问题描述:
基于野火电机F407骄阳开发板, 利用例程,有刷直流电机按键控制
电驱:TB6612模块 电机:某直流减速有刷电机
发现PWM 到达50%之后 电机 才会开始旋转 。前50%电机不旋转
问题解决分析与过程:
利用STM32F103的PWM例程重新试过了,也一样是到达了50%以后才会开启
解决:
通过查看芯片手册:AT8236芯片手册 发现 芯片中 有 慢衰减和快衰减 两种模式
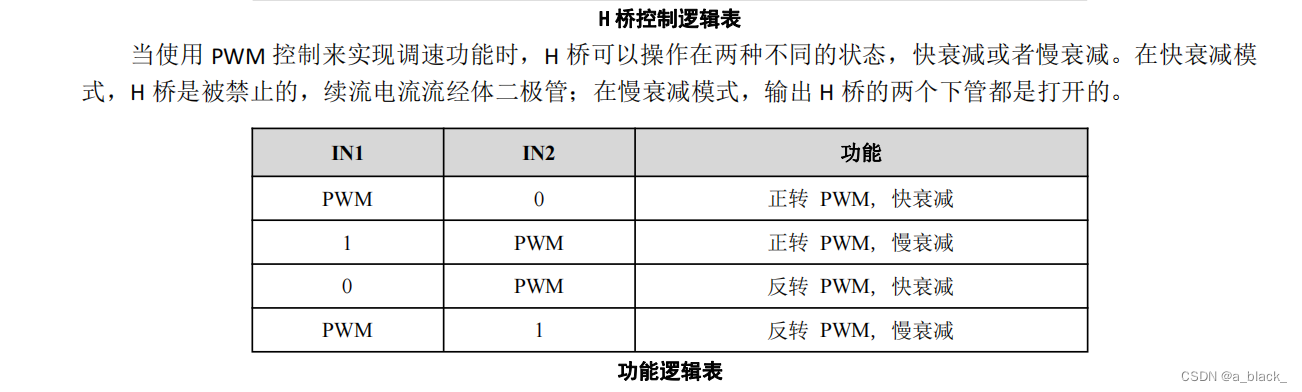
实际上 野火例程中 两个都是PWM(对应慢衰减)
所以 只需要 将一个 IN1 脚至一 让模式变成 慢衰减模式 即可
需要注意: 慢衰减模式 PWM应该是反着来的 90%PWM 对应的是10%PWM时的转速
快衰减和慢衰减
快衰减模式和慢衰减模式通常用于步进电机的驱动器中,用于控制电机的步进角度及转速。以下是这两种模式的区别和适用场景:
- 快衰减模式(Fast Decay Mode): 快衰减模式是一种高速切换方式,通过快速切断电机的电流来减少步进电机的速度。这种模式通常可以实现较快的加减速度,提高了步进电机的动态响应速度。因为采用快速切换,电机可能会产生较大的电磁干扰(EMI),同时也可能增加电路中的噪声。
适用场景:适用于需要较快加减速度和高动态响应速度的应用场景,如需要快速变换步进角度的设备。
- 慢衰减模式(Slow Decay Mode): 慢衰减模式是一种减速过程较为平缓的方式,通过逐渐降低电机的电流来减少步进电机的速度。这种模式相对稳定,可以减少电机的振动和噪音,但同时也可能导致加减速较慢。
适用场景:适用于对电机平稳性要求比较高的应用场景,如需要稳定转动的自动控制系统。
总的来说,快衰减模式适用于需要快速响应和高速运动的场景,而慢衰减模式适用于对稳定性要求较高的场景。选择合适的模式取决于具体的应用需求和对电机性能的要求。