在进行科研项目时,我们常常需要将 C++ 和 Python 结合起来编程。然而,每次将 PCL(Point Cloud Library)的内容添加到 CMakeLists.txt 文件中时都会报错。在深入分析后,我们推测可能是当前使用的 PCL 1.8 版本与现有程序不兼容。因此,我们决定尝试安装最新的 PCL 1.14.1 版本,以期望解决这些兼容性问题。
1. 卸载旧版本的 PCL:
首先,我们需要卸载系统中现有的 PCL 1.8 版本,以避免与新版本产生冲突。
sudo apt-get remove libpcl-dev2. 安装依赖
bash
sudo apt-get update
sudo apt-get install git build-essential linux-libc-dev
sudo apt-get install cmake cmake-gui
sudo apt-get install libusb-1.0-0-dev libusb-dev libudev-dev
sudo apt-get install mpi-default-dev openmpi-bin openmpi-common
sudo apt-get install libflann1.9 libflann-dev #这里改成1.9
sudo apt-get install libeigen3-dev
sudo apt-get install libboost-all-dev
sudo apt-get install libvtk7.1-qt libvtk7.1 libvtk7-qt-dev # 这里用7.1 不要用8以上的
sudo apt-get install libqhull* libgtest-dev
sudo apt-get install freeglut3-dev pkg-config
sudo apt-get install libxmu-dev libxi-dev
sudo apt-get install mono-complete
sudo apt-get install openjdk-8-jdk openjdk-8-jre
# 安装OpenNI,OpenNI2
sudo apt-get install libopenni-dev
sudo apt-get install libopenni2-dev
# 安装QT5:
sudo apt install qtcreator
sudo apt install qt5-default
# 安装metslib
wget https://www.coin-or.org/download/source/metslib/metslib-0.5.3.tgz
tar xzvf metslib-0.5.3.tgz
cd metslib-0.5.3
./configure
make -j`nproc`
sudo make install中间提示选择Y/N的全部选Y
3.下载最新版本的PCL库并编译
bash
