目录
1 、什么是数据挖掘
数据挖掘是从大量数据中发现隐藏在其中的模式、关系和规律的过程。它利用统计学、机器学习和数据库技术等工具和方法来分析大规模数据集,以发现其中的信息,并将其转化为可用的知识或决策支持。数据挖掘常用于预测、分类、聚类和关联规则发现等任务。
2 、为什么要有数据挖掘
数据挖掘的出现是为了解决大规模数据中存在的隐含信息和规律,并将其转化为可用的知识或决策支持。
3、数据挖掘主要任务
通过数据挖掘技术,可以从大规模数据中挖掘出有用的信息和知识,为决策提供支持和指导,发现数据中的潜在规律和趋势。
4、数据分析步骤
5、数据挖掘用在分类任务中的算法
朴素贝叶斯算法
朴素贝叶斯是一组基于贝叶斯定理的监督学习算法。
**先验概率:**基于统计规律,基于以往的历史经验和分析得到的结果,不依赖于当前发生的条件。
**后验概率:**由条件概率推理而来,由因推果,是计算在发生某事之后的概率,依赖于当前发生的条件。
**条件概率:**记事件A发生的概率为P(A),事件B发生的概率为P(B),则在事件B发生的条件下事件A发生的概率为P(A|B),
而贝叶斯公式就是基于条件概率,通过P(B|A)求解P(A|B) ,如下:
由联合公式可以推导如下,
P(A)和P(B)分别为先验概率 ,P(A|B)和P(B|A)分别为后验概率 ,P(A,B)则称为联合概率。
全概率公式 :表示若事件构成一个完备事件组且都有正概率,则对任意一个事件B都有公式成立,故有:
机器学习的最终目标就是回归或者是分类,都可以看为是预测,分类则是预测属于某一类的概率是多大,因此可以把上述贝叶斯表达式中的A看成是属于某类的规律,把B看成是具有某种特征的现象,那么贝叶斯公式又可以表示为:
朴素贝叶斯算法的原理:
特征条件假设:若假设各个特征之间没有联系,给定训练数据集后,每个样本都是n维特征,,类别标记中有m种类别,
。
朴素贝叶斯算法对条件概率分布做出了独立性的假设 ,即个人维度上的特征相互独立,那么在此假设前提下,条件概率可转化为:
朴素贝叶斯算法是一组基于贝叶斯定理的监督学习算法,朴素贝叶斯算法通过预测指定样本属于特定类别的概率来预测该样本的所属类别,即:

可以写为,
 其中,
其中,对应为样本的特征向量,p(x)为样本的先验概率,对于特定样本x和任意类别yi,P(x)的取值均相同,并不会影响P(yi|x)取值的相对大小,因此在计算中可以被忽略 (求解P(yi|x)就相当于求解P(x|yi)P(yi))。"朴素"特别之处就在于假设了特征
相互独立,由此可以得到:

上述等式的右边即为连乘,将等式右边的概率称为判定函数 。它的结果值不仅仅是代表概率,代表着判定值,,以及
均可以通过训练样本统计得到,最后的目标函数如下,

但是由于概率值为0,1的数,作连乘运算时,容易让最后的结果越来越趋近于0(数据下溢),故对其取log是一个常用的手段,并根据log(xy)=log(x)+log(y)将其转换为相加的形式,

这样仅能预测出最后对应的最大的判定值,将上式中的max更改为argmax即可求出最大判定值所对应的类别。
svm支持向量机算法
支持向量机(Support Vector Machine,SVM)本身是一个二分类算法,是对感知器算法模型的一种扩展,现在的SVM算法支持线性分类和非线性分类的应用,并且也能通过将SVM应用于回归应用中,在不考虑集成学习算法,不考虑特定数据集时,分类算法SVM是非常优秀的。
