE_ID_REG);
if(res==MPU_ADDR)//器件ID正确
{
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); //设置CLKSEL,PLL X轴为参考
MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00); //加速度与陀螺仪都工作
MPU_Set_Rate(50); //设置采样率为50Hz
}else return 1;
return 0;
}
//设置MPU6050陀螺仪传感器满量程范围
//fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps
//返回值:0,设置成功
// 其他,设置失败
u8 MPU_Set_Gyro_Fsr(u8 fsr)
{
return MPU_Write_Byte(MPU_GYRO_CFG_REG,fsr<<3);//设置陀螺仪满量程范围
}
//设置MPU6050加速度传感器满量程范围
//fsr:0,±2g;1,±4g;2,±8g;3,±16g
//返回值:0,设置成功
// 其他,设置失败
u8 MPU_Set_Accel_Fsr(u8 fsr)
{
return MPU_Write_Byte(MPU_ACCEL_CFG_REG,fsr<<3);//设置加速度传感器满量程范围
}
//设置MPU6050的数字低通滤波器
//lpf:数字低通滤波频率(Hz)
//返回值:0,设置成功
// 其他,设置失败
u8 MPU_Set_LPF(u16 lpf)
{
u8 data=0;
if(lpf>=188)data=1;
else if(lpf>=98)data=2;
else if(lpf>=42)data=3;
else if(lpf>=20)data=4;
else if(lpf>=10)data=5;
else data=6;
return MPU_Write_Byte(MPU_CFG_REG,data);//设置数字低通滤波器
}
//设置MPU6050的采样率(假定Fs=1KHz)
//rate:4~1000(Hz)
//返回值:0,设置成功
// 其他,设置失败
u8 MPU_Set_Rate(u16 rate)
{
u8 data;
if(rate>1000)rate=1000;
if(rate<4)rate=4;
data=1000/rate-1;
data=MPU_Write_Byte(MPU_SAMPLE_RATE_REG,data); //设置数字低通滤波器
return MPU_Set_LPF(rate/2); //自动设置LPF为采样率的一半
}
//IIC写一个字节
//reg:寄存器地址
//data:数据
//返回值:0,正常
// 其他,错误代码
u8 MPU_Write_Byte(u8 reg,u8 data)
{
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|0);//发送器件地址+写命令
if(MPU_IIC_Wait_Ack()) //等待应答
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Send_Byte(data);//发送数据
if(MPU_IIC_Wait_Ack()) //等待ACK
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Stop();
return 0;
}
//IIC读一个字节
//reg:寄存器地址
//返回值:读到的数据
u8 MPU_Read_Byte(u8 reg)
{
u8 res;
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|0);//发送器件地址+写命令
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|1);//发送器件地址+读命令
MPU_IIC_Wait_Ack(); //等待应答
res=MPU_IIC_Read_Byte(0);//读取数据,发送nACK
MPU_IIC_Stop(); //产生一个停止条件
return res;
}
//IIC连续写
//addr:器件地址
//reg:寄存器地址
//len:写入长度
//buf:数据区
//返回值:0,正常
// 其他,错误代码
u8 MPU_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf)
{
u8 i;
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr<<1)|0);//发送器件地址+写命令
if(MPU_IIC_Wait_Ack()) //等待应答
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
for(i=0;i<len;i++)
{
MPU_IIC_Send_Byte(buf[i]); //发送数据
if(MPU_IIC_Wait_Ack()) //等待ACK
{
MPU_IIC_Stop();
return 1;
}
}
MPU_IIC_Stop();
return 0;
}
//IIC连续读
//addr:器件地址
//reg:要读取的寄存器地址
//len:要读取的长度
//buf:读取到的数据存储区
//返回值:0,正常
// 其他,错误代码
u8 MPU_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf)
{
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr<<1)|0);//发送器件地址+写命令
if(MPU_IIC_Wait_Ack()) //等待应答