git clone https://github.com/PointCloudLibrary/pcl.git
或者
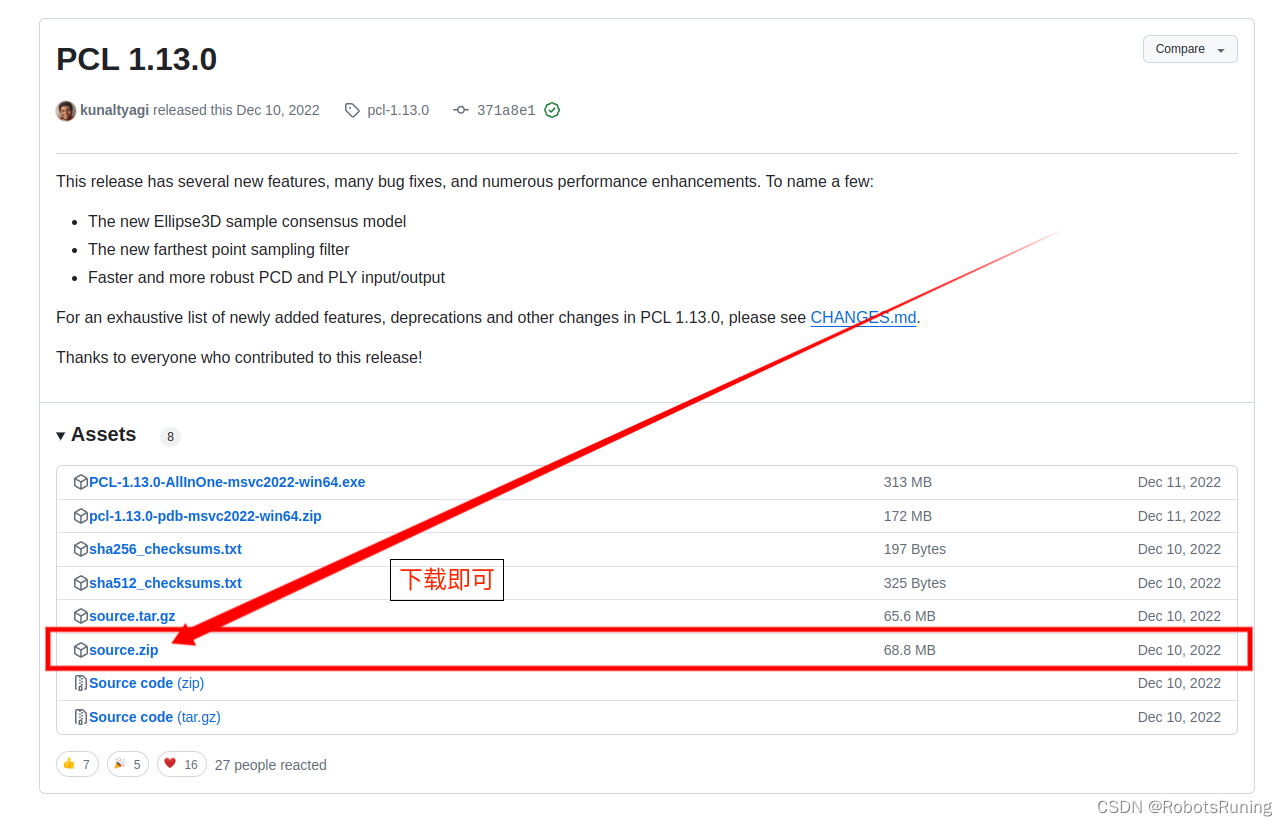
git clone https://gitee.com/mirrors/pcl.git如果需要指定版本,请你点击下面连接进行下载。
选择source.zip
解压进入 pcl 文件夹:
bash
cd pcl
# 切换到指定版本v1.14.1再编译
# git checkout pcl-1.14.1 # 也可以不要这一行命令,直接安装最新的版本
# 创建目录并进入目录
mkdir build && cd build
#安装在系统目录
cmake .. \
-DCMAKE_BUILD_TYPE=None \
-DCMAKE_INSTALL_PREFIX=/usr/local \
-DCMAKE_PREFIX_PATH=/usr/lib/x86_64-linux-gnu \
-DFREETYPE_LIBRARY=/usr/lib/x86_64-linux-gnu/libfreetype.so \
-DBUILD_GPU=ON \
-DBUILD_apps=ON \
-DBUILD_simulation=ON \
-DBUILD_examples=ON
#也可以安装在自己指定的目录,如下所示(主要是改下安装空间):
cmake .. \
-DCMAKE_BUILD_TYPE=None \
-DCMAKE_INSTALL_PREFIX=~/Programs/lib/PCL1141 \
-DCMAKE_PREFIX_PATH=/usr/lib/x86_64-linux-gnu \
-DFREETYPE_LIBRARY=/usr/lib/x86_64-linux-gnu/libfreetype.so \
-DBUILD_GPU=ON \
-DBUILD_apps=ON \
-DBUILD_simulation=ON \
-DBUILD_examples=ON
# Orin 切换到 MAXN POWER MODE
# 进行编译
make -j`nproc`
#编译完后,执行安装
sudo make installmake -j`nproc`成功界面
sudo make install 成功界面
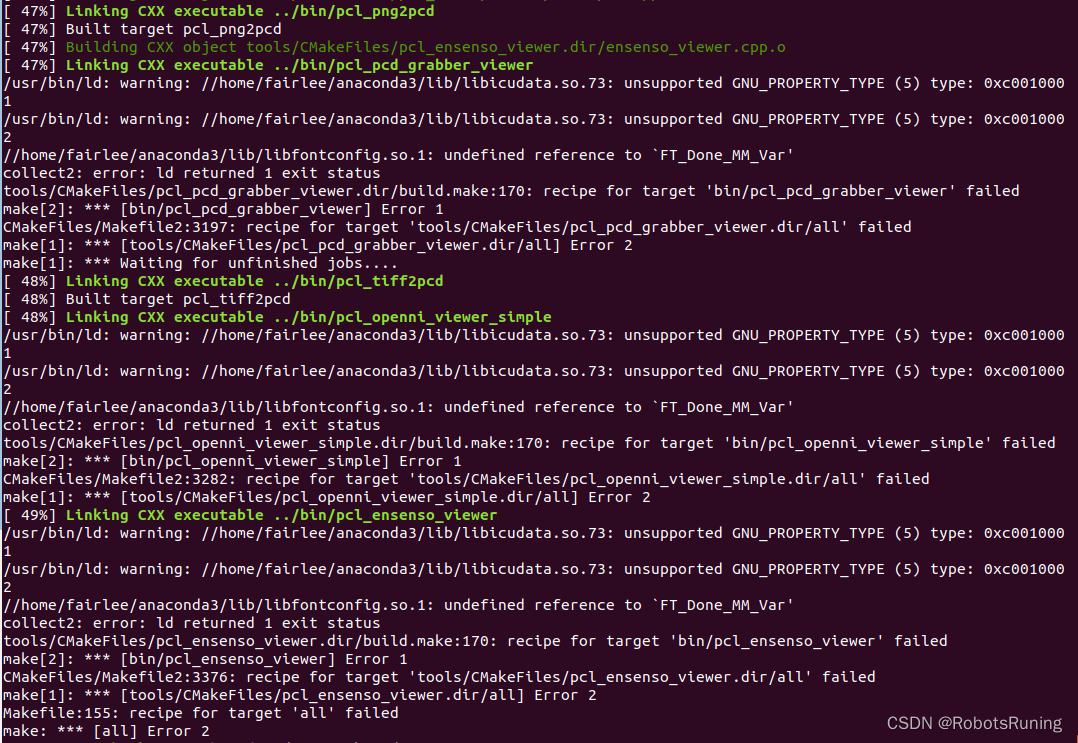
问题1:
/usr/bin/ld: warning: //home/fairlee/anaconda3/lib/libicudata.so.73: unsupported GNU_PROPERTY_TYPE (5) type: 0xc0010001
/usr/bin/ld: warning: //home/fairlee/anaconda3/lib/libicudata.so.73: unsupported GNU_PROPERTY_TYPE (5) type: 0xc0010002