支持向量:离分割超平面最近的那些点。
间隔:数据点到分割超平面的间距。
首先介绍一下感知器模型,感知器的思想就是在数据是线性可分(能找到一个平面将两组数据给分开)的前提下任意空间中,感知器需要寻找一个超平面,能够把所有的二分类别分割开。
感知器模型如下,目标是找到一个为0的超平面,然后分别根据神经元的加权求和的结果判断,大于0的为一个类别,小于0的为一个类别,因此,期望分类错误的样本离超平面的距离之和最小,从而让分类错误的样本更快地朝着正确的方向进行更新,从而让训练成功。


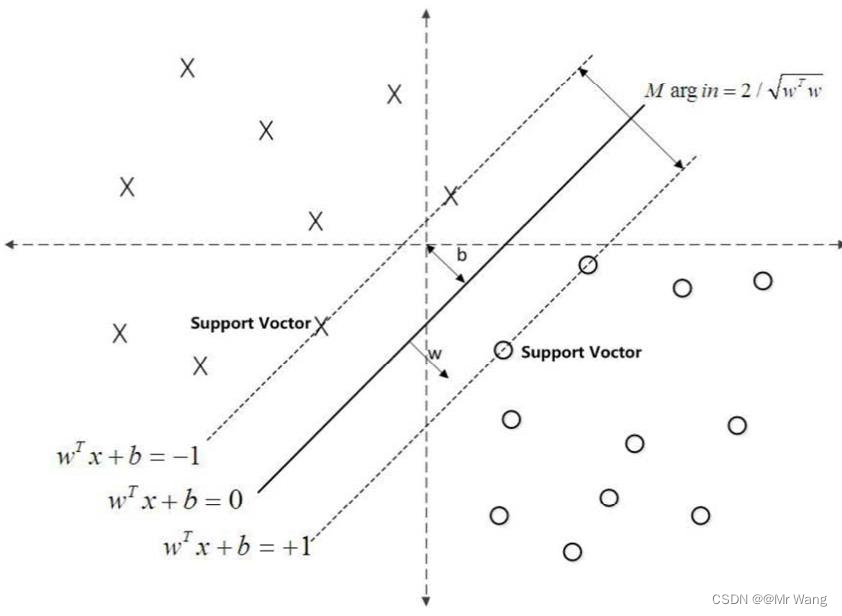
然后就是SVM算法,为什么感知器算法缺陷呢,下图中两条直线分别为感知器算法的超平面,它比较关注的是让所有的点离超平面尽可能的远,但实际上离超平面足够远的点基本都是被正确分类的,所以这个是没有意义的,反而应该关注那些离超平面很近的点,这些点才容易出错。如果测试时来了一个新的数据点(样本),并位于这两条蓝色直线之间,那么就不能很好的处理这个新的数据,由此引入了SVM支持向量机算法。

也就是说,如下图所示,希望 找到一个最好的w和b固定一个超平面,使得这个超平面在能够完美的区分正负例(分类)的基础上,找到距离最近的点间隔最大。(后面的证明过程先不叙述,涉及到拉格朗日优化目标函数过程)
PCA主成分分析算法
PCA是一种线性降维方法,他的思想主要是依靠将数据从高维空间映射到低维空间,同时在低维空间里的数据的方差被最大化。
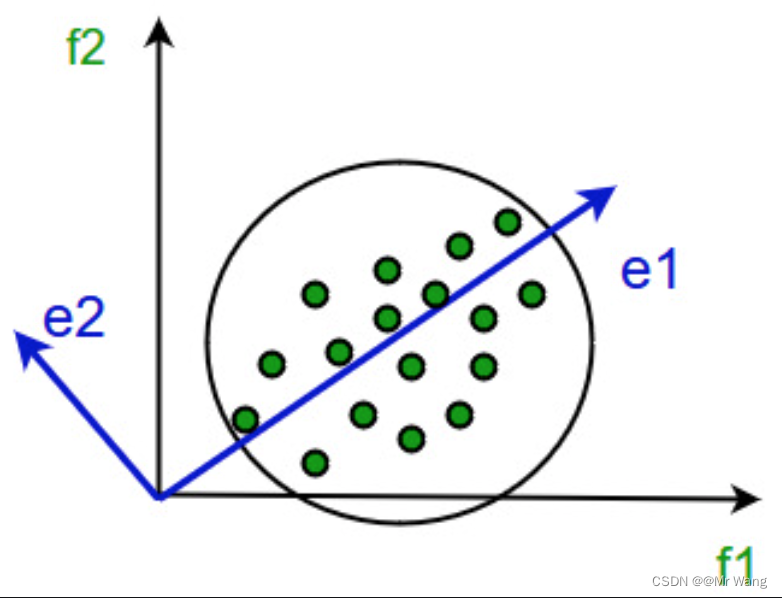 图1
图1
算法步骤:
- 建立数据的协方差矩阵
- 计算矩阵的多个特征向量
- 对应有最大几个特征值的特征向量被应用于重新建立数据,这样就会使新建的数据包含有大量原本数据的方差(信息量)。
主要包含最大投影方差和最小投影距离两种方法证明PCA的有效性,下面用最大投影方差的方法证明一下。
最大投影方差(证明)
数据的离散性越大,代表数据在所投影的维度具有更高的区分度,这个区分度(方差)就是信息量,我们希望降维之后还能更多的保留原来的信息量,而且降维后不同维度的相关性为0,这样即使是去掉某些相对不重要的维度也不会干扰到剩余的维度信息。
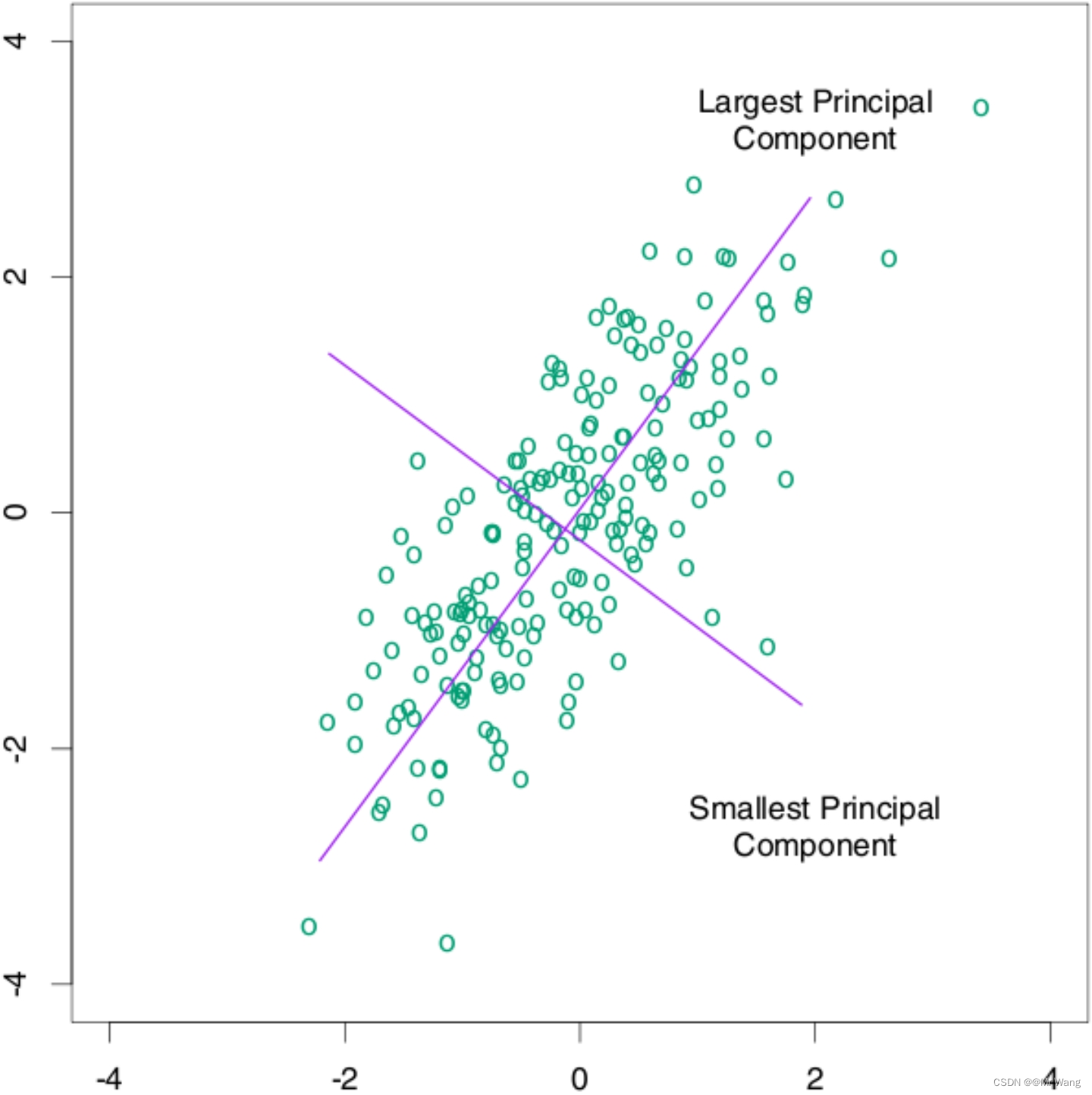 图2
图2
如图2所示,使用PCA主成分分析,并不会改变原始数据的分布,只是换个角度解决问题,本质上相当于是重新定义坐标系,找到一个更好的角度去审视数据。如图2,举个例子,对于同一数据分布,原坐标系横轴纵轴比例为(5:5)1:1,采用等长的横纵坐标,但经过重新找定坐标系(图2中紫色),新的坐标系横纵轴比例可能为7:3,那这样的话,采用主成分分析PCA,选取占比70%这条轴线进行降维,这就可以在降维的同时保留较大的信息量。
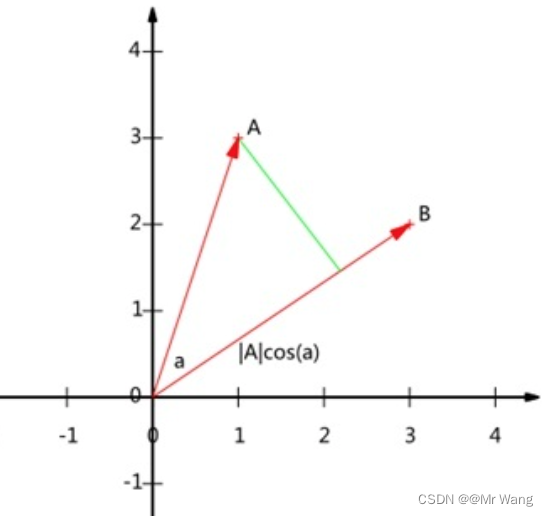 图3
图3
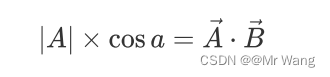
既然希望用样本点投影的方式希望投影之后的数据点会有更大的方差,那么不妨把投影之后的数值表达出来,如图3中的一个数据点A(x1,y1),将原点O与其的连线构成的向量A投影到向量B所在的方向上,得:

那既然这样的话,单位向量不也能表示方向吗,让B为单位向量,|B|=1,可由上式推出,
投影之后的新坐标系,每个轴用单位向量表示,新坐标系设置为标准正交基;即既保证了每个主成分向量wi的模为1,即
,又保证了各个主成分之间互不干扰(不叠加、不覆盖),
。
对于任意一个点xi投影到某个坐标轴w上,则投影后的值为。

由上面的方差公式可以推出,
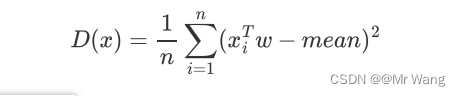
其中,mean表示投影后的均值。
又因为PCA会对未投影前的原始数据进行标准归一化操作:
- 均值归一化/中心化:经过如下证明得投影后的mean也为0.
- 方差归一化:即为无量纲化,归一到某范围内,这样在投影之后方差不会受到某些维度的主导。

故将mean=0带入计算方差的式子中得,
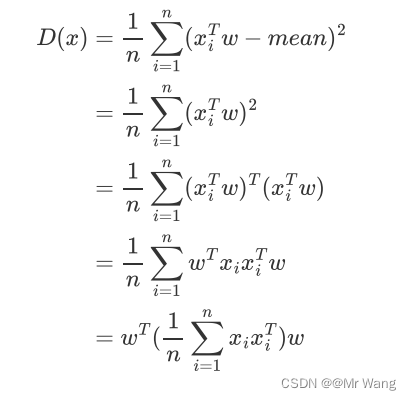
注意,在前面是两个向量的内积运算,在上述式子中,xi被看成为一个列向量,因此
((m*n)*(n*m)=m*m),接着把上面的每个样本点运算求和转换为原始数据X(shape:d*n,d指原始数据维度,n代表原始数据的样本数),得
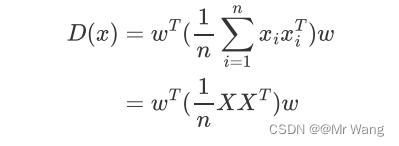
接着代入协方差(用来衡量两个随机变量之间关系的统计量,通过计算变量之间的协方差矩阵,可以找到数据中最具代表性和最重要的方向(主成分))公式中得,
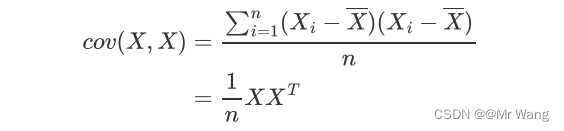
若将协方差矩阵用符号表示,则优化目标最大化投影后方差等价于,

然后按照构建拉格朗日函数,g(x)为约束条件,引入拉格朗日乘子lamda,这样就把具有约束条件的最优问题转化为无约束条件的最优化问题,对w求偏导得,

这样就可以看出,w是 的特征向量,lamda是对应特征向量的特征值,最大化投影后的方差,等价于
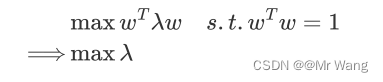
这样一来,要寻找的第一主成分就是使得投影方差最大的坐标轴就是最大特征值对应的特征向量。最终保留几个维度,就按照大小顺序选取前几个最大的特征值对应的特征向量,然后把原始数据进行投影即可,比如取出前k个大的特征值对应的特征向量w1,w2,...,wk,通过以下映射将d维样本降低到k维度,
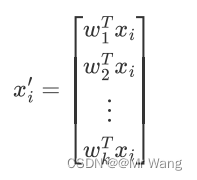
如此一来,新的的第j维就是xi在第j个主成分wj方向上的投影,如果通过选取最大的k个特征值对应的特征向量,将方差小的特征抛弃,使得每个d维列向量xi被映射为k维列向量xi',
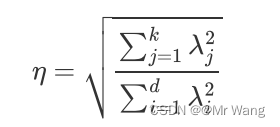
和
为对应维度上的方差,那么定义降维后的信息占比如下,可以反过来通过
决定该选择保留下多少维度:
k-means算法
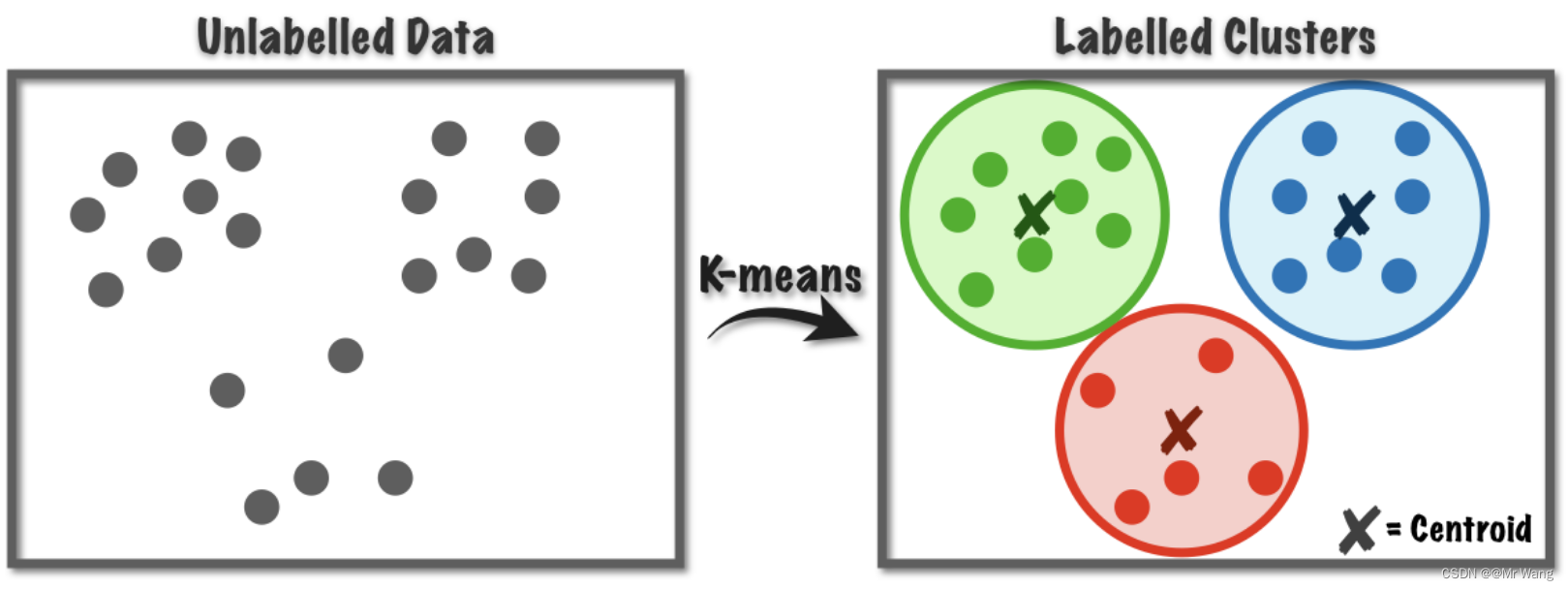
聚类算法是一种无监督学习的方法,用于将数据集中的对象按照特征的相似度或者距离进行分组,并且每个分组被称为一个簇。聚类即是让同一个簇内的样本相互之间更加相似,而不同的簇之间差异较大。
