目录
[一、存储器的基本概念 80](#一、存储器的基本概念 80)
1)存储容量存储容量)
2)单位成本单位成本)
3)存储速度存储速度)
[二、主存的基本组成 87+89](#二、主存的基本组成 87+89)
[三、SRAM vs DRAM 86](#三、SRAM vs DRAM 86)
[1)破坏性读出 and 需要再生](#1)破坏性读出 and 需要再生)
1)集中刷新集中刷新)
2)分散刷新分散刷新)
3)异步刷新异步刷新)
[1)非破坏性读出 不需要重生](#1)非破坏性读出 不需要重生)
[四、ROM (Read-Only Memory) 88](#四、ROM (Read-Only Memory) 88)
[1.MROM(Mask) 掩模式·····](#1.MROM(Mask) 掩模式·····)
[2.PROM(Programable) 一次可编程·····](#2.PROM(Programable) 一次可编程·····)
[3.EPROM(Erasable) 可擦除可编程·····](#3.EPROM(Erasable) 可擦除可编程·····)
[(1)UVEPROM 紫外线擦除](#(1)UVEPROM 紫外线擦除)
[(2)EEPROM (E^2PROM) 电擦除](#(2)EEPROM (E^2PROM) 电擦除)
[五、提高主存速度 90](#五、提高主存速度 90)
[2.多模块存储器 90](#2.多模块存储器 90)
[六、主存与CPU之间的连接 101](#六、主存与CPU之间的连接 101)
[七、外存 109](#七、外存 109)
[2.独立冗余磁盘阵列 RAID](#2.独立冗余磁盘阵列 RAID)
[八、固态硬盘 SSD 111](#八、固态硬盘 SSD 111)
[4. vs 机械接盘](#4. vs 机械接盘)
[6. 联系 OS](#6. 联系 OS)
[九、Cache 115](#九、Cache 115)
(3)cpu修改Cache的data,则如何保持与主存中的原data的一致性
[十、主存与Cache之间的映射关系 118](#十、主存与Cache之间的映射关系 118)
[十一、Cache的替换算法 122](#十一、Cache的替换算法 122)
[十二、Cache写策略 123](#十二、Cache写策略 123)
一、存储器的基本概念 80
1.按照层次结构
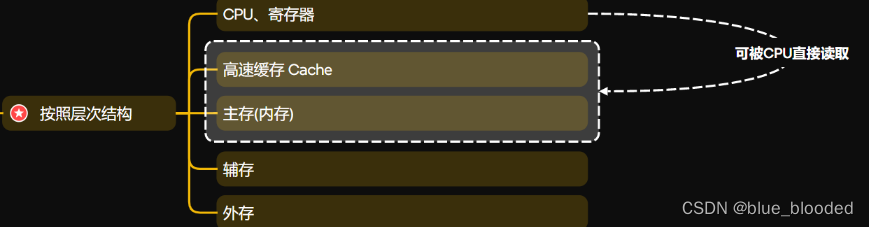
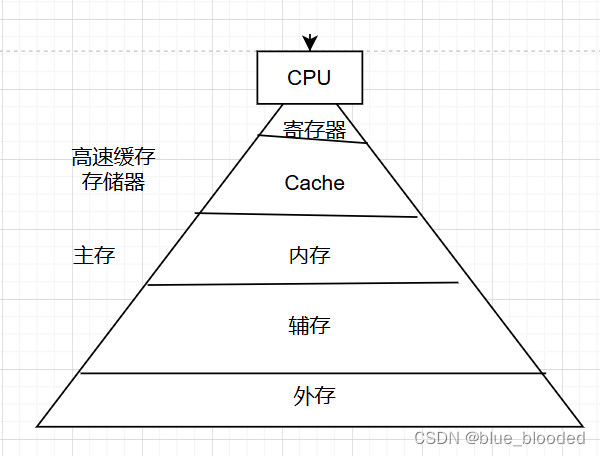

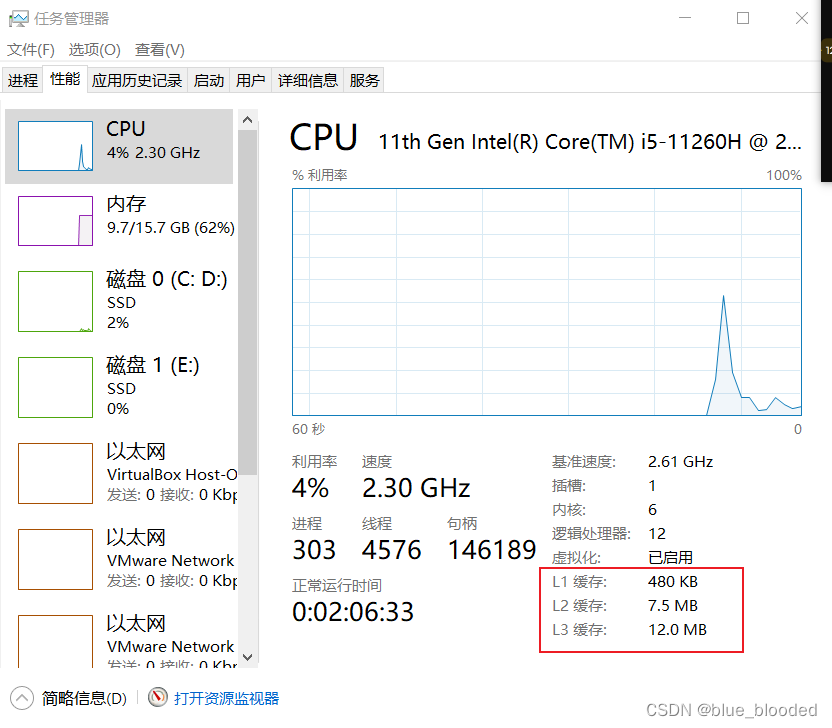
Attn:①寄存器集成在CPU中
②辅存和外存的区分不大
2.按照各种分类

(41)存储介质
半导体:Cache 磁介质:disk、硬盘 光介质:光盘
(2)存取方式
随机存储器(RAM):EPROM、SRAM、DRAM
顺序存取存储器(SAM):磁带
直接存取存储器(DAM):磁盘(SSD) 、光盘 (CD-ROM)
相联存储器(内存存储器)(CAM):快表
只读存储器 (ROM)
ATTN:不要根据东西的名称分,要根据具体内容
(3)内存是否可更改
只能读ROM
可读写else
(4)信息的可保存性
断电是否发生data丢失:易失性存储器
RAM
非易失性存储器:ROM、磁性存储器、光存储器
(5)读出之后data是否破坏
读了之后摧毁data / 不摧毁:破坏性读出 DRAM and 非破坏性输出 SRAM
3.存储器的性能指标
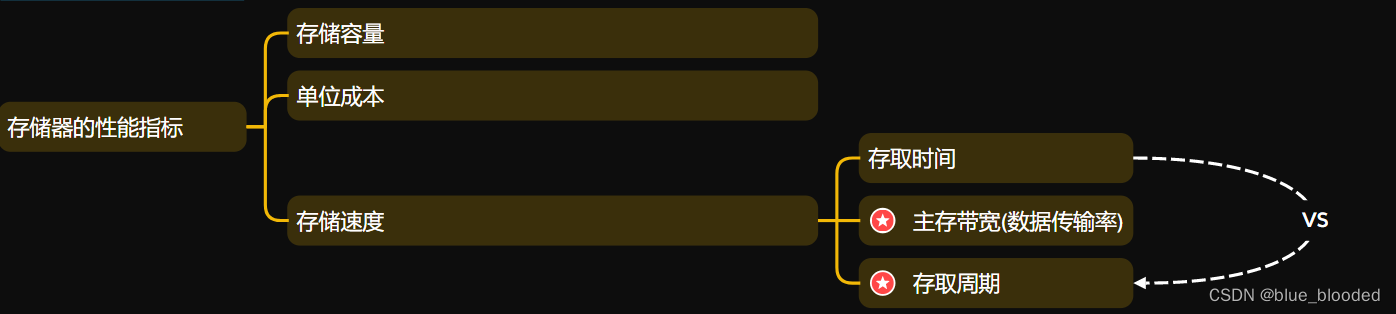
1)存储容量
2)单位成本
每bit价格
3)存储速度
存储时间、存取周期、主存带宽(data传输率)
存储周期 = 存储时间+恢复时间
主存带宽 :每秒读写的data
二、主存的基本组成 87+89
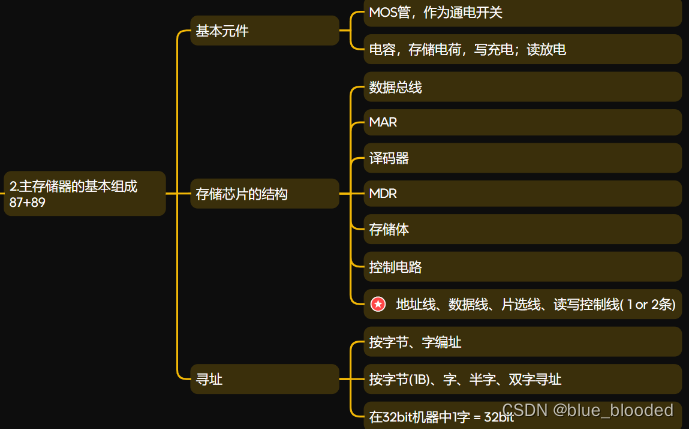
1.基本元件
存储元 : 电容 + MOS管
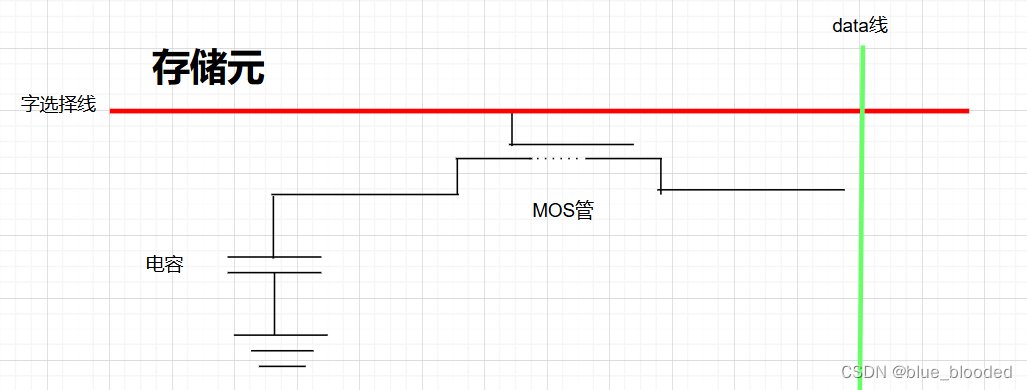
电容存储电荷,写就充电,读就放电
工作原理:根据高低电平(电荷)
因为电容这边接地,为0V,so用高电平的时候MOS导电,电容充电表示1,之后断开MOS管,电荷就保存在了电容中,在另一端读就为1
低电平MOS绝缘,电容还是0V,无电荷0,在另一端读就为0
多个存储元组成存储单元(存储字),多个存储单元组成存储矩阵(存储体)
2.存储芯片的结构
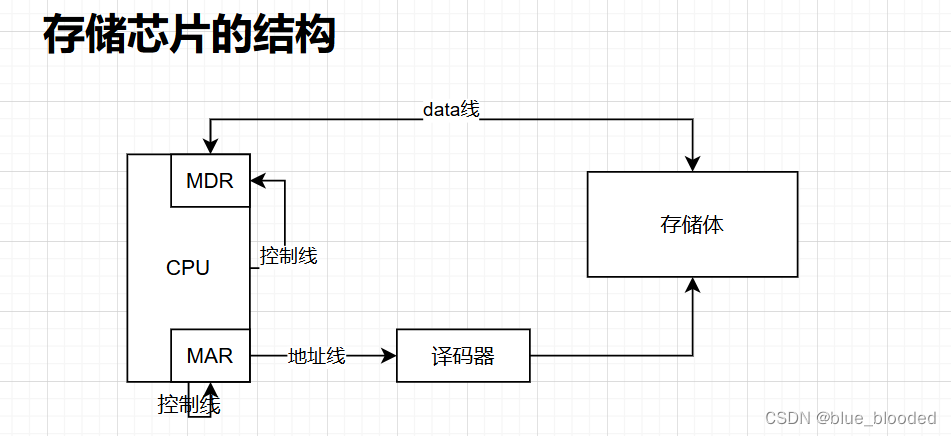
CPU发出指令,通过MAR获取进行读写的内存地址,通过译码器进行选择哪一块存储芯片的读写,读完之后通过data线送到MDR中,整体过程由CPU控制
MAR存储nbit数据,则译码器就有2^n个存储单位
读写控制线可以由一条or两条线组成
①一条 WE (有上划线) 低写高读
②两条线 WE (有上划线)写 OE(有上划线)读
片选控制线:选择读写内存中的那一块存储芯片上的data,低电平确定
CS (有上划线)、CE (有上划线) ,上划线表示低电平激活
3.寻址
按字节or 字编址
按字节 、字、半字、双字寻址
ATTn:在32bit机器中,1字= 32bit = 4B
三、SRAM vs DRAM 86

1.DRAM
(1)工作原理
运用栅极电容存储信息,1个MOS管,即存储元,多个存储元组成存储体
(2)特点
1)破坏性读出 and 需要再生
通过电容充放电进行读写,so读的时候会放电,电容中的电荷没了,so是破坏性读出
放电之后需要重新充电,"再生"
2)需要刷新
即使不重新读写,电荷也会慢慢流失,so需要定期刷新,三种方式
刷新与重生dis:刷新是按行为单位的
3)分两次送行列地址
地址复用技术
(3)DRAM刷新
1)集中刷新
计算出全部刷新需要的时间,则else进行CPU读取,留下这些时间进行全部刷新,这一部分时间称作死区,此时CPU不能读取
2)分散刷新
读一下刷一次,dis:存取周期翻倍
3)异步刷新
计算出全部刷新的时间,将其分布到每个刷新周期之间,这样就分散了死区,cpu不会等待时间过长
(4)DRAM地址复用技术
未使用之前,1条地址线对应1存储元,译码器连着这么多的线,设计比较难,so使用行译码器和列译码器,条数就开方了,并且芯片引脚也减少
2.SRAM
(1)工作原理
使用6个MOS管,so会存储信息
(2)特点
1)非破坏性读出 不需要重生
2)不需要刷新
3)同时送行列地址
四、ROM (Read-Only Memory) 88
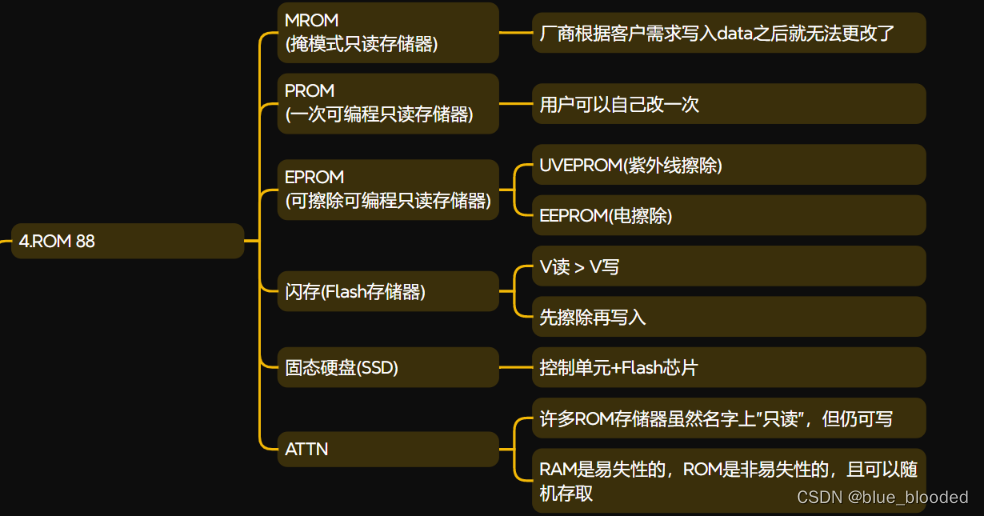
1.MROM(Mask) 掩模式·····
厂家根据用户需求进行设计,之后任何人不能再修改
2.PROM(Programable) 一次可编程·····
用户可DIY,保存之后不能再修改
3.EPROM(Erasable) 可擦除可编程·····
(1)UVEPROM 紫外线擦除
紫外线照射 8~20min
(2)EEPROM (E^2PROM) 电擦除
4.闪存(Flash存储器)
先擦除后写 so V读 > V写
5.固态硬盘(SSD)
控制单元 + Flash芯片
6.ATTN
(1)许多ROM依然可以写
(2)ROM是非易失性的,也可以随机存取
五、提高主存速度 90

1.reason
存取周期 = 存取时间 + 恢复时间
恢复时间占主要时间,且恢复期间cpu无法读写
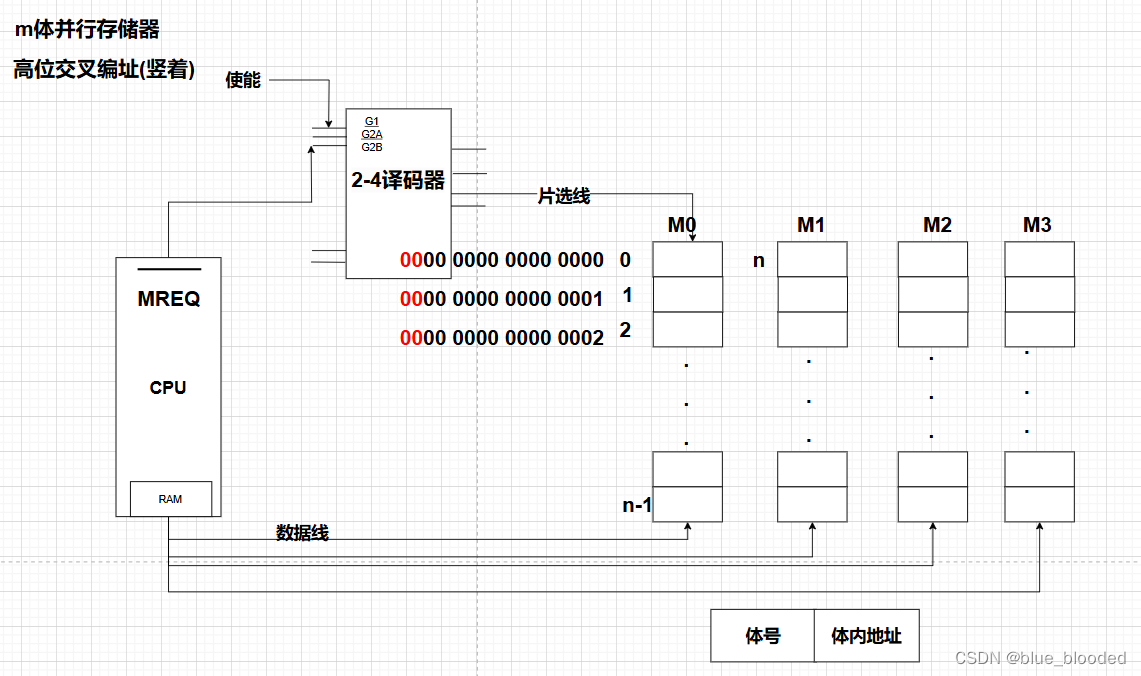
2.多模块存储器 90
(1)多体并行存储器
多体模块(理解成内存条)组成
1)高位交叉编址
体号+体内地址,体号表示选择的是哪一块,体内表示模块内的第几个,"竖着编址"
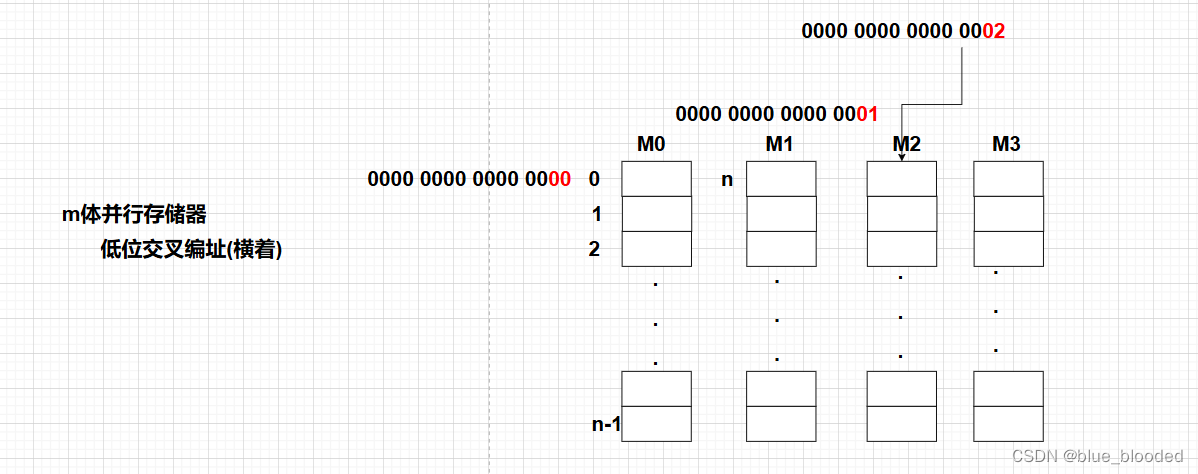
