通过使用MATLAB进行电路仿真以及通过制作实物进行验证,通过BUCK电路设计DC-DC来达到我们预期的效果,资料获取到咸🐟:xy591215295250 \\\或者联系wechat 号:comprehensivable
设计要求:设计一个DC-DC 电源,具体参数如下:直流输入输入30V(20%变化),输出直流电压20V,纹波系数<5%,功率约50W,(负载20%变化),开关频率10kHz,占空比可调。(最坏情况电压最高,负载最高,输出恒压源,矛盾产生)
对DC-DC电源主电路拓扑进行分析与设计;
PWM控制方案设计、原理分析;
给出具体L、C、R参数计算原理及过程;
设计合理的实验方案及步骤;
开、闭环时参数的影响,如电感、电容、电阻的值,PI调节器参数 、开关频率观测输出波形的变化,分析仿真实验结果,验证设计方案的可行性,得出明确的结论;
熟悉PWM控制IC TL494芯片特性及应用,电路的搭建、焊接、调试;
数据的测量、观察与分析,根据观测数据进行分析、评估,得出明确的结论;模型的优化与改善;
注:仿真的时候有闭环,实物制作未闭环
Buck降压斩波电路原理分析:
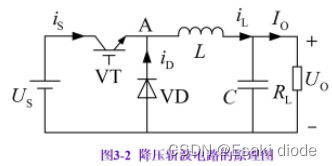
电路结构:由开关器件(IGBT为例)、电感L、续流二极管、滤波电容C、模拟负载R构成Buck电路。
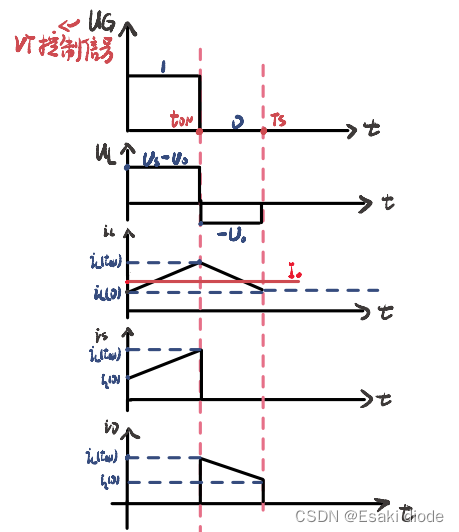
工作原理:当大电感主要分为俩个阶段,VT导通和VT关断,可等效为俩个电路,其输出波形见下图1所示,VT导通时,二极管VD截止,us通过L向负载传递能量,此时iL增加,由于是大电感,iL(0)电流并不为0。


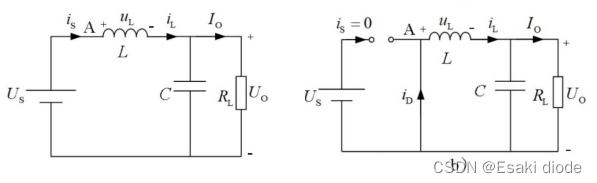
波形分析:当uG为高电平时,VT导通,当当uG为低电平时VT关断,由于大电感的存在,电流不能立刻反向,需要通过VD续流,通过等效电路分为俩个部分,is电流变化和iL正半周期变化一致,io变化和iL续流变化一致,由于大电感的存在,电流初始电流不为0。
PI调节原理分析:
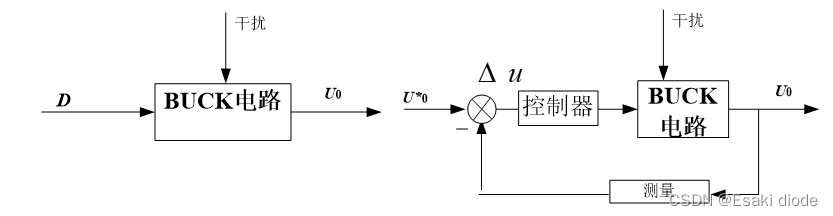
图4 开环和闭环控制