(了解)监督学习则是指模型根据已知的输入输出关系学习一个映射函数,以便于对新的数据进行预测或分类。在监督学习中,训练数据集包括带有标签的样本数据对(样本加标签)。这些标签可以是已知的正确输出(回归问题)或事先定义好的类别样本(分类问题)。
K-Means算法又称K均值算法,属于聚类算法的一种。聚类算法就是根据相似性原则,将具有较高相似度的数据对象划分至同一类簇,将具有较高相异度的数据对象划分至不同类簇,简而言之,就是把一些没有标签(label)的数据通过聚类算法打上标签分为不同的组/簇。
聚类与分类的最大区别就是在于聚类属于无监督过程(处理事务无先验知识),而分类过程为有监督过程(存在有先验知识的训练数据集)。
最优的划分其实也就是最优的中心点的位置,未来的数据求出其与不同中心点的距离实现对其的预测。
对于预测问题,大体流程如图1所示,
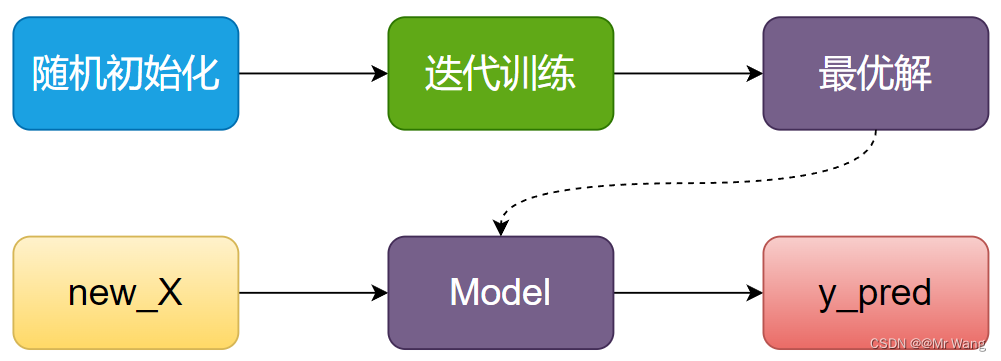 图1 预测算法
图1 预测算法
对于聚类算法,大体的流程如图2所示,
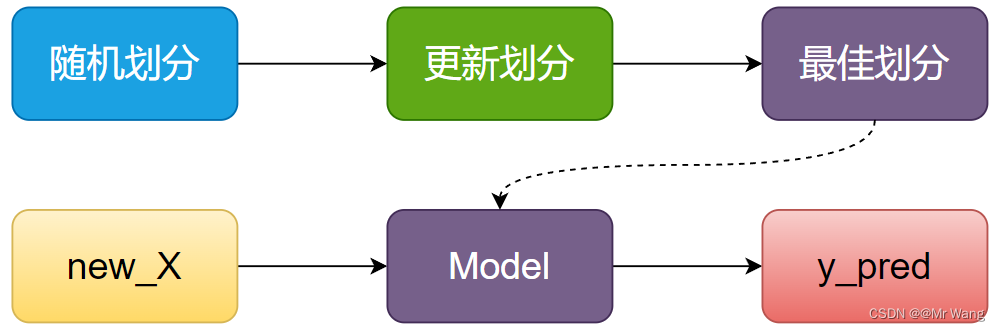 图2 聚类算法
图2 聚类算法
为什么要叫KMeans?因为K代表着最终的簇数量,或者说目标簇数量,需要手动设置,是一个超参数。Means是因为算法过程中需要计算平均值,下面描述一下KMeans的流程,
随机初始化簇中心点个数K
输入:样本
输出:样本所属簇
// 当样本分配到K个簇不再变化时end
While(样本的分配发生改变)
for i=1,2,...,N then do
样本被分配到距离其最近的中心点
根据当前每个簇中的样本更新K个簇中心点:采用平均值计算
end
end决策树
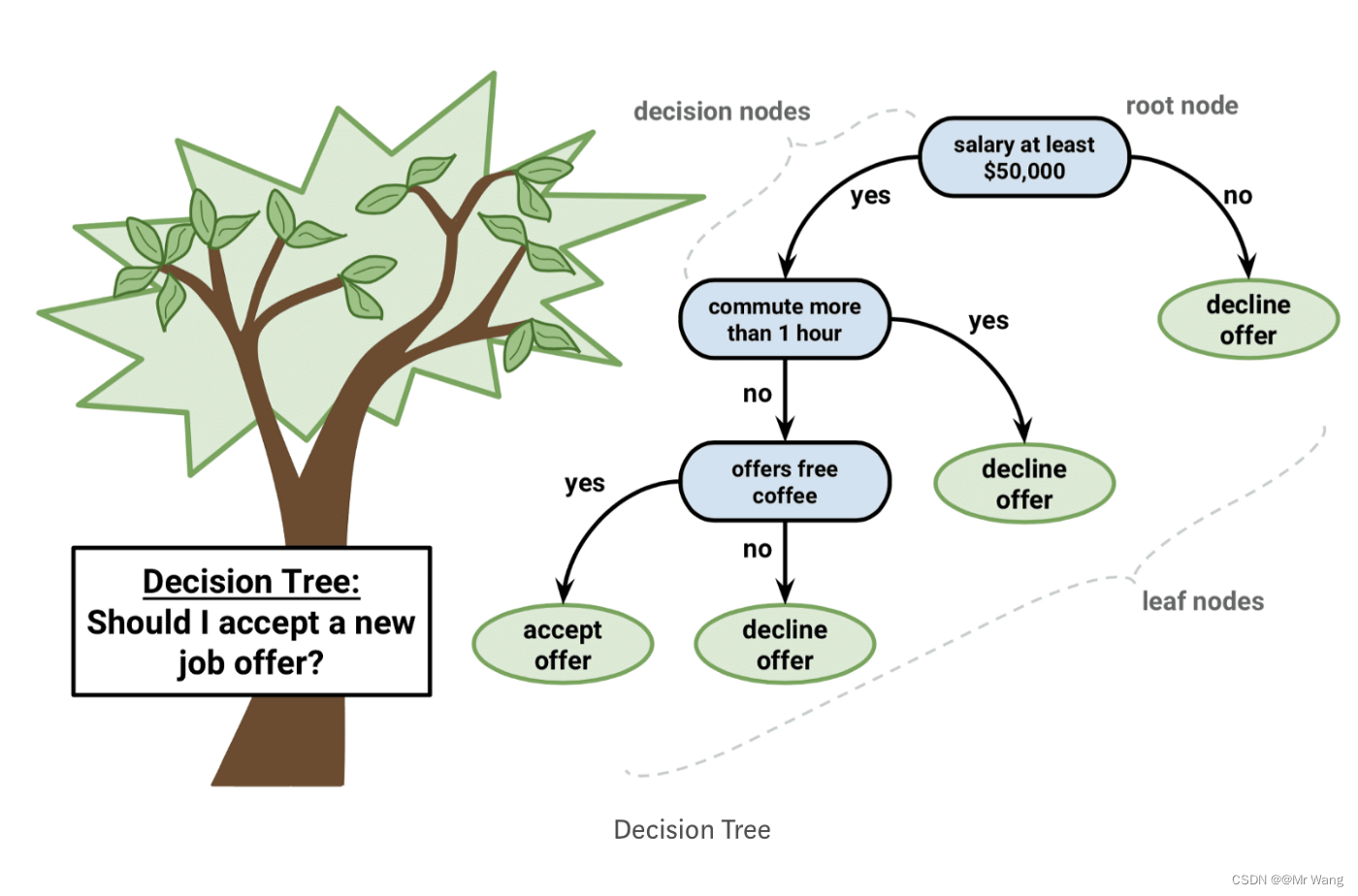
决策树是一种有监督学习,有明确的标签用于划分树的分支,符合直觉且非常直观,非叶子节点均为决策节点,每个叶子节点对应的标签即为对应的样本的预测值。需要知道回归与分类问题的区别,回归针对于连续问题,分类针对于离散问题。
特点:
决策树可以处理非线性问题,可解释性强(无seta参数),模型简单且预测效率高;不容易显示的使用函数表达,不可微XGBoost。
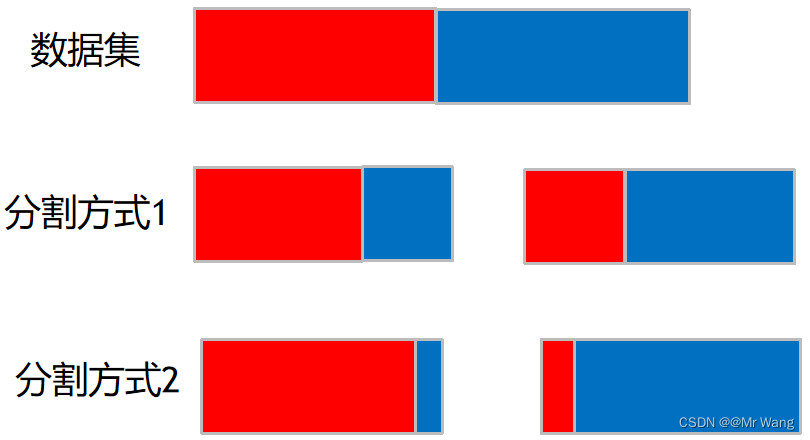
对于一个好的模型对一个数据集进行分类,希望得到以下两种分割方式中的哪一种?当然是分割方式2,它可以保证分割后的两个类别中,分错的类别占比很低,下面介绍一下决策树的流程。
递归解释:
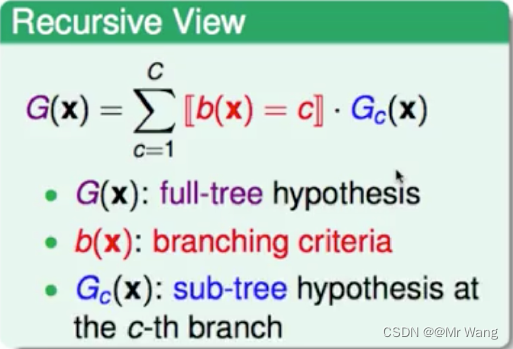
上图中的b(x)=c就相当于是对应的走的子树的所在路径的值,一般为0或1,即走哪条路径哪条路径对应的值就为1。

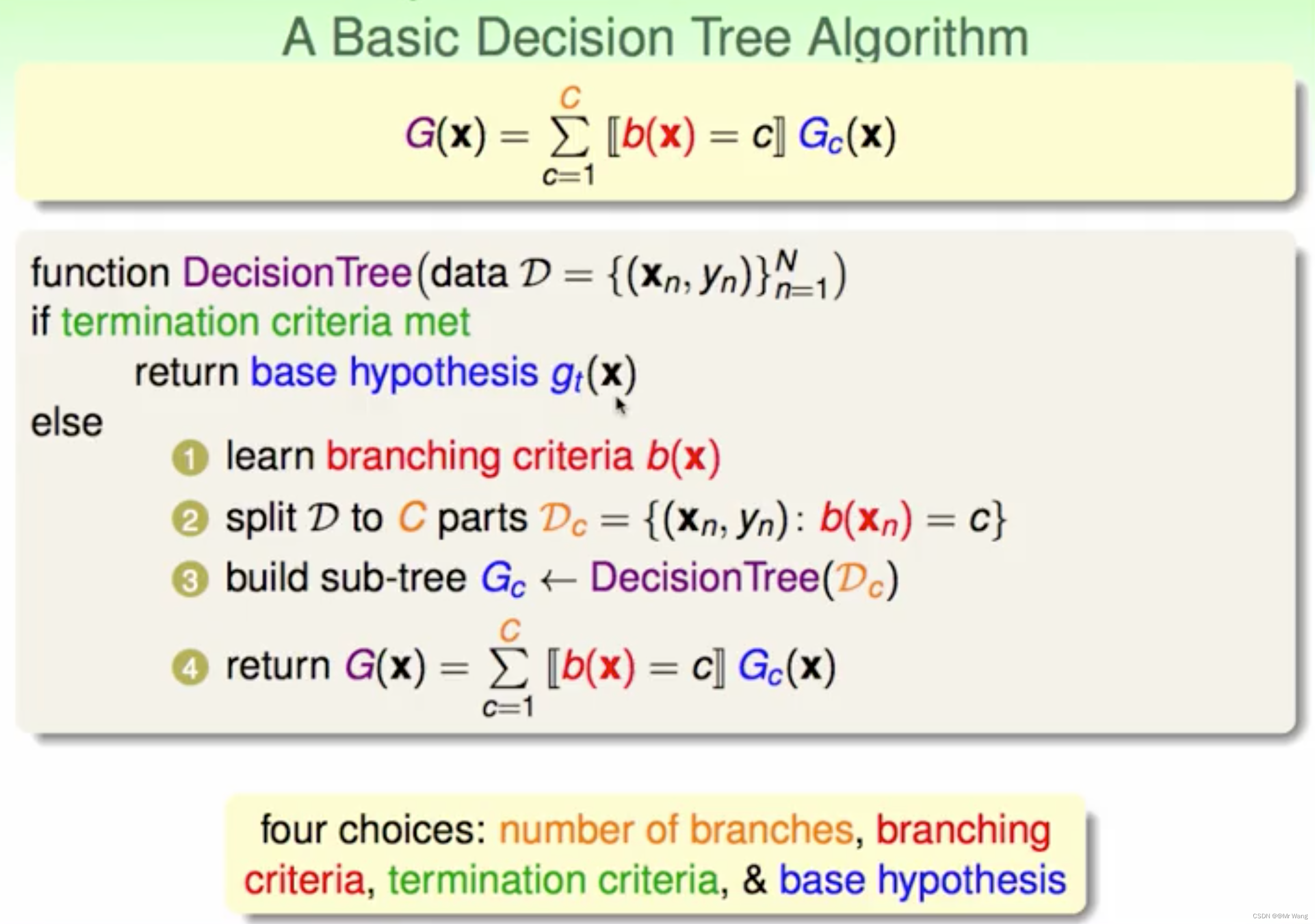
算法描述(递归):
一共有n条样本,gt(x)表示第t个节点所对应的分值,如果节点不允许再继续分裂,即当前到达叶子节点,返回gt(x)。否则,学习分裂的条件,使得节点能不断向下分裂(就是把数据集进行划分),然后把分割后的数据(递归调用)分别重新传入DecisionTree(),构造子树,如果条件判定b(x)也不可再构造出来,构造子树结束。最后需要返回Gc(x)的加权和。
