(本内容源自《详解MATLAB/SIMULINK 通信系统建模与仿真》 刘学勇编著的第二章内容,有兴趣的可以阅读该书)
例:简单系统输入为两个不同频率的正弦、余弦信号,输出为两信号之和,建立模型。
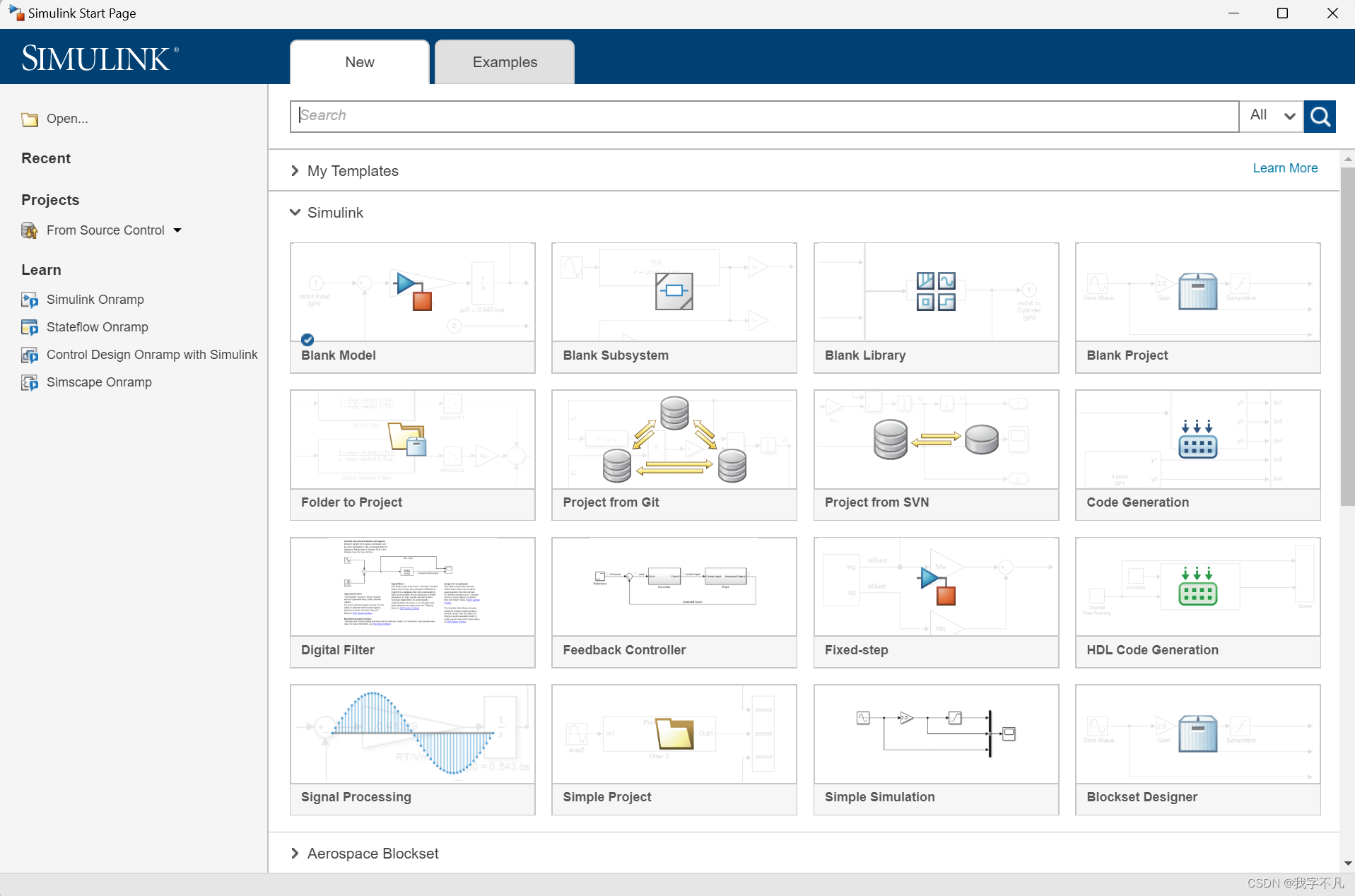
在命令行中输入simulink,执行,打开仿真软件。
选择第一行的Blank Model,双击建立空白模型文件
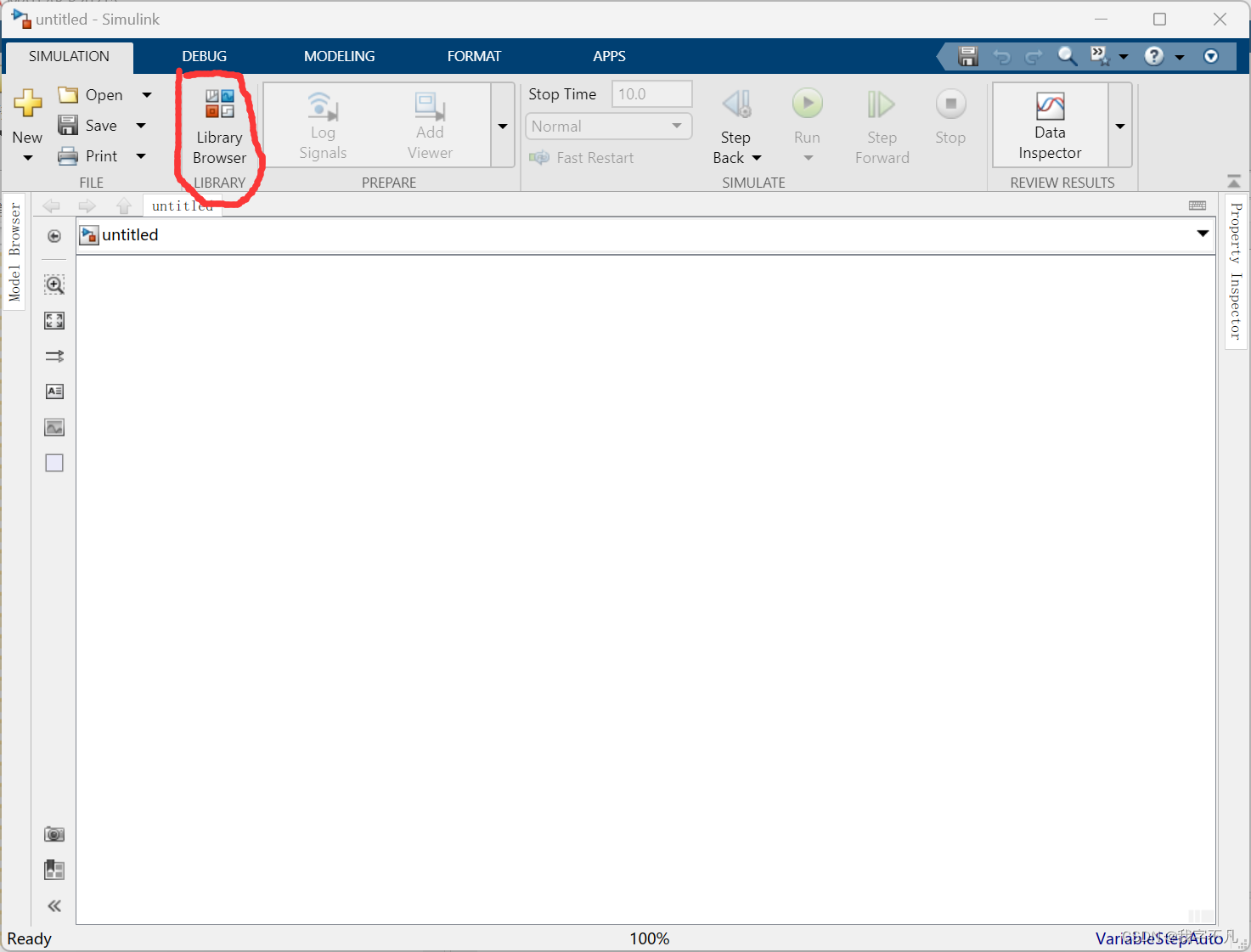
