1.定时器介绍
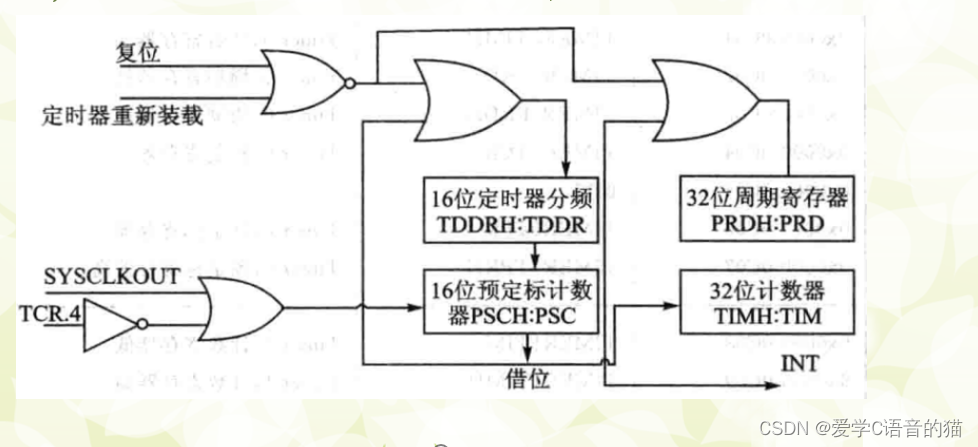
1.1 定时器工作原理
TMS320F28335的CPU Time有三个,分别为Timer0,Timer1,Timer2,其中Timer2是为操作系统DSP/BIOS保留的,当未移植操作系统时,可用来做普通的定时器。这三个定时器的中断信号分别为TINT0, TINT1, TINT2,分别对应于中断向量INT1,INT13,INT14。
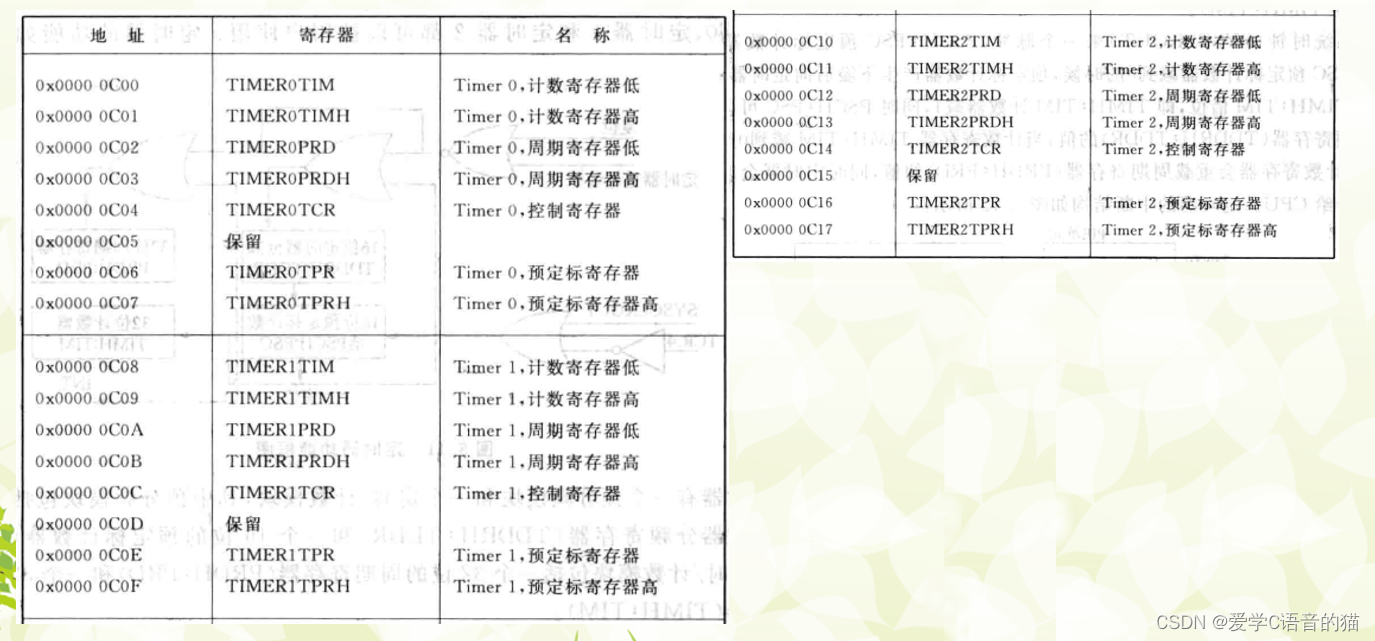
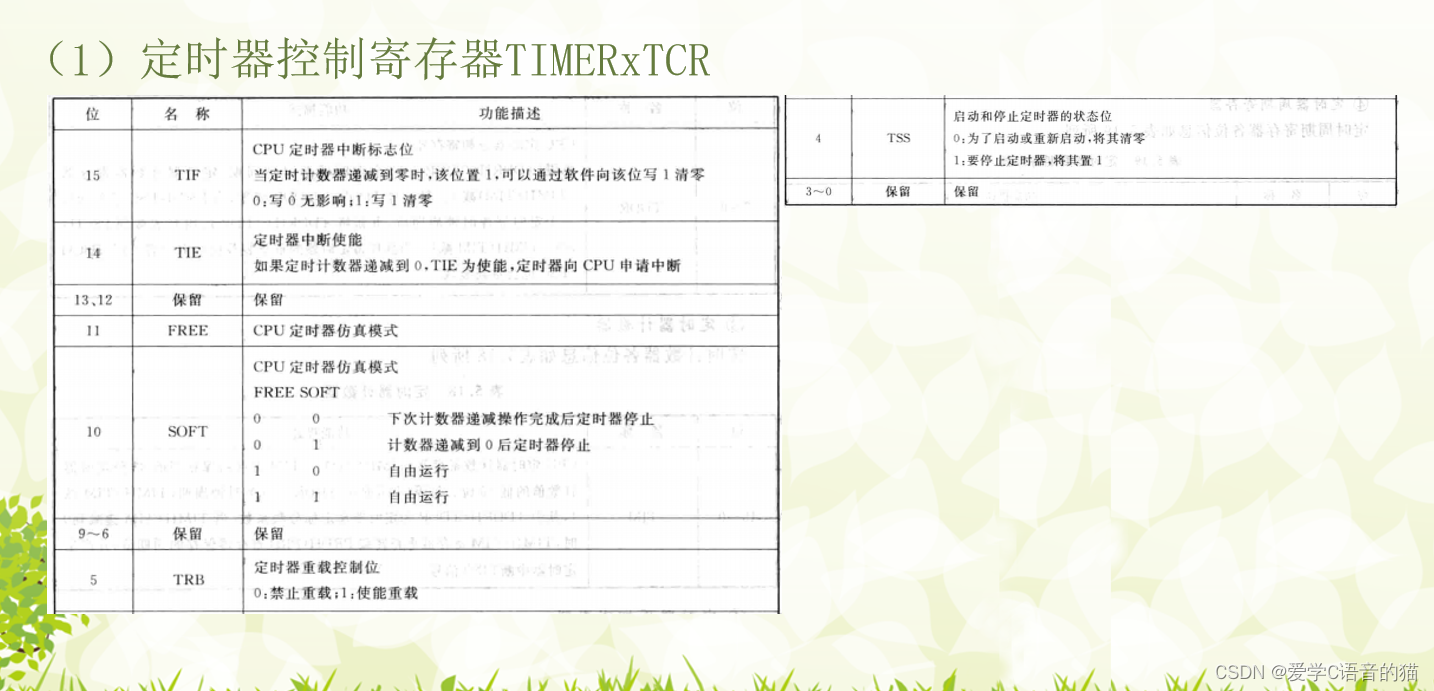
1.2 定时器相关寄存器
1.3.定时器配置步骤
定时器相关库函数在DSP2833x_CpuTimers.c文件中
(1)使能定时器时钟
EALLOW;
SysCtrlRegs.PCLKCR3.bit.CPUTIMER0ENCLK = 1; // CPU Timer 0
EDIS;
(2)初始化定时器参数,包括制定定时器寄存器地址、周期寄存器值、预定标计数器值等
//指向定时器0的寄存器地址
CpuTimer0.RegsAddr = &CpuTimer0Regs;
//设置定时器0的周期寄存器值
CpuTimer0Regs.PRD.all = 0xFFFFFFFF;
//设置定时器预定标计数器值为0
CpuTimer0Regs.TPR.all = 0; CpuTimer0Regs.TPRH.all = 0;
//确保定时器0为停止状态
CpuTimer0Regs.TCR.bit.TSS = 1;
//重载使能
CpuTimer0Regs.TCR.bit.TRB = 1;
// Reset interrupt counters:
CpuTimer0.InterruptCount = 0;
(3)定时器的设置 TI提供的库函数"DSP2833x_CpuTimers.c"内已经有函数实现
void ConfigCpuTimer(struct CPUTIMER_VARS *Timer, float Freq, float Period)
(4)开启定时器中断功能,并使能定时器