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr<<1)|1);//发送器件地址+读命令
MPU_IIC_Wait_Ack(); //等待应答
while(len)
{
if(len==1)*buf=MPU_IIC_Read_Byte(0);//读数据,发送nACK
else *buf=MPU_IIC_Read_Byte(1); //读数据,发送ACK
len--;
buf++;
}
MPU_IIC_Stop(); //产生一个停止条件
return 0;
}
//得到温度值
//返回值:温度值(扩大了100倍)
short MPU_Get_Temperature(void)
{
u8 buf[2]; //用于存放温度
short raw;
float temp;
MPU_Read_Len(MPU_ADDR,MPU_TEMP_OUTH_REG,2,buf); //连续读两次,第一次为0x41,第二次为0x42
raw=((u16)buf[0]<<8)|buf[1]; //将8位数据整合为16位
temp=36.53+((double)raw)/340; //得到温度值
return temp*100;//为了好处理数据,这里扩大100倍
}
//得到陀螺仪值(原始值)
//gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
//返回值:0,成功
// 其他,错误代码
void MPU_Get_Gyroscope(short *gx,short *gy,short *gz)
{
u8 buf[6];
MPU_Read_Len(MPU_ADDR,MPU_GYRO_XOUTH_REG,6,buf);
*gx=((u16)buf[0]<<8)|buf[1];
*gy=((u16)buf[2]<<8)|buf[3];
*gz=((u16)buf[4]<<8)|buf[5];
}
//得到加速度值(原始值)
//gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
void MPU_Get_Accelerometer(short *ax,short *ay,short *az)
{
u8 buf[6];
MPU_Read_Len(MPU_ADDR,MPU_ACCEL_XOUTH_REG,6,buf);
*ax=((u16)buf[0]<<8)|buf[1];
*ay=((u16)buf[2]<<8)|buf[3];
*az=((u16)buf[4]<<8)|buf[5];
}mpu6050.h
cpp
#ifndef __MPU6050_H
#define __MPU6050_H
#include "mpuiic.h"
//
//本程序只供学习使用,未经作者许可,不得用于其它任何用途
//ALIENTEK战舰STM32开发板V3
//MPU6050 驱动代码
//正点原子@ALIENTEK
//技术论坛:www.openedv.com
//创建日期:2015/1/17
//版本:V1.0
//版权所有,盗版必究。
//Copyright(C) 广州市星翼电子科技有限公司 2009-2019
//All rights reserved
//
//MPU6050 AD0控制脚
#define MPU_AD0_CTRL PAout(15) //控制AD0电平,从而控制MPU地址
//#define MPU_ACCEL_OFFS_REG 0X06 //accel_offs寄存器,可读取版本号,寄存器手册未提到
//#define MPU_PROD_ID_REG 0X0C //prod id寄存器,在寄存器手册未提到
#define MPU_SELF_TESTX_REG 0X0D //自检寄存器X
#define MPU_SELF_TESTY_REG 0X0E //自检寄存器Y
#define MPU_SELF_TESTZ_REG 0X0F //自检寄存器Z
#define MPU_SELF_TESTA_REG 0X10 //自检寄存器A
#define MPU_SAMPLE_RATE_REG 0X19 //采样频率分频器
#define MPU_CFG_REG 0X1A //配置寄存器
#define MPU_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器
#define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器
#define MPU_MOTION_DET_REG 0X1F //运动检测阀值设置寄存器
#define MPU_FIFO_EN_REG 0X23 //FIFO使能寄存器
#define MPU_I2CMST_CTRL_REG 0X24 //IIC主机控制寄存器
#define MPU_I2CSLV0_ADDR_REG 0X25 //IIC从机0器件地址寄存器
#define MPU_I2CSLV0_REG 0X26 //IIC从机0数据地址寄存器
#define MPU_I2CSLV0_CTRL_REG 0X27 //IIC从机0控制寄存器
#define MPU_I2CSLV1_ADDR_REG 0X28 //IIC从机1器件地址寄存器
#define MPU_I2CSLV1_REG 0X29 //IIC从机1数据地址寄存器
#define MPU_I2CSLV1_CTRL_REG 0X2A //IIC从机1控制寄存器
#define MPU_I2CSLV2_ADDR_REG 0X2B //IIC从机2器件地址寄存器
#define MPU_I2CSLV2_REG 0X2C //IIC从机2数据地址寄存器
#define MPU_I2CSLV2_CTRL_REG 0X2D //IIC从机2控制寄存器
#define MPU_I2CSLV3_ADDR_REG 0X2E //IIC从机3器件地址寄存器
#define MPU_I2CSLV3_REG 0X2F //IIC从机3数据地址寄存器
