文章目录
学习来自 OpenCV基础(14)OpenCV在视频中的简单背景估计
中值滤波
中值滤波是一种非线性平滑技术,主要用于数字信号处理,特别是在图像处理中去除噪声。
一、定义与原理
定义:中值滤波是将每一像素点的灰度值设置为该点某邻域窗口内的所有像素点灰度值的中值。
原理:基于排序统计理论,通过把数字图像或数字序列中一点的值用该点的一个邻域中各点值的中值代替,让周围的像素值接近真实值,从而消除孤立的噪声点。
二、实现方法
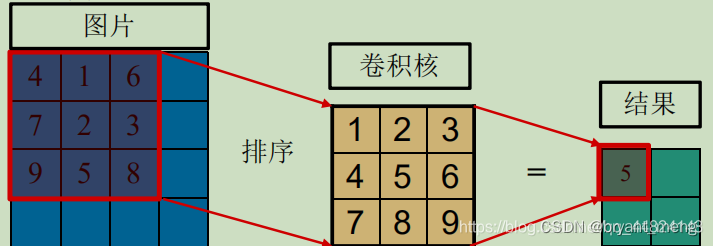
选择一个窗口:通常选择一个(2n+1) x (2n+1)的窗口(如3x3或5x5),使窗口沿图像数据的行方向和列方向从左至右、从上至下滑动。
像素排序:对于窗口内的每个像素,按照其灰度值进行排序。
选择中值:从排序后的像素值中选择中间值作为输出灰度值。
三、特性与优点
抑制噪声:对脉冲噪声和椒盐噪声有良好的滤除作用。
保护边缘:在滤除噪声的同时,能够保护信号的边缘,使之不被模糊。
简单高效:算法比较简单,也易于用硬件实现。
四、适用场景
适用于去除椒盐噪声等孤立噪声。
在图像处理中,常用于保护边缘信息,是经典的平滑噪声的方法。
五、缺点
对于一些点、线、尖顶的细节多的数字图像,以及纹理特征明显、空间信息量丰富、分辨率高的遥感图像的处理效果较差,易造成图像细节模糊、纹理信息丢失等。
六、快速算法
中值滤波的快速算法一般采用以下三种方式:
直方图数据修正法
样本值二进制表示逻辑判断法
数字和模拟的选择网络法
七、总结
中值滤波是一种有效的非线性信号处理技术,特别适用于消除椒盐噪声等孤立噪声,并保护图像边缘。尽管在某些复杂图像中可能存在局限性,但其简单的算法和高效的性能使其在数字信号处理领域得到广泛应用。
中值滤波得到图像背景
原始视频

我们随机取出 25 帧,用中值滤波计算出其中值,滤掉移动的汽车(异常点),得到背景
python
import numpy as np
import cv2
# 打开视频
cap = cv2.VideoCapture('./video.mp4')
# 随机选择25帧
frameIds = cap.get(cv2.CAP_PROP_FRAME_COUNT) * np.random.uniform(size=25)
# 将选定的帧存储在数组中
frames = []
for fid in frameIds:
cap.set(cv2.CAP_PROP_POS_FRAMES, fid)
ret, frame = cap.read()
frames.append(frame)
# 计算沿时间轴的中值
medianFrame = np.median(frames, axis=0).astype(dtype=np.uint8)
# 显示中值帧
cv2.imshow('frame', medianFrame)
cv2.waitKey(0)看看效果

还是非常的 nice,过滤的很干净
移动侦测
前景减去背景,就可以得到移动的目标
python
import numpy as np
import cv2
# 读取视频
cap = cv2.VideoCapture('./video.mp4')
# 随之选择25帧
frameIds = cap.get(cv2.CAP_PROP_FRAME_COUNT) * np.random.uniform(size=25)
# 将选定的帧存储在数组中
frames = []
for fid in frameIds:
cap.set(cv2.CAP_PROP_POS_FRAMES, fid)
ret, frame = cap.read()
frames.append(frame)
# 计算沿时间轴的中值
medianFrame = np.median(frames, axis=0).astype(dtype=np.uint8)
# 显示中值帧
cv2.imshow('frame', medianFrame)
cv2.waitKey(0)
# 重置帧号为0
cap.set(cv2.CAP_PROP_POS_FRAMES, 0)
# 转换背景到灰度
grayMedianFrame = cv2.cvtColor(medianFrame, cv2.COLOR_BGR2GRAY)
# 循环所有帧
ret = True
# index = 0
while ret:
# 读取帧
ret, frame = cap.read()
# 将当前帧转换为灰度
frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 计算当前帧和中间帧的绝对差值
dframe = cv2.absdiff(frame, grayMedianFrame)
# 二值化
th, dframe = cv2.threshold(dframe, 30, 255, cv2.THRESH_BINARY)
# 显示
cv2.imshow('frame', dframe)
# cv2.imwrite(f"./images1/{index}.jpg", dframe)
# index+=1
cv2.waitKey(20)
# 释放视频对象
cap.release()
# 关闭所有窗口
cv2.destroyAllWindows()输入视频
输出移动前景