//设置定时器0的中断入口地址为中断向量表的INT0
EALLOW;
PieVectTable.TINT0 = &TIM0_IRQn;
EDIS;
//开始定时器功能
CpuTimer0Regs.TCR.bit.TSS=0;
//开启CPU第一组中断并使能第一组中断的第7个小中断,即定时器0
IER |= M_INT1;
PieCtrlRegs.PIEIER1.bit.INTx7 = 1;
//使能总中断 EINT;
ERTM;
(5)编写定时器中断服务函数
interrupt void TIM0_IRQn(void)
{ ......功能程序 }
实验
本章所要实现的功能是:通过Timer0中断控制 D2 指示灯闪烁,主函数控制 D1 指示灯闪烁提示系统运行状态。程序框架如下:
(1)初始化定时器0,并使能相应中断
(2)编写定时器0中断函数
(3)编写主函数
LED程序参考前面的博客,写过了
Time.h
cpp
#ifndef TIME_H_
#define TIME_H_
#include "DSP2833x_Device.h" // DSP2833x 头文件
#include "DSP2833x_Examples.h" // DSP2833x 例子相关头文件
void TIM0_Init(float Freq, float Period);
interrupt void TIM0_IRQn(void);
void TIM1_Init(float Freq, float Period);
interrupt void TIM1_IRQn(void);
void TIM2_Init(float Freq, float Period);
interrupt void TIM2_IRQn(void);
#endif /* TIME_H_ */Time.c
cpp
#include "Time.h"
#include "leds.h"
//定时器0初始化函数
//Freq:CPU时钟频率(150MHz)
//Period:定时周期值,单位us
void TIM0_Init(float Freq, float Period)
{
EALLOW;