图4左边的是开环控制,D设定为一固定值,三相输入电压的变化、负载的变化以及参数的变化都可以看作是干扰。开环控制对干扰没有抑制作用,因此控制效果并不理想。
为了改善控制效果,引入闭环控制。它是利用期望值与测量值的偏差值作为控制器的输入,控制器通过调节输出控制量,使电路的输出最终稳定在期望值。
控制器一般采用PI调节器,P表示比例运算,即控制器输出与输入信号成比例关系。I表示积分运算,积分具有记忆、缓冲、保存的功能,积分的主要功能是消除静差。只要静差存在,积分就会起作用,静差为零,积分输出就维持不变,要注意比例P无法消除静差。
双闭环控制策略
为了获得较好的动静态特性,如稳态误差小、上升时间短、超调量低,引入双闭环控制策略。外环为电压环,电压取之负载电压,主要作用是维持负载电压稳定。内环为电流环,电流取之电感电流,作用是获得较快的动态特性。如图5所示。
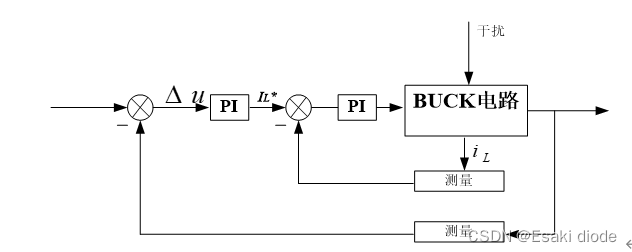
图5 双闭环控制结构
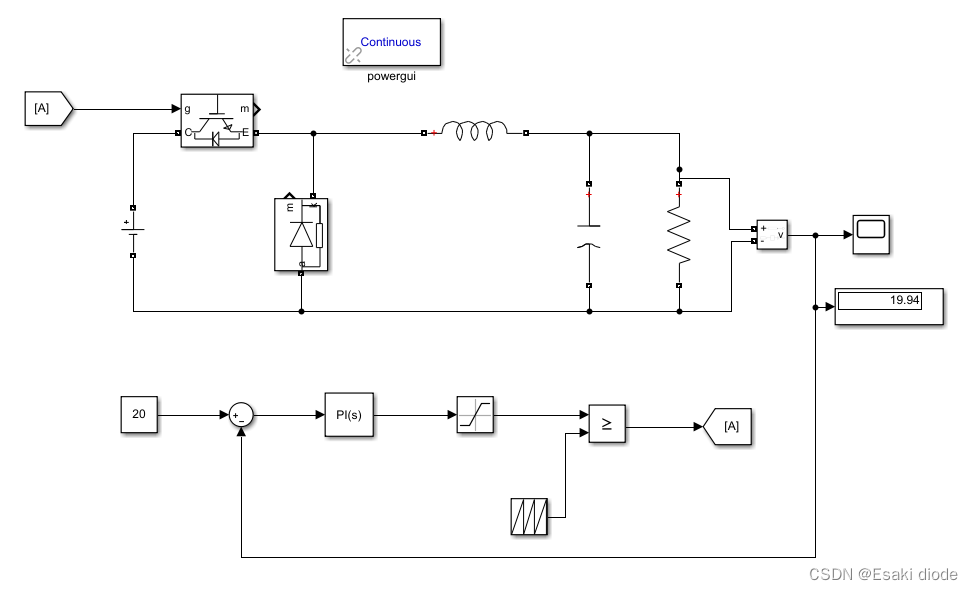
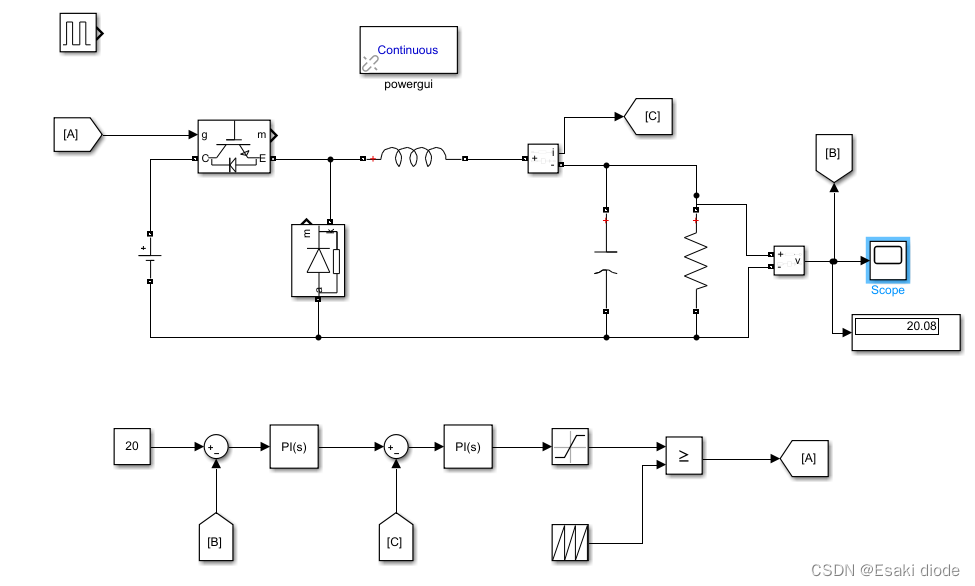
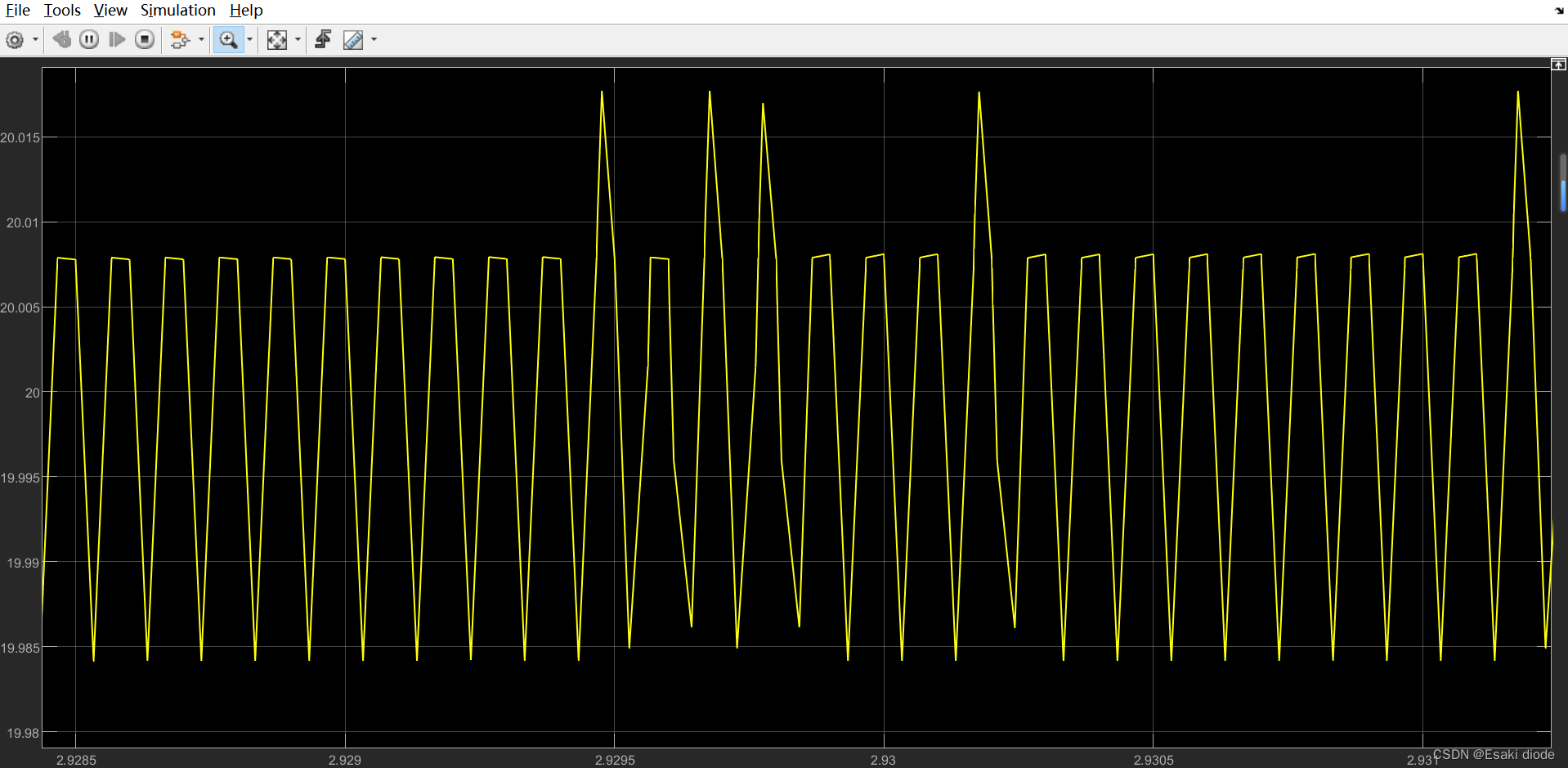
通过采集输出的电压和电流,为了获得较好的动静态特性,如稳态误差小、上升时间短、超调量低,引入双闭环控制策略。外环为电压环,电压取之负载电压,主要作用是维持负载电压稳定。内环为电流环,电流取之电感电流,作用是获得较快的动态特性,其输出电压纹波小于5%满足实验要求。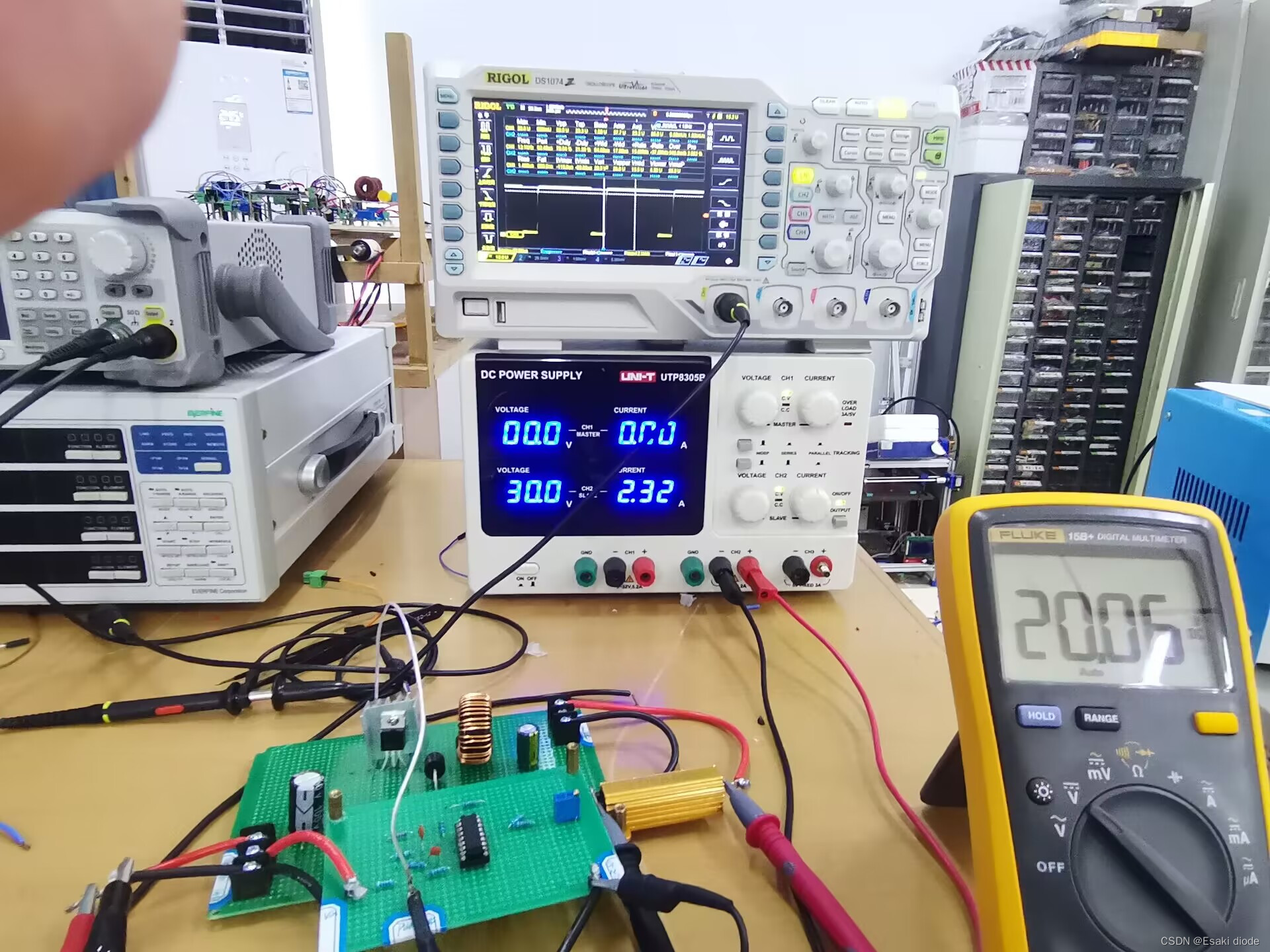 通过将PWM发生电路和Buck电路进行联合,主要利用PWM来控制NMOS的导通和关断从而控制输出电压的结果,通过调节滑动变阻器,相当于调节死区时间来调节输出的电压输出,通过调节可以看到下图输入30V,输出20V,达到实验的要求。
通过将PWM发生电路和Buck电路进行联合,主要利用PWM来控制NMOS的导通和关断从而控制输出电压的结果,通过调节滑动变阻器,相当于调节死区时间来调节输出的电压输出,通过调节可以看到下图输入30V,输出20V,达到实验的要求。