1.串口控制小车
- 串口分文件编程进行代码整合,通过现象来改代码
2.接入蓝牙模块,通过蓝牙控制小车
3.添加点动控制,如果APP支持按下一直发数据,松开就停止发数据(蓝牙调试助手的自定义按键不能实现),就能实现前进按键按下后小车一直往前走的功能
2.如何进行小车PWM调速
原理:全速前进是LeftCon1A = 0; LeftCon1B = 1;完全停止是LeftCon1A = 0;LeftCon1B = 0;那么单位时间内,比如20ms, 有15ms是全速前进,5ms是完全停止,速度就会比5ms全速前进,15ms完全停止获得的功率多,相应的速度更快!
总结:前进时间占比少就慢,前进时间占比多就快
核心代码:
//main.c
extern char speed;
void main()
{
Time0Init();
//UartInit();
while(1){
speed = 10;//10份单位时间全速运行,30份停止,所以慢,20ms是40份的500us
Delay1000ms();
Delay1000ms();
speed = 20;
Delay1000ms();
Delay1000ms();
speed = 40;
Delay1000ms();
Delay1000ms();
}
}
//time.c
#include "motor.h"
#include "reg52.h"
char speed;
char cnt = 0;
void Time0Init()
{
//1. 配置定时器0工作模式位16位计时
TMOD = 0x01;
//2. 给初值,定一个0.5出来
TL0=0x33;
TH0=0xFE;
//3. 开始计时
TR0 = 1;
TF0 = 0;
//4. 打开定时器0中断
ET0 = 1;
//5. 打开总中断EA
EA = 1;
}
void Time0Handler() interrupt 1
{
cnt++; //统计爆表的次数. cnt=1的时候,报表了1
//重新给初值
TL0=0x33;
TH0=0xFE;
//控制PWM波
if(cnt < speed){
//前进
goForward();
}else{
//停止
stop();
}
if(cnt == 40){//爆表40次,经过了20ms
cnt = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s
}
}3.通过PWM控制小车转向
原理: 左轮定时器0调速,右轮定时器1调速,那么左转就是右轮速度大于左轮!
在main函数中,同时给左右轮速度,一快一慢,从而实现左前右前进
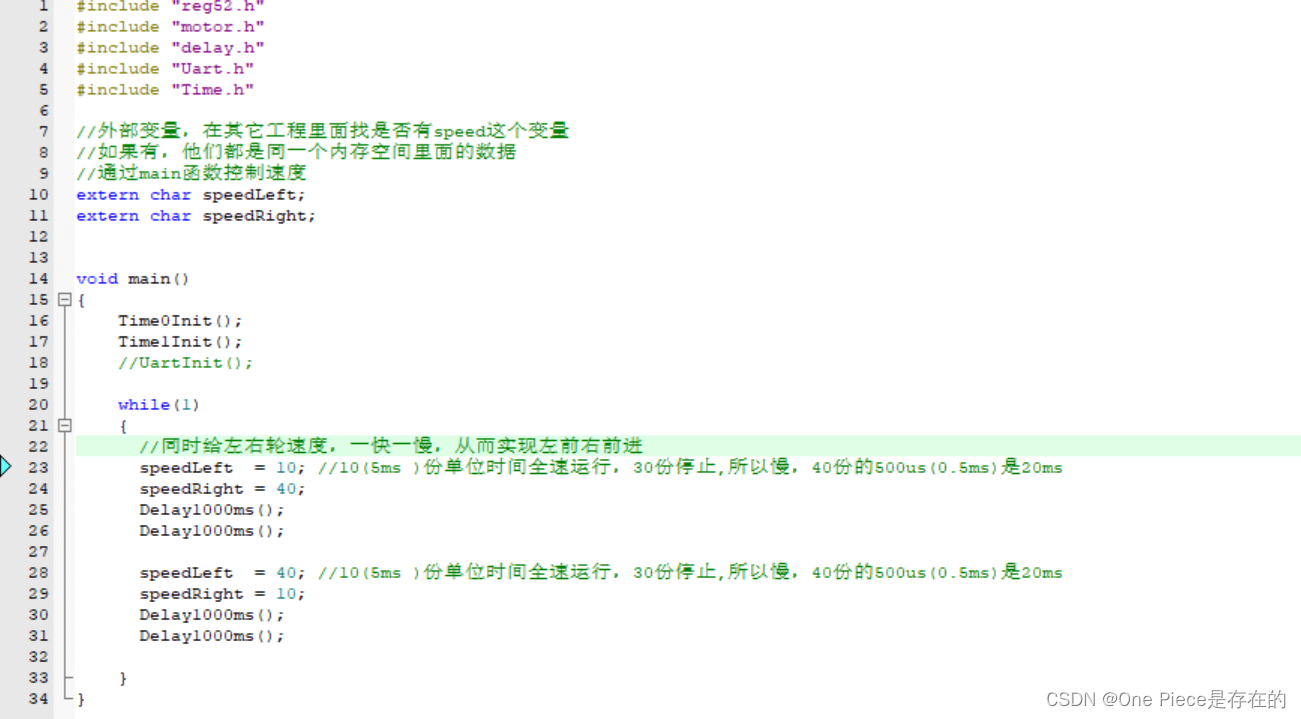
void main()
{
Time0Init();
Time1Init();
//UartInit();
while(1){
speedLeft = 10;//10份单位时间全速运行,30份停止,所以慢,20ms是40份的500us
speedRight = 40;
Delay1000ms();
Delay1000ms();
speedLeft = 40;
speedRight = 10;
Delay1000ms();
Delay1000ms();
}
}
//time.c
#include "motor.h"
#include "reg52.h"
char speedLeft;
char cntLeft = 0;
char speedRight;
char cntRight = 0;
void Time1Init()
{
//1. 配置定时器1工作模式位16位计时
TMOD &= 0x0F;
TMOD |= 0x1 << 4;
//2. 给初值,定一个0.5出来
TL1=0x33;
TH1=0xFE;
//3. 开始计时
TR1 = 1;
TF1 = 0;
//4. 打开定时器1中断
ET1 = 1;
//5. 打开总中断EA
EA = 1;
}
void Time0Init()
{
//1. 配置定时器0工作模式位16位计时
TMOD = 0x01;
//2. 给初值,定一个0.5出来
TL0=0x33;
TH0=0xFE;
//3. 开始计时
TR0 = 1;
TF0 = 0;
//4. 打开定时器0中断
ET0 = 1;
//5. 打开总中断EA
EA = 1;
}
void Time1Handler() interrupt 3
{
cntRight++; //统计爆表的次数. cnt=1的时候,报表了1
//重新给初值
TL1=0x33;
TH1=0xFE;
//控制PWM波
if(cntRight < speedRight){
//右前进
goForwardRight();
}else{
//停止
stopRight();
}
if(cntRight == 40){//爆表40次,经过了20ms
cntRight = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s
}
}
void Time0Handler() interrupt 1
{
cntLeft++; //统计爆表的次数. cnt=1的时候,报表了1
//重新给初值
TL0=0x33;
TH0=0xFE;
//控制PWM波
if(cntLeft < speedLeft){
//左前进
goForwardLeft();
}else{
//停止
stopLeft();
}
if(cntLeft == 40){//爆表40次,经过了20ms
cntLeft = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s
}
}