四个选择会导致决策树的形状并不唯一:分支数量、分裂的条件(用于切分数据集)、分支终止条件、基础假设(子树的叶子结点的分值如何计算,G(x))。
随机森林(集成学习方法)
集成学习是指通过结合多个基础学习器的预测结果提高整体的预测性能,旨在利用多个模型的优势弥补单个模型的缺点(组合多个弱学习器构建一个强学习器)。
- Bagging(自举汇聚法):通过在原始数据集上进行有放回抽样,生成多个子数据集,然后分别训练单独的基础学习器,将他们的结果进行组合。随机森林就是这种思想。
- Boosting(提升法):依次训练一系列基础学习器,每个学习器都试图修正前一个学习器的错误,最终将它们的预测结果进行加权组合。
如下图所示,从分类的角度分析(直观叙述),每个决策树都是一个分类器,对于一个输入样本,每棵树都会给出一个分类结果,而随机森林就是集成所有投票结果,根据少数服从多数的原则(使多数靠谱纠正少数不靠谱)选出最终的类别,这就是一种简单的随机森林(Bagging思想)。
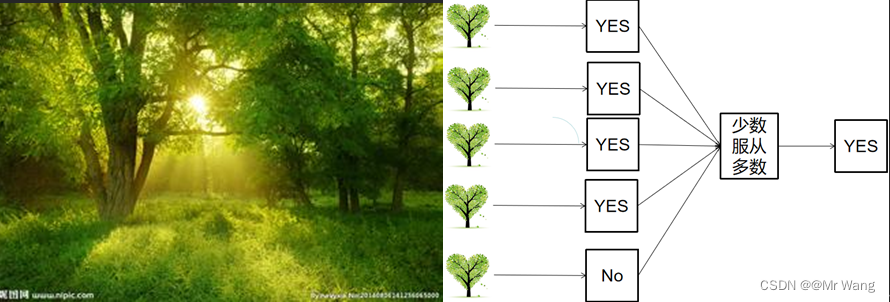
有不同的树构成,每棵树的训练都相互独立,各自学习,可以实现并行,效率很高。
6、预测题案例
可以利用任意一个编程语言,或者伪代码,实现对树的定义(主要这里树的定义要根据你测量结果或者预测一棵树的样子来定义) 在图片中说明变量代表的含义,并通过代码实现对原始图片的数据分析,最终实现根据求出的关系比例来得到你预测树的结果。
python
import random
class Tree:
def __init__(self, height, diameter, leaf_area):
self.height = height # 树高
self.diameter = diameter # 树径树干直径
self.leaf_area = leaf_area # 叶面积
def calculate_ratios(self):
"""
1、通过绘制样本数据固定某一属性为x轴导入matplotlib使用scatter绘制各个属性的散点图,分析为线性还是非线性关系
2、或者是使用相关性分析通过结果值判断各个属性的相关性。
3、假设经分析后,高与直径之间存在线性关系,叶面积与高之间存在线性关系,求解比例关系如下。
"""
# 数据分析部分,假设通过求高径比,叶面积与高的比,进行预测
height_to_diameter_ratio = self.height/self.diameter if self.diameter != 0 else 0
leaf_area_to_height_ratio = self.leaf_area/self.height if self.height != 0 else 0
return height_to_diameter_ratio, leaf_area_to_height_ratio
def predict_tree(height_to_diameter_ratio, leaf_area_to_height_ratio):
# 基于高径比预测直径
predicted_diameter = random.uniform(0.5, 2) * height_to_diameter_ratio