2)低位交叉编址
体内地址+体号,"横着编址"
best 模块数m = 存取周期T/存取时间r
if 想cpu不停止,则 m>= T/r ;m> T/r,模块会有空闲,无法达到最高效,增加成本;m<T/r,cpu仍需等待
一般是进行字扩展,组与组之间串联,由此确定模块的个数
(2)单体并行存储器
将m体模块合并成一个模块,每次并行读出m个连续的字,so每个存储单元存储m个字,总线宽度也为m个字

六、主存与CPU之间的连接 101

1.存储器芯片的基本结构
移码驱动电路+存储体+读写电路+地址线、片选线、数据线、读/写控制线
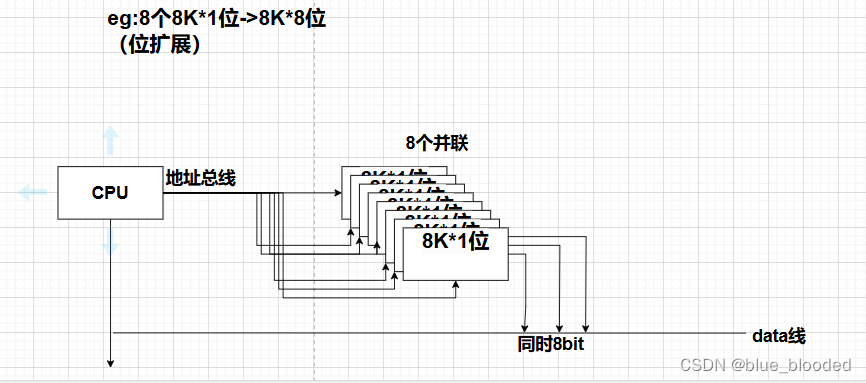
2.位扩展
芯片并联,增加data总路读写的效率
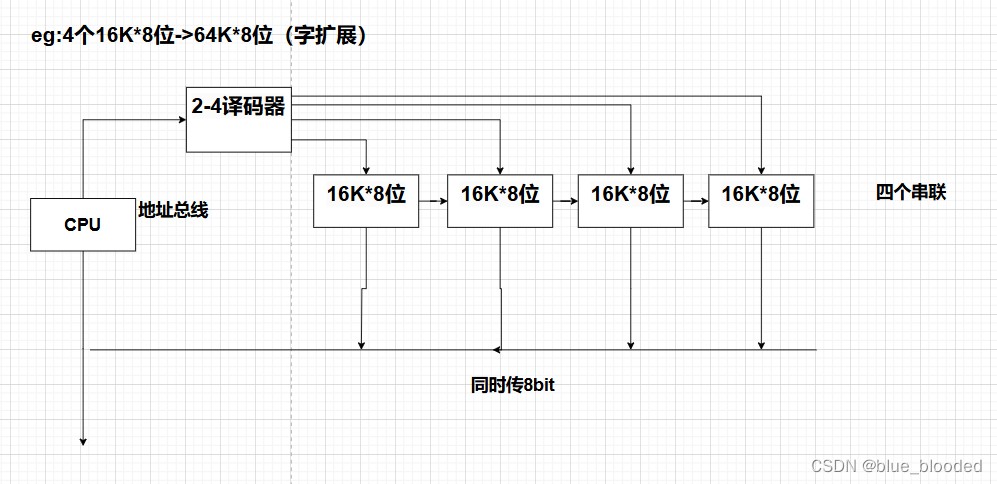
3.字扩展
芯片串联,扩容
(1)线选法
直接连接,1地址线--1芯片(组)
(2)译码片选法
使用译码器,n地址线 -- 2^n 芯片(组)
4.字位同时扩展
结合位扩展+字扩展
七、外存 109

1.disk原理
(1)disk组成
磁盘驱动器、磁盘控制器、盘片
(2)性能指标
1)容量
2)记录密度
道密度、位密度、盘密度
因为每条磁道中data数量相同,so外道密度<内道密度
3)平均存取时间
寻道时间、旋转延迟时间、传输时间
4)data传输率
磁盘存储器再单位时间内想主机传送data的字节数
Dr = rN (转速 * 每条磁道容量)
(3)硬盘地址
柱面扇
2.独立冗余磁盘阵列 RAID
因为 数据总线发送data时只能1bit的发,so用串-并交换电路,能同时nbit
实现:多个独立的物理disk组成一个独立的逻辑盘
RAID的应用是在实现手段,安全性差距,等级越大越安全
(1)RAID0
无冗余的,无校验的磁盘阵列,(类比低位编址的多体存储器)
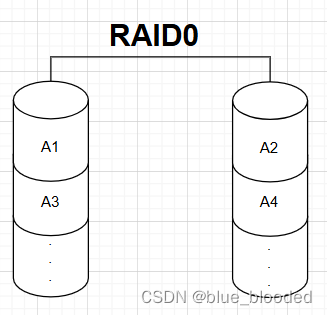