点击工具栏中的library browsers,进行元件的选择
例子中我们需要两个正弦信号发生器,一个相加器,一个示波器(用来显示结果)
首先是相加器,我们可以在搜索栏中输入add进行元件的寻找。
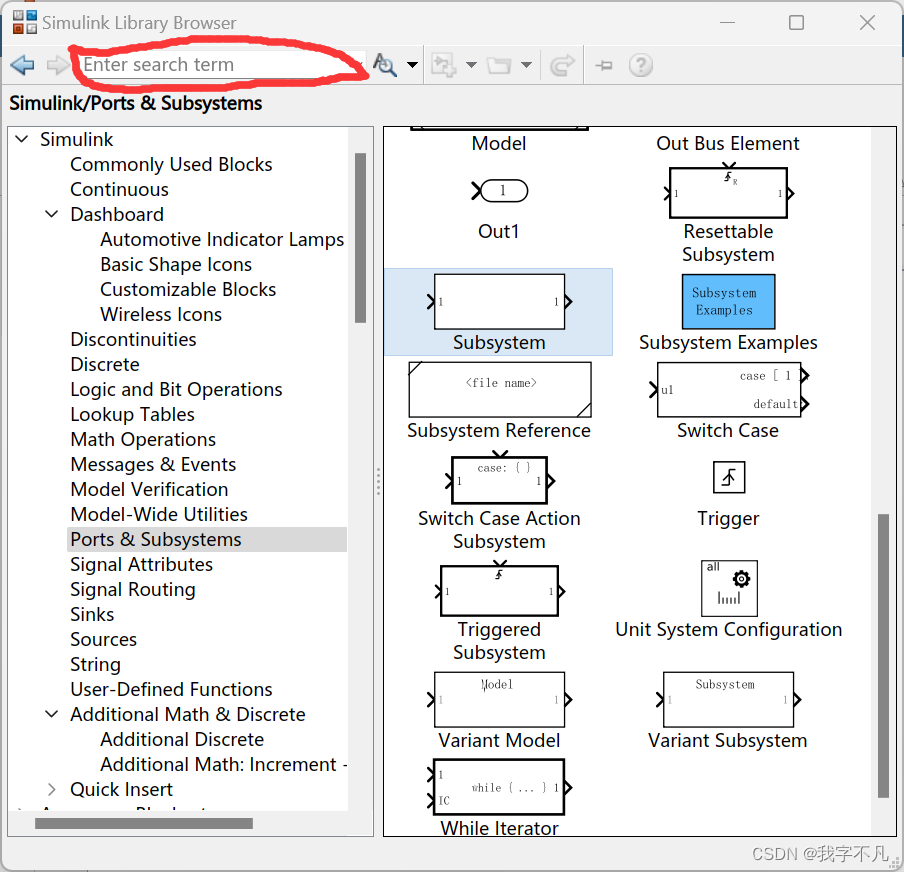
找到后鼠标左键按住元件不松,将元件拖拽到指定位置
其它的元件同理,(示波器关键词:scope,正弦信号发生器关键词:sine wave,元件选中后可以按ctrl+v进行复制)