# 基于叶面积与树高比例预测叶面积
predicted_leaf_area = random.uniform(10, 100) * leaf_area_to_height_ratio
return predicted_diameter, predicted_leaf_area
# 样本数据
trees = [
Tree(10, 1, 50), # 树高 10, 树径 1, 叶面积 50
Tree(12, 1.2, 60), # 树高 12, 树径 1.2, 叶面积 60
Tree(9, 0.8, 40) # 树高 9, 树径 0.8, 叶面积 40
]
for tree in trees:
height_to_diameter_ratio, leaf_area_to_height_ratio = tree.calculate_ratios()
print("树木信息:")
print("树高:", tree.height)
print("树径:", tree.diameter)
print("叶面积:", tree.leaf_area)
print("高径比:", height_to_diameter_ratio)
print("叶面积与树高比例:", leaf_area_to_height_ratio)
# 预测新树木的属性
predicted_diameter, predicted_leaf_area = predict_tree(height_to_diameter_ratio, leaf_area_to_height_ratio)
print("预测的树径:", predicted_diameter)
print("预测的叶面积:", predicted_leaf_area)
print("\n")
python
class Tree:
def __init__(self, height, crown_diameter, trunk_diameter):
self.height = height # 树的高度
self.crown_diameter = crown_diameter # 树冠直径
self.trunk_diameter = trunk_diameter # 树干直径
def analyze_tree_image(image):
# 使用图像处理和计算机视觉算法提取树的相关参数
height = measure_height(image) # 测量树的高度
crown_diameter = measure_crown_diameter(image) # 测量树冠直径
trunk_diameter = measure_trunk_diameter(image) # 测量树干直径
return Tree(height, crown_diameter, trunk_diameter)
def predict_tree(tree):
# 根据测量结果和定义的树的结构,进行预测
predicted_height = tree.height * scale_factor_height # 预测树的高度
predicted_crown_diameter = tree.crown_diameter * scale_factor_crown_diameter # 预测树冠直径
predicted_trunk_diameter = tree.trunk_diameter * scale_factor_trunk_diameter # 预测树干直径
return Tree(predicted_height, predicted_crown_diameter, predicted_trunk_diameter)7、2d和3d问题
- 2d(二维):指平面上的形状或对象,具有两个坐标轴,通常为水平轴和垂直轴,在二维空间中物体只有长度和宽度两个方向的尺寸,例如平面图和照片等都是二维的。
- **3d(三维):**指具有三个坐标轴的空间,通常为长度、宽度和高度三个方向的尺寸,可以从各个角度观察,例如实物体、建筑物、立体图形等。
问题描述:考虑光照,是否穿过方格,是不是球体,由3d到2d都可以应该怎么做?
- 光照影响:考虑光照时,可以使用阴影和高光来呈现3D物体在2D平面上的视觉效果。这可以通过计算每个表面的光照情况,并相应地调整其在2D表示中的亮度和颜色来实现。
- 是否穿过方格:如果物体在3D空间中与方格相交,需要确定交点并将其投影到2D平面上。这可以通过计算光线与物体的相交点,然后将其映射到2D平面上的对应位置来实现。
- 形状是否为球体:如果物体的形状为球体,则可以使用球体的投影公式将其投影到2D平面上。这可以通过计算球体与投影平面的交点来确定投影位置,并考虑球体的曲面特性来确定投影的形状和大小。
python
function convert3DTo2D(object3D, lightSource, grid, isSphere):
result2D = empty 2D array
for each point in object3D:
# 光照影响
brightness = calculateBrightness(point, lightSource)
# 是否穿过方格
if intersectsGrid(point, grid):
adjustPointPosition(point, grid)
# 形状是否为球体
if isSphere:
projectedPoint = projectSphereTo2D(point)
else:
projectedPoint = projectPointTo2D(point)
# 在2D数组中记录点的亮度
result2D[projectedPoint.x][projectedPoint.y] = brightness
return result2D
# 计算点的亮度
function calculateBrightness(point, lightSource):
# 根据光照方向和点的法向量计算亮度
# 这里可以使用光照模型(如Phong光照模型)进行计算
# 判断点是否与方格相交
function intersectsGrid(point, grid):
# 判断点是否与方格相交的逻辑
# 调整点的位置,确保不穿过方格
function adjustPointPosition(point, grid):
# 调整点的位置,确保不穿过方格的逻辑
# 将点投影到2D平面上
function projectPointTo2D(point):
# 使用投影方法将点投影到2D平面上
# 将球体投影到2D平面上
function projectSphereTo2D(point):
# 使用球体投影公式将点投影到2D平面上function isLightPassingThrough(grid, sphere_radius, light_position, grid_position):
// 3D空间到2D投影,假设光源位于 (0, 0, 0)
light_x = light_position.x
light_y = light_position.y
light_z = light_position.z
grid_x = grid_position.x
grid_y = grid_position.y
grid_z = grid_position.z
// 确定光线是否经过方格的投影
if (light_x == grid_x && light_y == grid_y):
// 光源与方格在同一平面,无法穿过方格
return false
else if (light_x == grid_x):
// 光线平行于 YZ 平面,检查 YZ 投影是否相交
if (abs(light_y - grid_y) <= sphere_radius && abs(light_z - grid_z) <= sphere_radius):
return true
else
return false
else if (light_y == grid_y):
// 光线平行于 XZ 平面,检查 XZ 投影是否相交
if (abs(light_x - grid_x) <= sphere_radius && abs(light_z - grid_z) <= sphere_radius):
return true
else
return false
else if (light_z == grid_z):
// 光线平行于 XY 平面,检查 XY 投影是否相交
if (abs(light_x - grid_x) <= sphere_radius && abs(light_y - grid_y) <= sphere_radius):
return true
else
return false
else {
// 光线不平行于任何平面,计算光线是否穿过方格
// 利用球体方程 (x - light_x)^2 + (y - light_y)^2 + (z - light_z)^2 <= sphere_radius^2
// 在 XY 平面上的方程
a = 1
b = 1
c = 0
d = -sphere_radius^2
// 计算方格的四个顶点
vertices = [
(grid_x - 0.5, grid_y - 0.5),
(grid_x + 0.5, grid_y - 0.5),
(grid_x + 0.5, grid_y + 0.5),
(grid_x - 0.5, grid_y + 0.5)
]
// 检查光线是否穿过方格的投影
for each vertex in vertices {
if (a * vertex.x + b * vertex.y + c * light_z + d >= 0) {
return true
}
}
return false
}
end function