1、OpenCV Brute-Force匹配器
Brute-Force匹配器的匹配方法非常简单,输入两张图像对应的特征(特征点坐标与特征点域对应的描述子),循环遍历两幅图像中的特征,计算第一幅图像与第二幅图像之间每个特征之间的距离,然后返回距离最近的特征点对或者返回距离最近的k个特征点对。OpenCV中的Brute-Force特征匹配一般用cv2.BFMatcher类实现,类构建方法定义如下:
cpp
cv2.BFMatcher(normType, crossCheck)normType参数用于指定特征比对的范式,常见的可选的类型与所适应的主要特征检测与描述算法如下:
cs
# SIFT、SURF等
normType = cv2.NORM_L2
normType = cv2.NORM_L1
# BRISK、ORB等
normType = cv2.NORM_HAMMINGcrossCheck参数为交叉检验参数,约束输出结果的默认的类型为False。若记输出的一对特征点对为(p1,p2),(p1,p2)所对应的特征对为(feature1,feature2),当参数为False时,匹配对(p1,p2)所对应的特征只需要满足下述的条件①;当默认类型调整为True时,则匹配输出的匹配对会更加严格,匹配对(p1,p2)所对应的特征则需要同时满足下述的条件①与条件②。
①第一幅图像中的特征feature1与第二幅图像中的所有的特征比较后与feature2距离最近;
②第二幅图像中的特征feature2与第一幅图像中的所有的特征比较后与feature1距离最近。
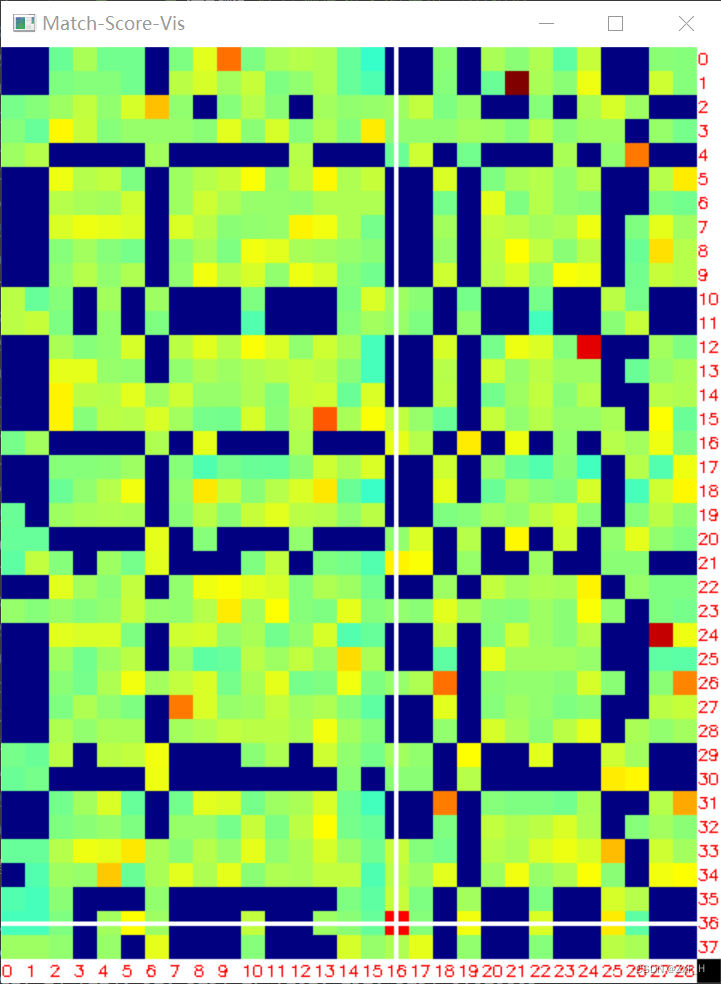
下图将两幅图像之间的每个特征点之间的匹配分数做下可视化,横竖分别表示第一幅图与第二幅图,颜色越红则表示距离越近。则条件①表示只需满足一行中颜色最红即可,如匹配对(27,8);而条件①②则表示行列中均满足颜色最红,如匹配对(16,36)。
2、cv2.BFMatcher的两种比对方法
2.1、match方法
match方法输出结果为距离最近的特征点对,输出结果中第一幅图像中每个特征点在第二幅中只有唯一的一个匹配特征点结果。
2.2、knnMatch方法
knnMatch方法输出结果为距离最近的1~k个特征点对,常见的设置为k=2,输出结果中第一幅图像中每个特征点在第二幅图像中可以有1~k个匹配结果。输出的k个匹配对需要进一步处理,从而确定一个特征点对是否是更加可靠的、更加具有特征性的,一般处理方式为比较k个特征点对之间的距离,若距离相近则说明第一幅图像中的对应特征点在第二幅图像中有多个相近的特征点,则说明该对特征点不太能确定这多个相近的特征点中那个才是正确匹配,说明该特征点对不可靠,反之则说明该特征点对匹配结果为更加可靠,可以暂定k对中距离最近的匹配对为正确匹配。
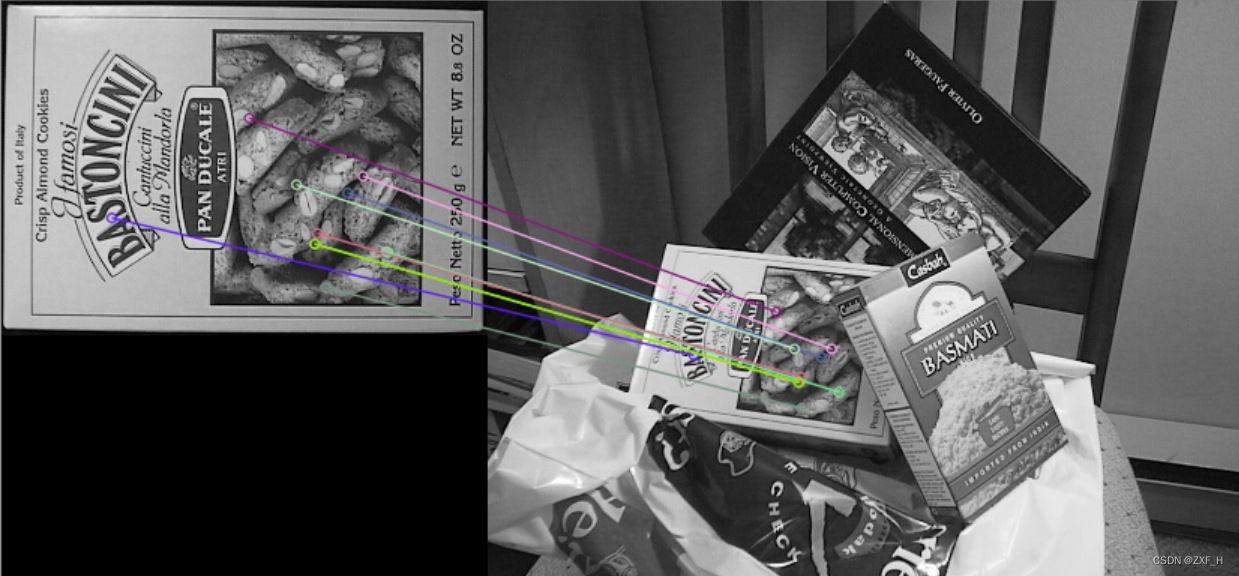
具体的匹配可视化示例如下图所示: