51单片机-温度传感器DS18B20
本文主要基于51单片机的温度传感器DS18B20开发示例的编程应用来理解开发中如何看时序图,用代码模拟时序图实现器件功能。
1.DS18B20简介
DS18B20的核心功能是它可以直接读出数字的温度数值。温度传感器的精度为用户可编程的9,10,11或12位,分别以0.5℃,0.25℃,0.125℃和0.0625℃增量递增。在上电状态下默认的精度为12位。
DS18B20启动后保持低功耗等待状态,当需要执行温度测量和AD转换时,总线控制器必须发出44h命令。转换完以后,产生的温度数据以两个字节的形式被存储到高速暂存器的温度寄存器中,DS18B20继续保持等待状态。
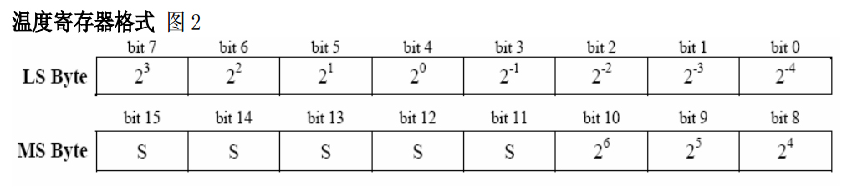
2.内部温度寄存器
这是12位转化后得到的12位数据,存储在DS18B20的两个8位的RAM中,高字节的前5位是符号位,如果测得的温度大于0,这5位为'0',只要将测到的数值乘以0.0625即可得到实际温度;如果温度小于0,这5位为'1',测到的数值需要先减1再取反再乘以0.0625即可得到实际温度。
3.ROM和RAM指令


用DS18B20"写"功能执行约定代码得到相应的指令功能。该"写"功能根据时序图得到。
4.新建temp库代码实现
4.1.库文件.h
c
//temp.h
#ifndef _temp_H
#define _temp_H
#include <reg52.h>
#ifndef uchar
#define uchar unsigned char
#ifndef uint
#define uint unsigned int
#endif
sbit DSPORT = P3^7; //接线的引脚
int Ds18b20ReadTemp();//声明函数,方便在主函数调用
#endif4.2.DS18B20初始化
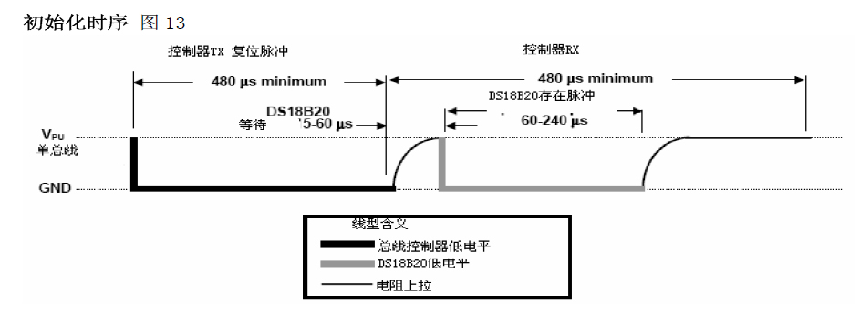
(1)数据端口拉到低电平"0"。
(2)延时480微秒(该时间的时间范围可以从480到960微秒)。
(3)数据端口拉到高电平"1"。
(4)延时等待80微秒。如果初始化成功则在15到60微妙时间内产生一个由DS18B20所返回的低电平"0".根据该状态可以来确定它的存在,但是应注意不能无限的进行等待,不然会使程序进入死循环,所以要进行超时判断。
(5)若CPU读到了数据端口上的低电平"0"后,还要做延时,其延时的时间从发出的高电平算起
(第(3)步的时间算起)最少要480微秒。
c
//temp.c
/*
*初始化函数:Ds18b20Init()
*根据时序图,先拉低电平延时480us~960us,这里用642us,再将数据端口拉高,判断
*是否存在可用的DS18b20(0为存在,1为不存在),如果存在该温度传感器,就初始化返回1,
*否则不存在时先等待5ms(在时序图中要超过控制器RX的480us),在等待5ms后依然是不存在,
*就确定没有可用的温湿度传感器,初始化返回0.