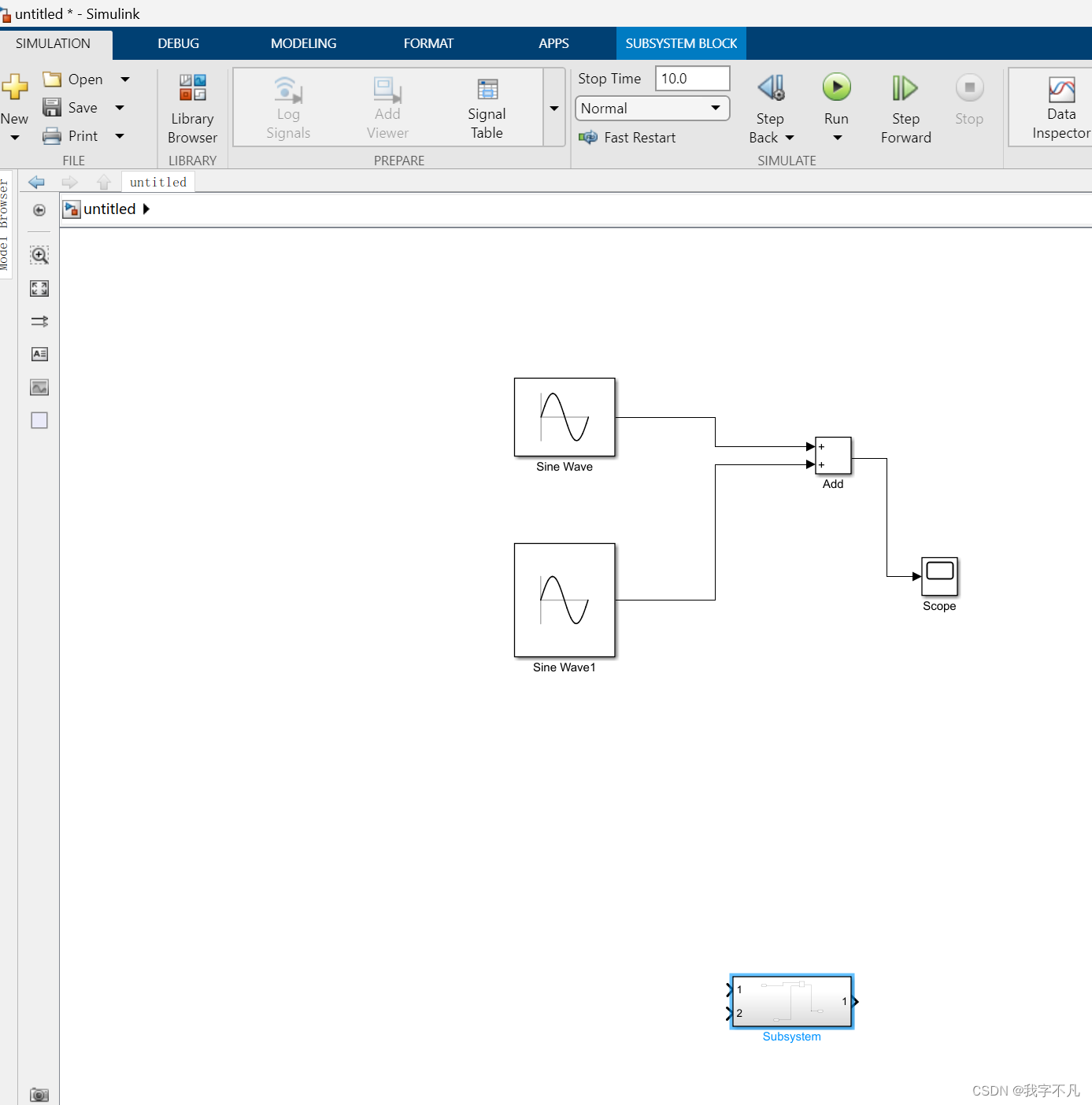
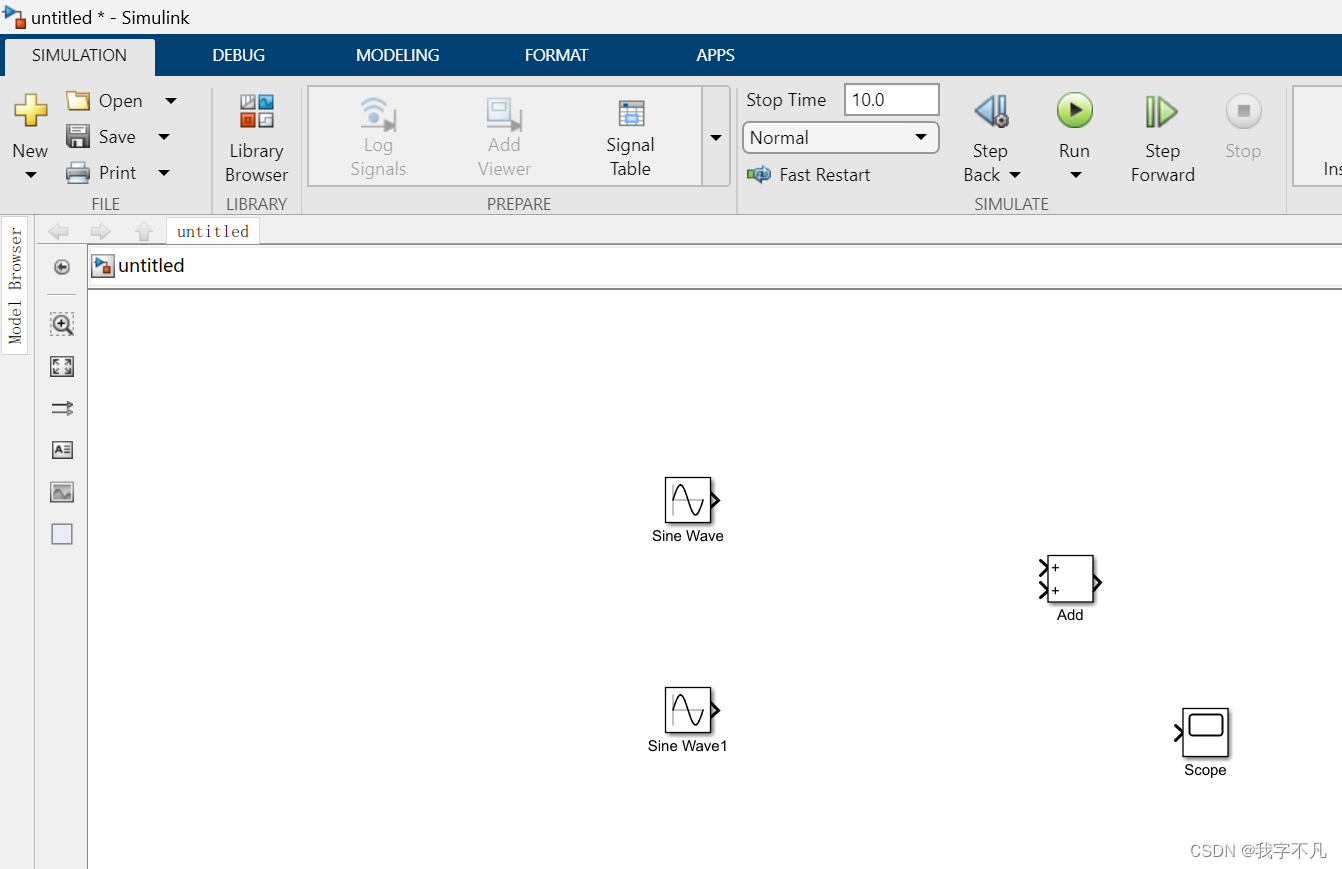
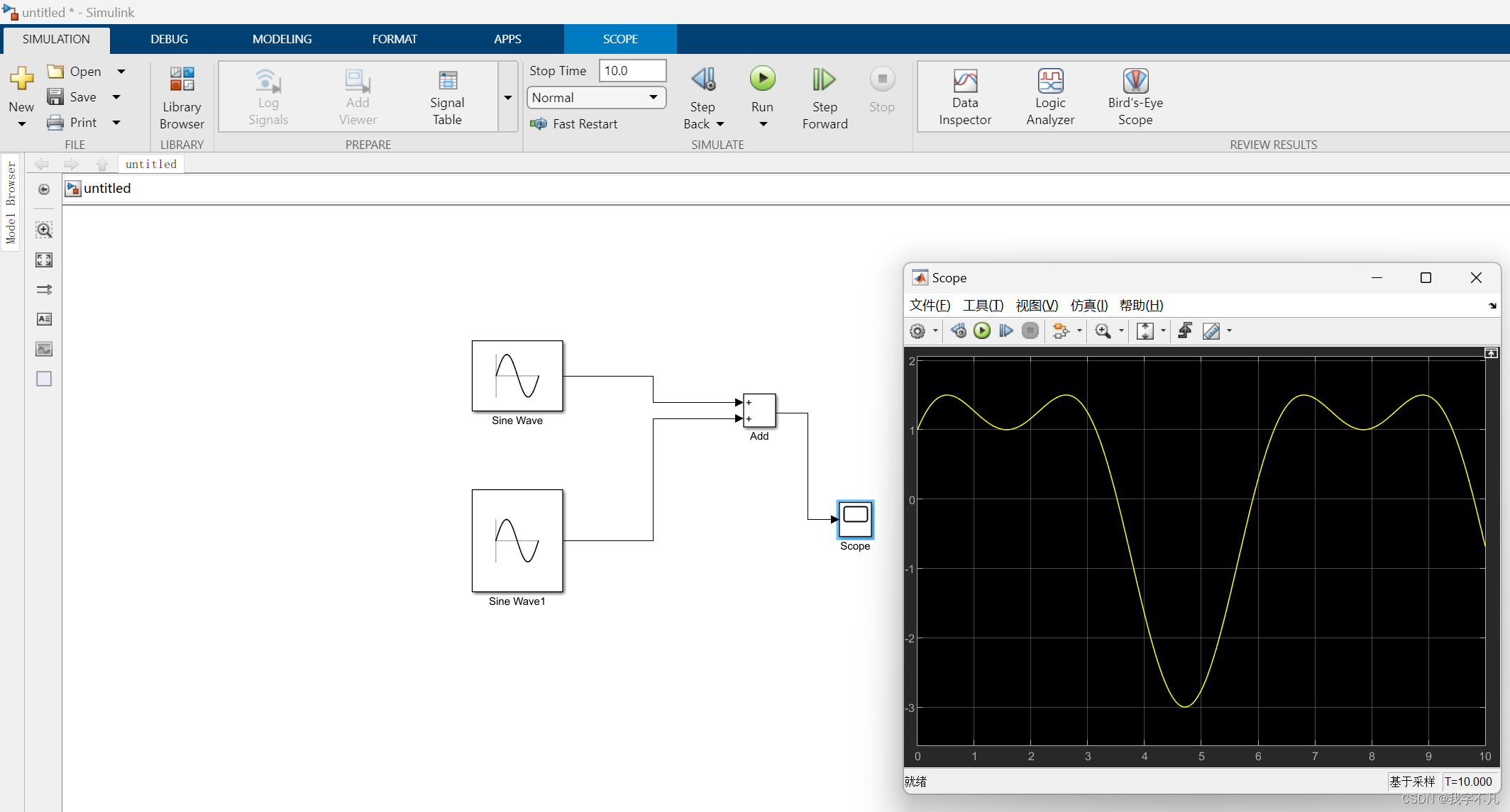
元件放置结束后如下图
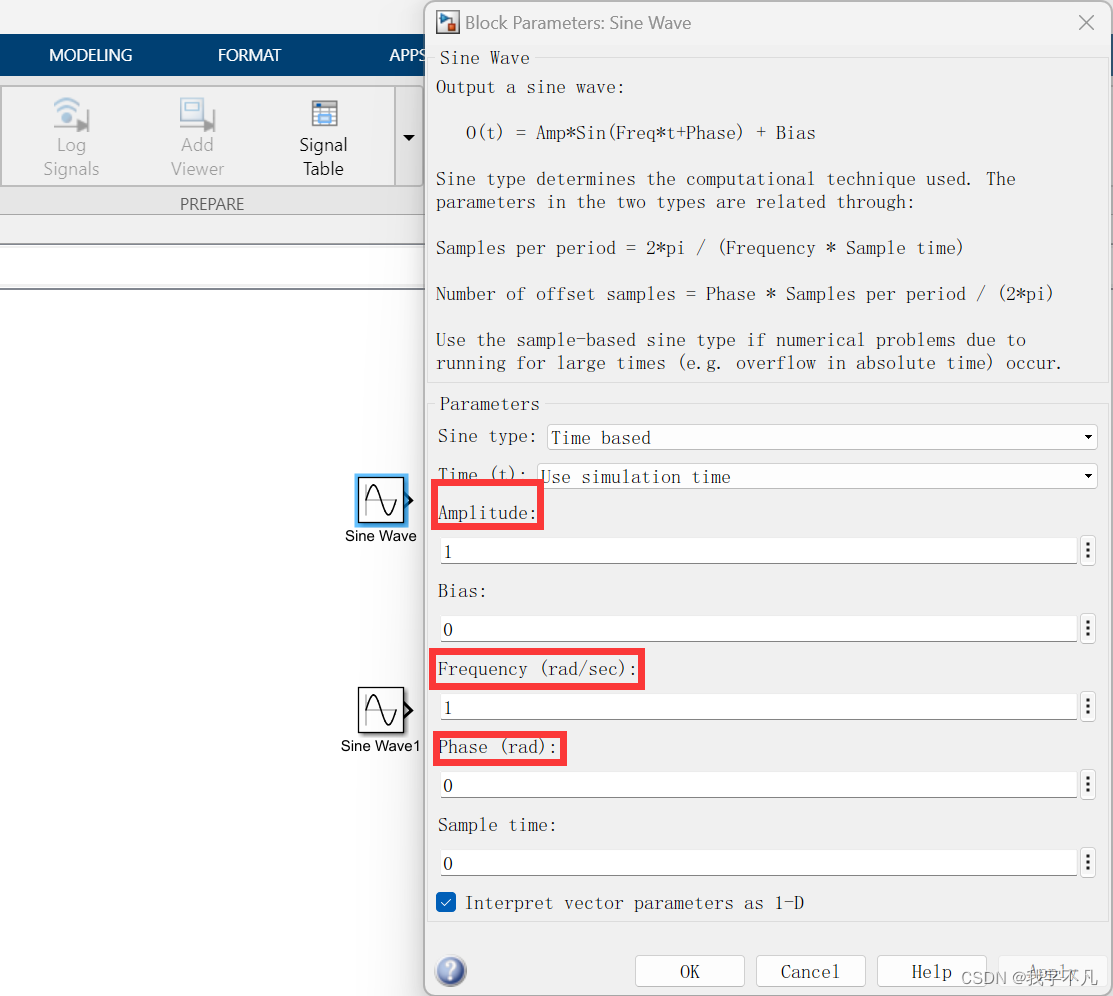
双击正弦信号发生器,进行信号参数的设置,(其中amplitude为幅度,frequency为频率,phase