//home/fairlee/anaconda3/lib/libfontconfig.so.1: undefined reference to `FT_Done_MM_Var'
collect2: error: ld returned 1 exit status
tools/CMakeFiles/pcl_pcd_grabber_viewer.dir/build.make:170: recipe for target 'bin/pcl_pcd_grabber_viewer' failed
make2: *** bin/pcl_pcd_grabber_viewer Error 1
CMakeFiles/Makefile2:3197: recipe for target 'tools/CMakeFiles/pcl_pcd_grabber_viewer.dir/all' failed
make1: *** tools/CMakeFiles/pcl_pcd_grabber_viewer.dir/all Error 2
make1: *** Waiting for unfinished jobs....
解决方案:
这个错误可能是由于系统中存在多个版本的库,而编译器使用了不兼容的版本。在这种情况下,Anaconda环境中的库可能与系统库冲突。因此,完全移除Anaconda的影响: 临时重命名你的Anaconda目录,以确保系统不会使用任何Anaconda的库:
最后安装成功后,别忘了把文件名改回去!!!!!!!!!
4. 安装验证
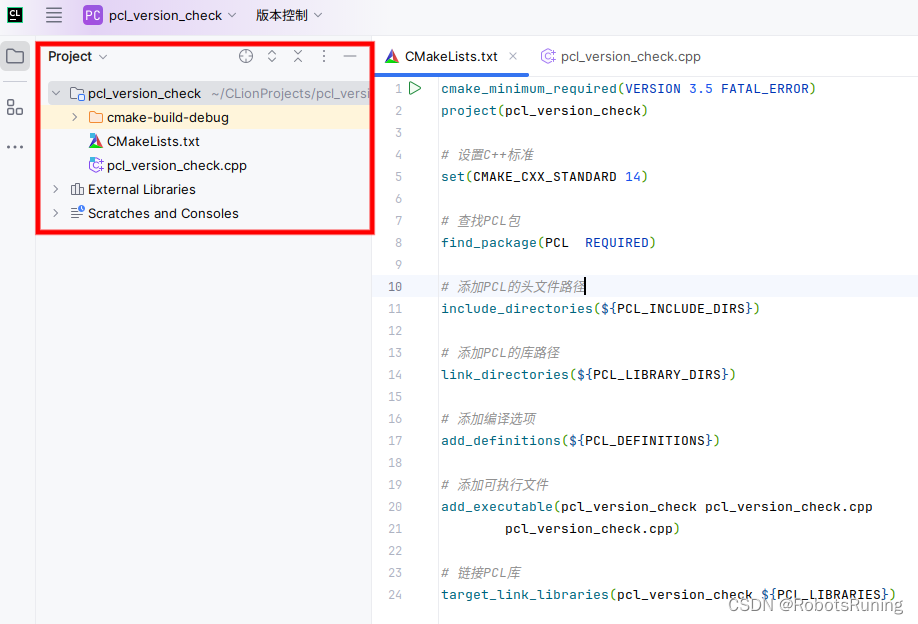
CMakeLists.txt
bash
cmake_minimum_required(VERSION 3.5 FATAL_ERROR)
project(pcl_version_check)
# 设置C++标准
set(CMAKE_CXX_STANDARD 14)
# 查找PCL包
find_package(PCL REQUIRED)
# 添加PCL的头文件路径
include_directories(${PCL_INCLUDE_DIRS})
# 添加PCL的库路径
link_directories(${PCL_LIBRARY_DIRS})
# 添加编译选项
add_definitions(${PCL_DEFINITIONS})
# 添加可执行文件
add_executable(pcl_version_check pcl_version_check.cpp
pcl_version_check.cpp)
# 链接PCL库
target_link_libraries(pcl_version_check ${PCL_LIBRARIES})pcl_version_check.cpp
cpp
#include <iostream>
#include <pcl/pcl_config.h>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <iostream>