*/
uchar Ds18b20Init()
{
uchar i=0;
DSPORT=0;//数据端口拉低电平
i=70;
while(i--);//642us(延时要求480us~960us)
DSPORT=1;//数据端口拉高电平
i=0;
/*
如果初始化成功得到DSPORT返回的低电平0,跳出while,整个初始化函数返回1,否则判断是否超时,
超过5ms后整个初始化函数返回0
*/
while(DSPORT)
{
Delay1ms(1);
i++;
if(i>5)
{
return 0;
}
}
return 1;
}3.2.DS18B20"读"

(1).将数据端口拉低"0"。
(2).延时1微秒。(执行一条指令就有1us以上了)
(3).将数据端口拉高"1",释放总线准备读数据。
(4).延时10微秒。
(5).读数据端口的状态得到1个状态位,并进行数据处理。
(6).延时45微秒。
(7).重复1~7步骤,直到读完一个字节。
c
//temp.c
uchar Ds18b20ReadByte()
{
uint i,j;
uchar bi,byte;
for(j=8;j>0;j--)
{
DSPORT=0;
i++;//用来延时微秒
DSPORT=1;
i++;//用来延时微秒
i++;//用来延时微秒
bi=DSPORT;
byte=(byte>>1)|(bi<<7);
i=4;
while(i--);//延时45us
}
return byte;
}3.2.DS18B20"写"
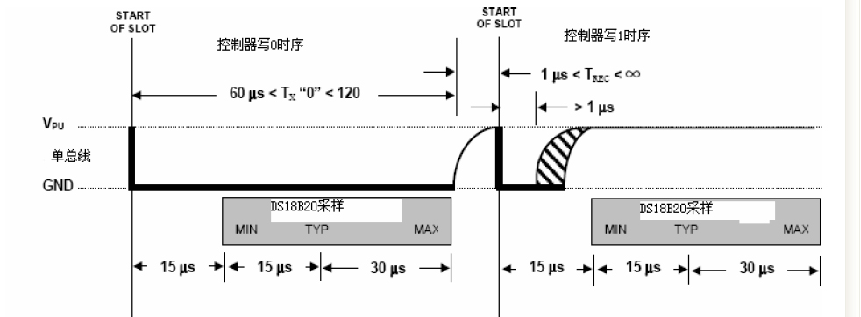
(1).数据端口先置低电平"0";
(2).延时15微秒;
(3).按从低位到高位的顺序发送数据(一次只发送一位);
(4).延时60微秒;(最少48us)
(5).将数据端口拉到高电平;
(6).重复1~5步骤,直到发送完整的字节;
(7).最后将数据端口拉高。
c
void Ds18b20writebyte (uchar dat)
{
uchar i,j;
for(j=0;j<8;j++)
{
DSPORT=0;//拉低电平
i++;
DSPORT=dat&0x01;//与0x01相"与",得到第一位,
i=6;
while(i--);//68us
DSPORT=1;//拉高电平
dat>>1;//右移一位,开始写第二位
}
}3.3.温度转换
对照ROM和RAM指令表得到代码值,放到"写"操作函数作为参数中执行。
c
void Ds18b20ChangeTemp()
{
Ds18b20Init();//初始化
Delay1ms(1);//延时1ms
Ds18b20writebyte(0xcc);//跳过ROM,从ROM指令表得到代码值0xcc
Ds18b20writebyte(0x44);//启动12分辨率温度转换,从RAM指令表得到代码值0x44
//加延时避免闪烁
}3.4.发送温度读取命令
c
void Ds18b20ReadTempCom()
{
Ds18b20Init();
Delay1ms(1);
Ds18b20writebyte(0xcc);//跳过64位ROM,从ROM指令表得到代码值0xcc
Ds18b20writebyte(0xbe);//读内部RAM中9字节的内容,从RAM指令表得到代码值0xbe
}3.5.读取真正检测的温度的函数
c
int Ds18b20ReadTemp()
{
int temp = 0;//
uchar tmH, tmL;
Ds18b20ChangTemp(); //先写入转换命令
Ds18b20ReadTempCom(); //然后等待转换完后发送读取温度命令
tmL = Ds18b20ReadByte(); //读取温度值共16位,先读低字节
tmH = Ds18b20ReadByte(); //再读高字节
temp = tmH;
temp <<= 8;
temp |= tmL;
return temp;
}5.完整代码实现
主函数,将检测到的温度值显示到数码管上
c
//temp.c
#include "temp.h"
void Delay1ms(uint y)
{
uint x;
for( ; y>0; y--)
{
for(x=110; x>0; x--);
}
}
uchar Ds18b20Init()
{
uchar i;
DSPORT = 0; //将总线拉低480us~960us
i = 70;
while(i--);//延时642us
DSPORT = 1; //然后拉高总线,如果DS18B20做出反应会将在15us~60us后总线拉低
i = 0;
while(DSPORT) //等待DS18B20拉低总线
{
Delay1ms(1);
i++;
if(i>5)//等待>5MS
{
return 0;//初始化失败
}
}
return 1;//初始化成功
}
void Ds18b20WriteByte(uchar dat)
{
uint i, j;
for(j=0; j<8; j++)
{
DSPORT = 0; //每写入一位数据之前先把总线拉低1us
i++;
DSPORT = dat & 0x01; //然后写入一个数据,从最低位开始
i=6;
while(i--); //延时68us,持续时间最少60us
DSPORT = 1; //然后释放总线,至少1us给总线恢复时间才能接着写入第二个数值
dat >>= 1;
}
}
uchar Ds18b20ReadByte()
{
uchar byte, bi;
uint i, j;
for(j=8; j>0; j--)
{
DSPORT = 0;//先将总线拉低1us
i++;