disa:不能检验,错了就错了
(2)RAID1
镜像磁盘阵列(有冗余,有检验)
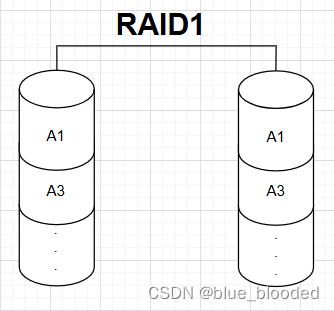
disa:冗余50%,检验就比较另一份
(3)RAID2
采用可以纠错的海明码的磁盘阵列,,采用k位disk和n位海明校验码
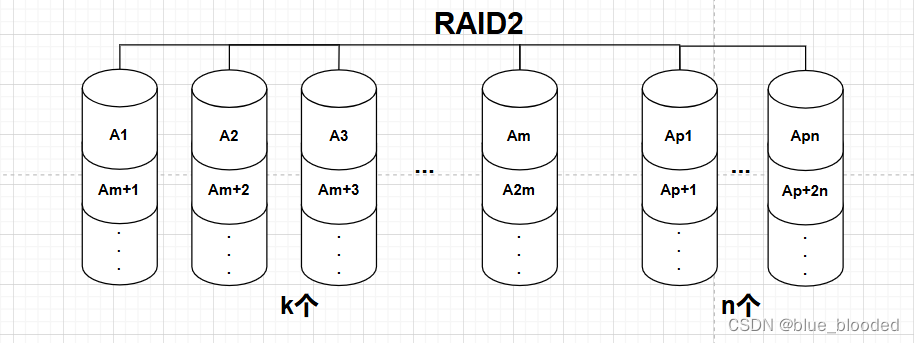
eg:4个disk则最少需要3位海明校验码
reason:k+n位最多表示2^(k+n) -1种错误,有一种是没错
so 2^(k+n) -1 >= k+n
参考视频:
(4)RAID3~RAID5(了解)
八、固态硬盘 SSD 111

1.原理
闪存技术 、可电擦除
2.组成
闪存翻译层 + Flash Chips
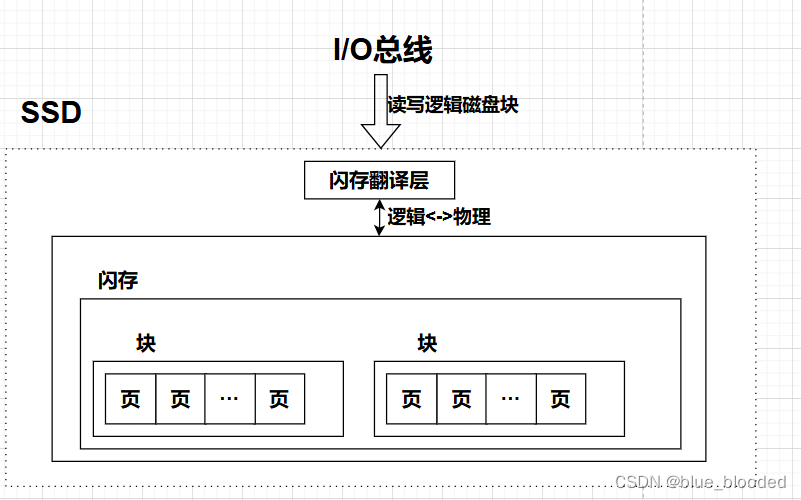
3.读写性能
以页为单位读写(类比disk的块)
以块为单位进行擦除,擦完之后才能写,即使块中有空页,也不能写
支持随机访问
4. vs 机械接盘
SSD快、安静、贵,擦除次数太多就坏了
5.磨损均衡技术
因为擦除太多会损坏,so采用方法
(1)动态擦除 --选擦除次数min
(2)静态擦除 -- 读写需求大的使用擦除次数少的,只读的使用擦除次数多的
6. 联系 OS
九、Cache 115
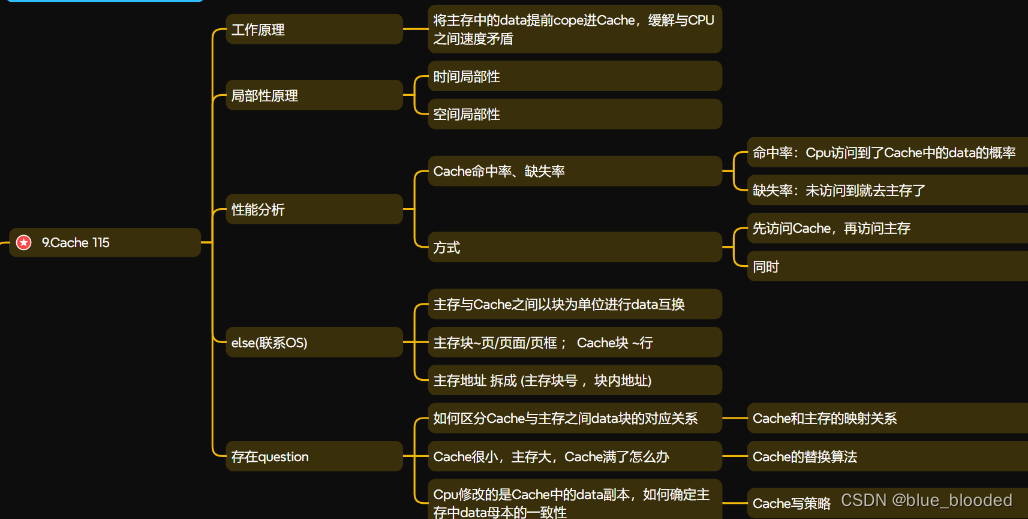
1.工作原理
SRAM构建,将主存中的部分data先拷贝到Cache中,缓解CPU和主存之间的速度矛盾
2.局部性原理
时间和空间
3.性能分析
(1)Cache命中率、缺失率
Cache命中率 :CPU访问Cache的概率
H = Nc /(Nc +Nm)
平均访问时间Ta= Htc + (1-H)(tc+tm) 先访问Cache再主存
平均访问时间Ta= Htc + (1-H)tm 同时访问