#define MPU_I2CSLV3_CTRL_REG 0X30 //IIC从机3控制寄存器
#define MPU_I2CSLV4_ADDR_REG 0X31 //IIC从机4器件地址寄存器
#define MPU_I2CSLV4_REG 0X32 //IIC从机4数据地址寄存器
#define MPU_I2CSLV4_DO_REG 0X33 //IIC从机4写数据寄存器
#define MPU_I2CSLV4_CTRL_REG 0X34 //IIC从机4控制寄存器
#define MPU_I2CSLV4_DI_REG 0X35 //IIC从机4读数据寄存器
#define MPU_I2CMST_STA_REG 0X36 //IIC主机状态寄存器
#define MPU_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器
#define MPU_INT_EN_REG 0X38 //中断使能寄存器
#define MPU_INT_STA_REG 0X3A //中断状态寄存器
#define MPU_ACCEL_XOUTH_REG 0X3B //加速度值,X轴高8位寄存器
#define MPU_ACCEL_XOUTL_REG 0X3C //加速度值,X轴低8位寄存器
#define MPU_ACCEL_YOUTH_REG 0X3D //加速度值,Y轴高8位寄存器
#define MPU_ACCEL_YOUTL_REG 0X3E //加速度值,Y轴低8位寄存器
#define MPU_ACCEL_ZOUTH_REG 0X3F //加速度值,Z轴高8位寄存器
#define MPU_ACCEL_ZOUTL_REG 0X40 //加速度值,Z轴低8位寄存器
#define MPU_TEMP_OUTH_REG 0X41 //温度值高八位寄存器
#define MPU_TEMP_OUTL_REG 0X42 //温度值低8位寄存器
#define MPU_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器
#define MPU_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器
#define MPU_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器
#define MPU_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器
#define MPU_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器
#define MPU_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器
#define MPU_I2CSLV0_DO_REG 0X63 //IIC从机0数据寄存器
#define MPU_I2CSLV1_DO_REG 0X64 //IIC从机1数据寄存器
#define MPU_I2CSLV2_DO_REG 0X65 //IIC从机2数据寄存器
#define MPU_I2CSLV3_DO_REG 0X66 //IIC从机3数据寄存器
#define MPU_I2CMST_DELAY_REG 0X67 //IIC主机延时管理寄存器
#define MPU_SIGPATH_RST_REG 0X68 //信号通道复位寄存器
#define MPU_MDETECT_CTRL_REG 0X69 //运动检测控制寄存器
#define MPU_USER_CTRL_REG 0X6A //用户控制寄存器
#define MPU_PWR_MGMT1_REG 0X6B //电源管理寄存器1
#define MPU_PWR_MGMT2_REG 0X6C //电源管理寄存器2
#define MPU_FIFO_CNTH_REG 0X72 //FIFO计数寄存器高八位
#define MPU_FIFO_CNTL_REG 0X73 //FIFO计数寄存器低八位
#define MPU_FIFO_RW_REG 0X74 //FIFO读写寄存器
#define MPU_DEVICE_ID_REG 0X75 //器件ID寄存器
//如果AD0脚(9脚)接地,IIC地址为0X68(不包含最低位).
//如果接V3.3,则IIC地址为0X69(不包含最低位).
#define MPU_ADDR 0X68
因为模块AD0默认接GND,所以转为读写地址后,为0XD1和0XD0(如果接VCC,则为0XD3和0XD2)
//#define MPU_READ 0XD1
//#define MPU_WRITE 0XD0
u8 MPU_Init(void); //初始化MPU6050
u8 MPU_Write_Len(u8 addr,u8 reg,u8 len,u8 *buf);//IIC连续写
u8 MPU_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf); //IIC连续读
u8 MPU_Write_Byte(u8 reg,u8 data); //IIC写一个字节
u8 MPU_Read_Byte(u8 reg); //IIC读一个字节
u8 MPU_Set_Gyro_Fsr(u8 fsr);
u8 MPU_Set_Accel_Fsr(u8 fsr);
u8 MPU_Set_LPF(u16 lpf);
u8 MPU_Set_Rate(u16 rate);
u8 MPU_Set_Fifo(u8 sens);
short MPU_Get_Temperature(void);
void MPU_Get_Gyroscope(short *gx,short *gy,short *gz);
void MPU_Get_Accelerometer(short *ax,short *ay,short *az);
#endif