DSPORT = 1;//然后释放总线
i++;
i++;//延时6us等待数据稳定
bi = DSPORT; //读取数据,从最低位开始读取
/*将byte左移一位,然后与上右移7位后的bi,注意移动之后移掉那位补0。*/
byte = (byte >> 1) | (bi << 7);
i = 4; //读取完之后等待48us再接着读取下一个数
while(i--);
}
return byte;
}
void Ds18b20ChangTemp()
{
Ds18b20Init();
Delay1ms(1);
Ds18b20WriteByte(0xcc); //跳过ROM操作命令
Ds18b20WriteByte(0x44); //温度转换命令
//Delay1ms(100); //等待转换成功,而如果你是一直刷着的话,就不用这个延时了
}
int Ds18b20ReadTemp()
{
int temp = 0;
uchar tmh, tml;
Ds18b20ChangTemp(); //先写入转换命令
Ds18b20ReadTempCom(); //然后等待转换完后发送读取温度命令
tml = Ds18b20ReadByte(); //读取温度值共16位,先读低字节
tmh = Ds18b20ReadByte(); //再读高字节
temp = tmh;
temp <<= 8;
temp |= tml;
return temp;
}
c
//main.c
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器
#include"temp.h"
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
sbit LSA=P2^2;
sbit LSB=P2^3;
sbit LSC=P2^4;
char num=0;
u8 DisplayData[8];
u8 code smgduan[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
void Delay1ms()//用仿真计算软件得到延时时间1ms
{
uint x;
for(;y>0;y--)
{
for(x=110;x>0;x--);
}
}
/*******************************************************************************
* 函 数 名 : datapros()
* 函数功能 : 温度读取处理转换函数
* 输 入 : temp
* 输 出 : 无
*******************************************************************************/
void datapros(int temp)
{
float tp;
if(temp< 0) //当温度值为负数
{
DisplayData[0] = 0x40; // -
//因为读取的温度是实际温度的补码,所以减1,再取反求出原码
temp=temp-1;
temp=~temp;
tp=temp;
temp=tp*0.0625*100+0.5;
//留两个小数点就*100,+0.5是四舍五入,因为C语言浮点数转换为整型的时候把小数点
//后面的数自动去掉,不管是否大于0.5,而+0.5之后大于0.5的就是进1了,小于0.5的就
//算加上0.5,还是在小数点后面。
}
else
{
DisplayData[0] = 0x00;
tp=temp;//因为数据处理有小数点所以将温度赋给一个浮点型变量
//如果温度是正的那么,那么正数的原码就是补码它本身
temp=tp*0.0625*100+0.5;
//留两个小数点就*100,+0.5是四舍五入,因为C语言浮点数转换为整型的时候把小数点
//后面的数自动去掉,不管是否大于0.5,而+0.5之后大于0.5的就是进1了,小于0.5的就
//算加上0.5,还是在小数点后面。
}
DisplayData[1] = smgduan[temp / 10000];
DisplayData[2] = smgduan[temp % 10000 / 1000];
DisplayData[3] = smgduan[temp % 1000 / 100] | 0x80;
DisplayData[4] = smgduan[temp % 100 / 10];
DisplayData[5] = smgduan[temp % 10];
}
void DigDisplay()
{
u8 i;
for(i=0;i<6;i++)
{
switch(i) //位选,选择点亮的数码管,
{
case(0):
LSA=0;LSB=0;LSC=0; break;//显示第0位
case(1):
LSA=1;LSB=0;LSC=0; break;//显示第1位
case(2):
LSA=0;LSB=1;LSC=0; break;//显示第2位
case(3):
LSA=1;LSB=1;LSC=0; break;//显示第3位
case(4):
LSA=0;LSB=0;LSC=1; break;//显示第4位
case(5):
LSA=1;LSB=0;LSC=1; break;//显示第5位
}
P0=DisplayData[5-i];//发送数据
delay(100); //间隔一段时间扫描
P0=0x00;//消隐
}
}
void main()
{
while(1)
{
datapros(Ds18b20ReadTemp()); //数据处理函数
DigDisplay();//数码管显示函数
}
}