#include <pcl/common/common_headers.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/console/parse.h>
int main() {
std::cout << "PCL version: " << PCL_VERSION_PRETTY << std::endl;
// 创建一个简单的点云对象来测试基本功能
pcl::PointCloud<pcl::PointXYZ> cloud;
std::cout << "Test PCL !" << std::endl;
pcl::PointCloud<pcl::PointXYZRGB>::Ptr point_cloud_ptr (new pcl::PointCloud<pcl::PointXYZRGB>);
uint8_t r(255), g(15), b(15);
for (float z(-1.0); z <= 1.0; z += 0.05) {
for (float angle(0.0); angle <= 360.0; angle += 5.0) {
pcl::PointXYZRGB point;
point.x = 0.5 * cosf (pcl::deg2rad(angle));
point.y = sinf (pcl::deg2rad(angle));
point.z = z;
uint32_t rgb = (static_cast<uint32_t>(r) << 16 | static_cast<uint32_t>(g) << 8 | static_cast<uint32_t>(b));
point.rgb = *reinterpret_cast<float*>(&rgb);
point_cloud_ptr->points.push_back (point);
}
if (z < 0.0) {
r -= 12;
g += 12;
}
else {
g -= 12;
b += 12;
}
}
point_cloud_ptr->width = (int) point_cloud_ptr->points.size ();
point_cloud_ptr->height = 1;
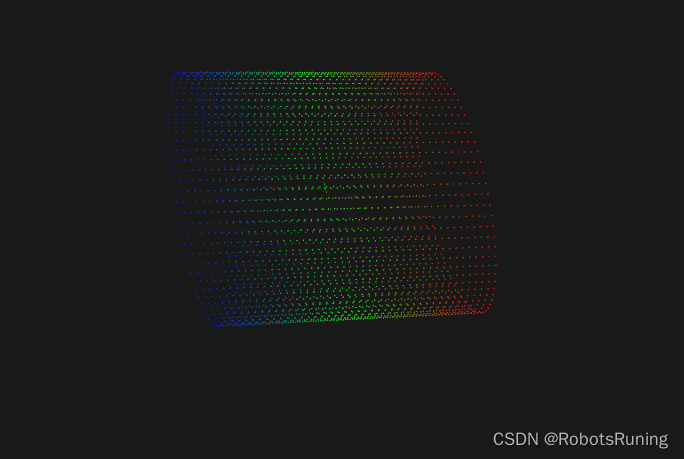
pcl::visualization::CloudViewer viewer ("test");
viewer.showCloud(point_cloud_ptr);
while (!viewer.wasStopped()){ };
// 如果代码执行到这里没有错误,说明PCL基本功能正常
std::cout << "PCL basic functionality test passed." << std::endl;
return 0;
}结果
致谢
ubuntu 18.04 安装PCL 1.12.1_the following subsystems will not be built:-- visu-CSDN博客