(2)方式
先访问Cache再主存;同时Cache 和主存
4.else(联系OS)
5.存在的question
(1)Cache与主存中data块的对应关系
Cache与主存之间的映射关系
(2)Cache块小,满了咋办
Cache替换算法
(3)cpu修改Cache的data,则如何保持与主存中的原data的一致性
Cache写策略
十、主存与Cache之间的映射关系 118

1.Cache存放data格式
有效位+标记+整块data
有效位表示data是否有效,∵全0也可表示具体data
标记表示data在内存中的pos
2.全相联映射
随便放,有空就行
主存地址 = 块号 + 块内地址
adv:空间利用充分
disa:确定data在内存中的位置较慢
3.直接映射
地址号 mod 块号 ,位置唯一
映射到的块号 = 内存地址低位c
c = log2Cache块数
4.组相连映射
先将Cache块进行分组,然后直接映射入组,组内随意放空地方
十一、Cache的替换算法 122

1.随机算法(RAND)
当Cache满了之后,if有新的内存块要访问,随机替换一个Cache行中的data
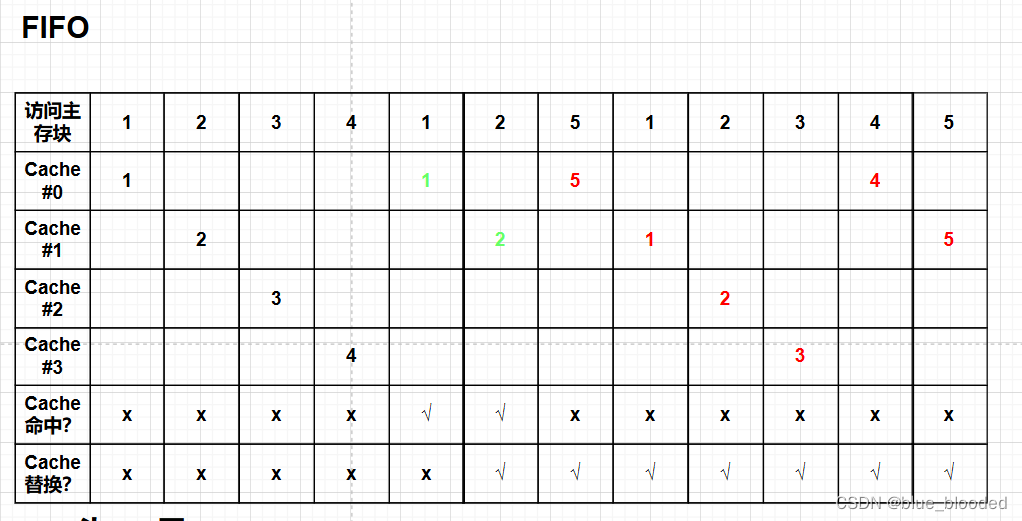
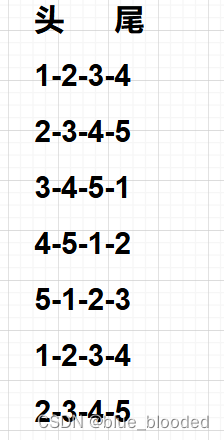
2.先入先出(FIFO)
eg:4个Cache行,依次访问1,2,3,4,1,2,5,1,2,3,4,5主存块
绿色表示命中,红色代表替换,(中间相同ele省略)
tip 使用辅助队列
由图中后半部分发现频繁替换,称作抖动现象
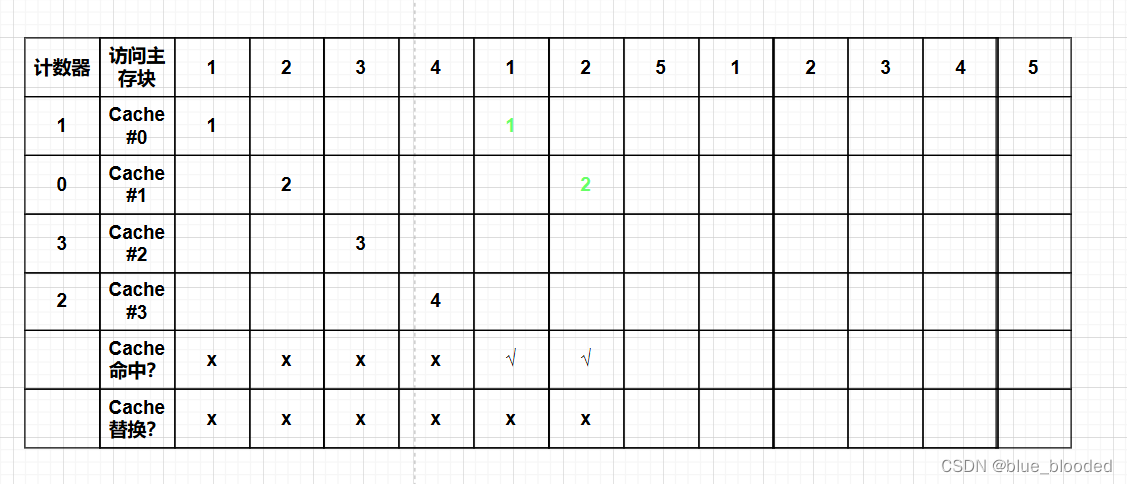
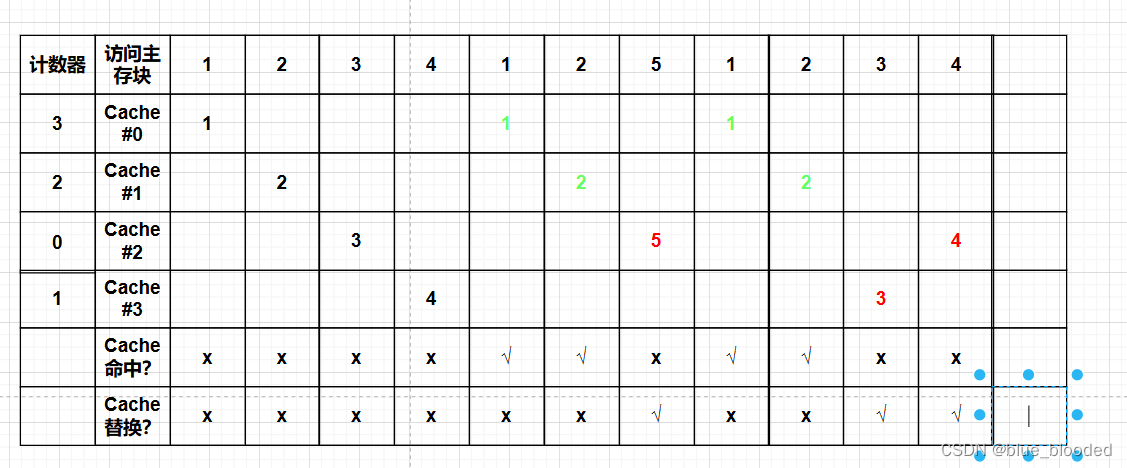
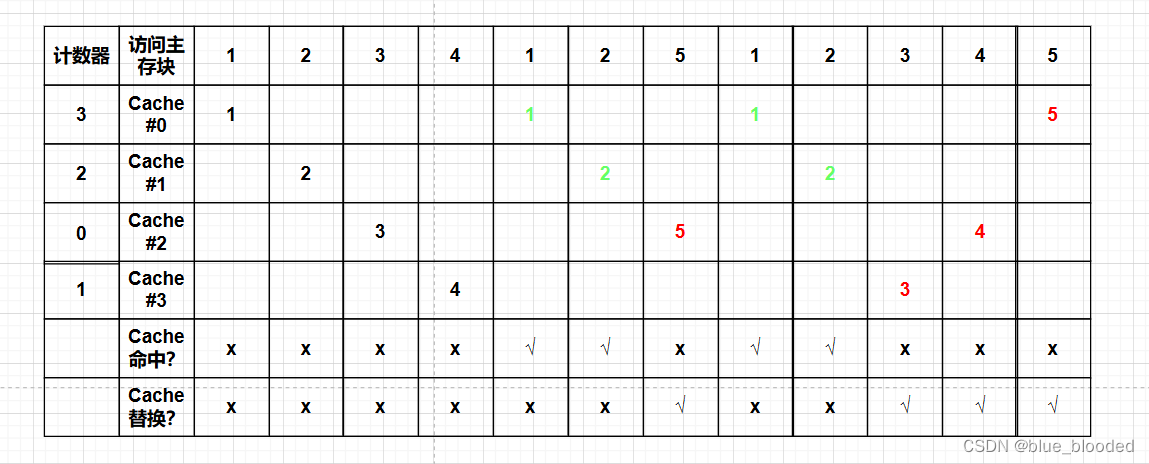
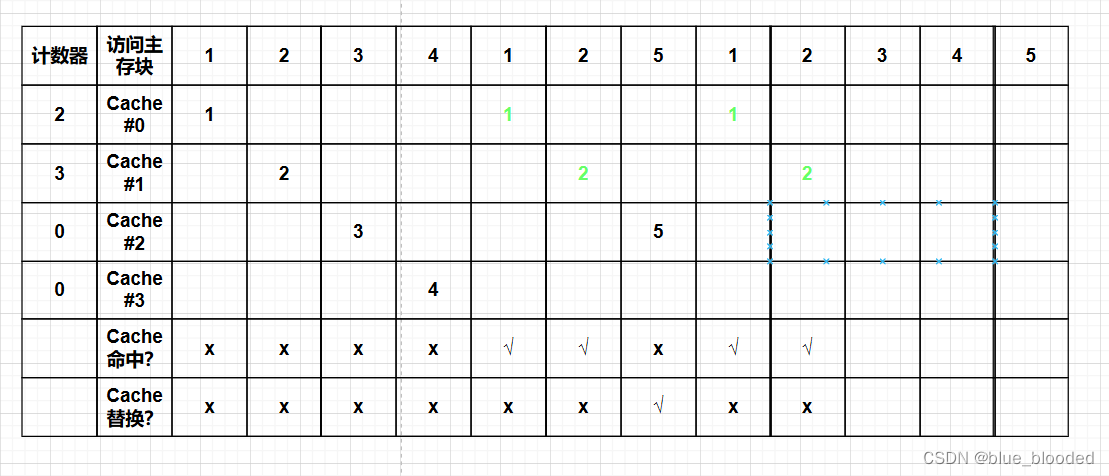