SysCtrlRegs.PCLKCR3.bit.CPUTIMER0ENCLK = 1; // CPU Timer 0
EDIS;
//设置定时器0的中断入口地址为中断向量表的INT0
EALLOW;
PieVectTable.TINT0 = &TIM0_IRQn;
EDIS;
//指向定时器0的寄存器地址
CpuTimer0.RegsAddr = &CpuTimer0Regs;
//设置定时器0的周期寄存器值
CpuTimer0Regs.PRD.all = 0xFFFFFFFF;
//设置定时器预定标计数器值为0
CpuTimer0Regs.TPR.all = 0;
CpuTimer0Regs.TPRH.all = 0;
//确保定时器0为停止状态
CpuTimer0Regs.TCR.bit.TSS = 1;
//重载使能
CpuTimer0Regs.TCR.bit.TRB = 1;
// Reset interrupt counters:
CpuTimer0.InterruptCount = 0;
ConfigCpuTimer(&CpuTimer0, Freq, Period);
//开始定时器功能
CpuTimer0Regs.TCR.bit.TSS=0;
//开启CPU第一组中断并使能第一组中断的第7个小中断,即定时器0
IER |= M_INT1;
PieCtrlRegs.PIEIER1.bit.INTx7 = 1;
//使能总中断
EINT;
ERTM;
}
interrupt void TIM0_IRQn(void)
{
EALLOW;
LED2_TOGGLE;
PieCtrlRegs.PIEACK.bit.ACK1=1;
EDIS;
}main.c
cpp
void main()
{
int i=0;
InitSysCtrl();
InitPieCtrl();
IER = 0x0000;
IFR = 0x0000;
InitPieVectTable();
LED_Init();
TIM0_Init(150,500000);
while(1)
{
i++;
if(i%2000==0)
{
LED1_TOGGLE;
}
DELAY_US(100);
}
}