3.最近最少使用算法(LRU)
替换在访问的前几个中没有使用的那一个
(1)手算
往前看,差1个

(2)机器
使用计数器,计数器表示已经几次没有访问该Cache行了,if命中,该块对应清0,else+1;if未命中,有空行,填入Cache,else+1,无空行,找max,剔除,该行置0,else+1
分步解析

此时Cache满了
到5应该替换3,此行置0,else+1
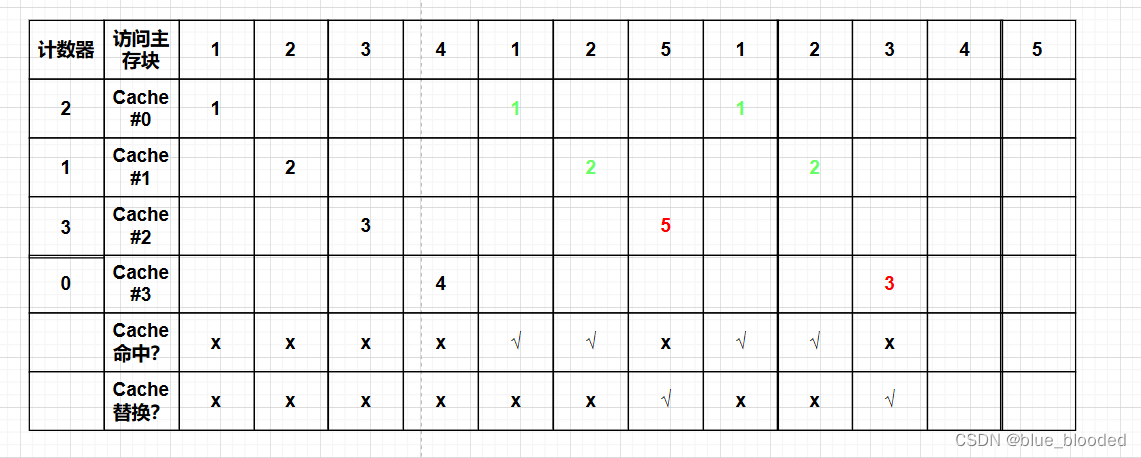
到了3,替换4
到了4,此时最大5,count=3,替换5
到了5,此时最大1,count=3,替换1
4.最不经常使用算法(LFU)
全局不常用,使用计数器,表示该行Cache访问次数。每次访问一个,if为空,放入Cache行,count+1,if不空,命中,+1,未命中,替换min,if有同,FIFO or 行数小的
逐步分解(先换行号小)
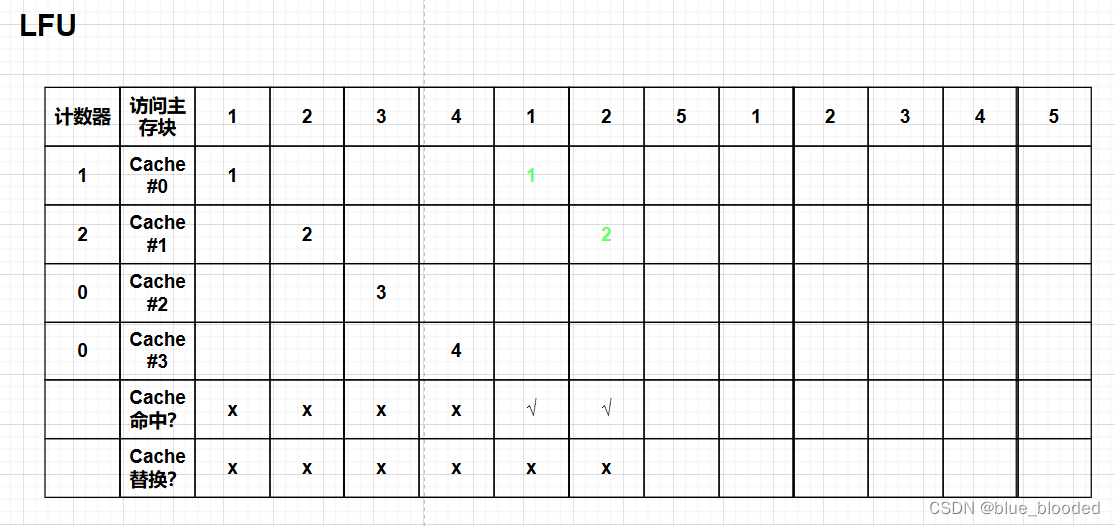
此时3Cache2 、3小,5替3
此时3替5
十二、Cache写策略 123
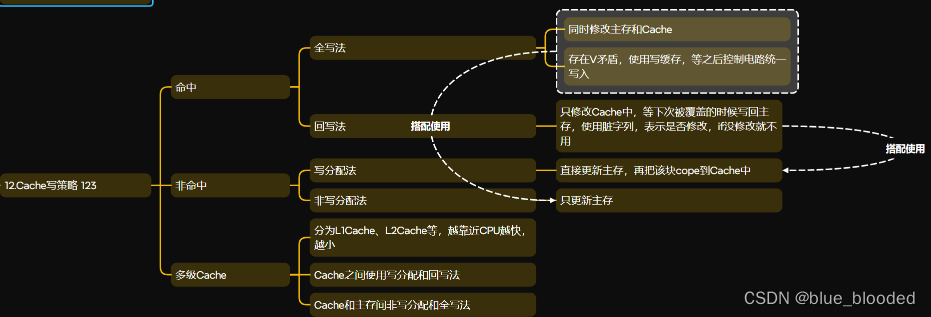
1.命中
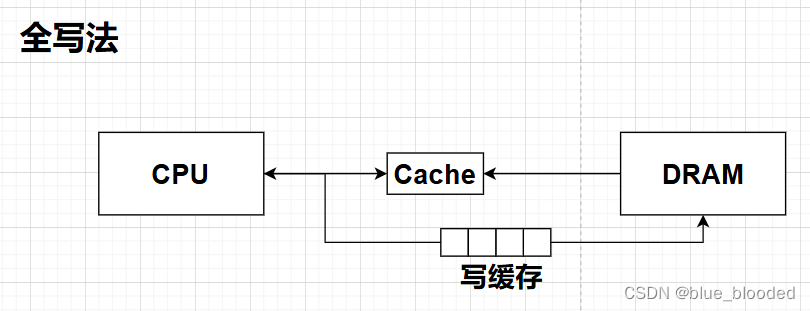
(1)全写法
同时修改主存和Cache,存在速度矛盾,so使用写缓存,等止呕控制电路一块写入
(2)回写法
写入Cache,等Cache中该块被替换时,写入主存
2.未命中
未命中说明去主存中寻找,根据将data放不放入Cache进行分
(1)写分配法
放入Cache
(2)非写分配法
不放入Cache
Attn:非写分配法不放入Cache,全写法全修改,就不需要从主存放入Cache中了,so搭配使用
写分配 和 回写法搭配使用
3.多级Cache
再将Cache进行分级,级越高离CPU越近,容量越小,速度越快