为相位)我们将第一个发生器设置为振幅为2,频率相位采用默认值,同样的方法设置第二个频率设置为2,相位设置为pi/2,设置完成后点击apply即。
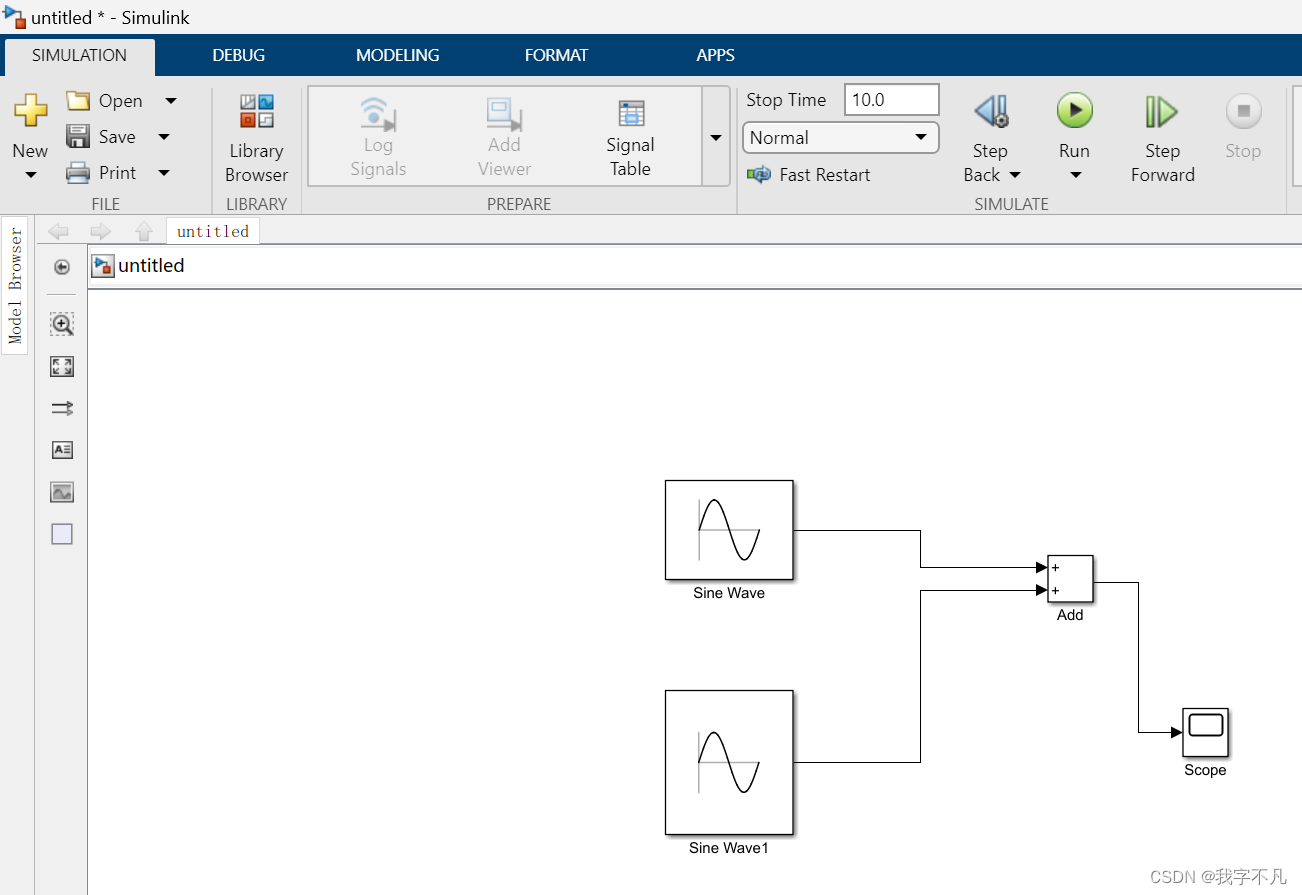
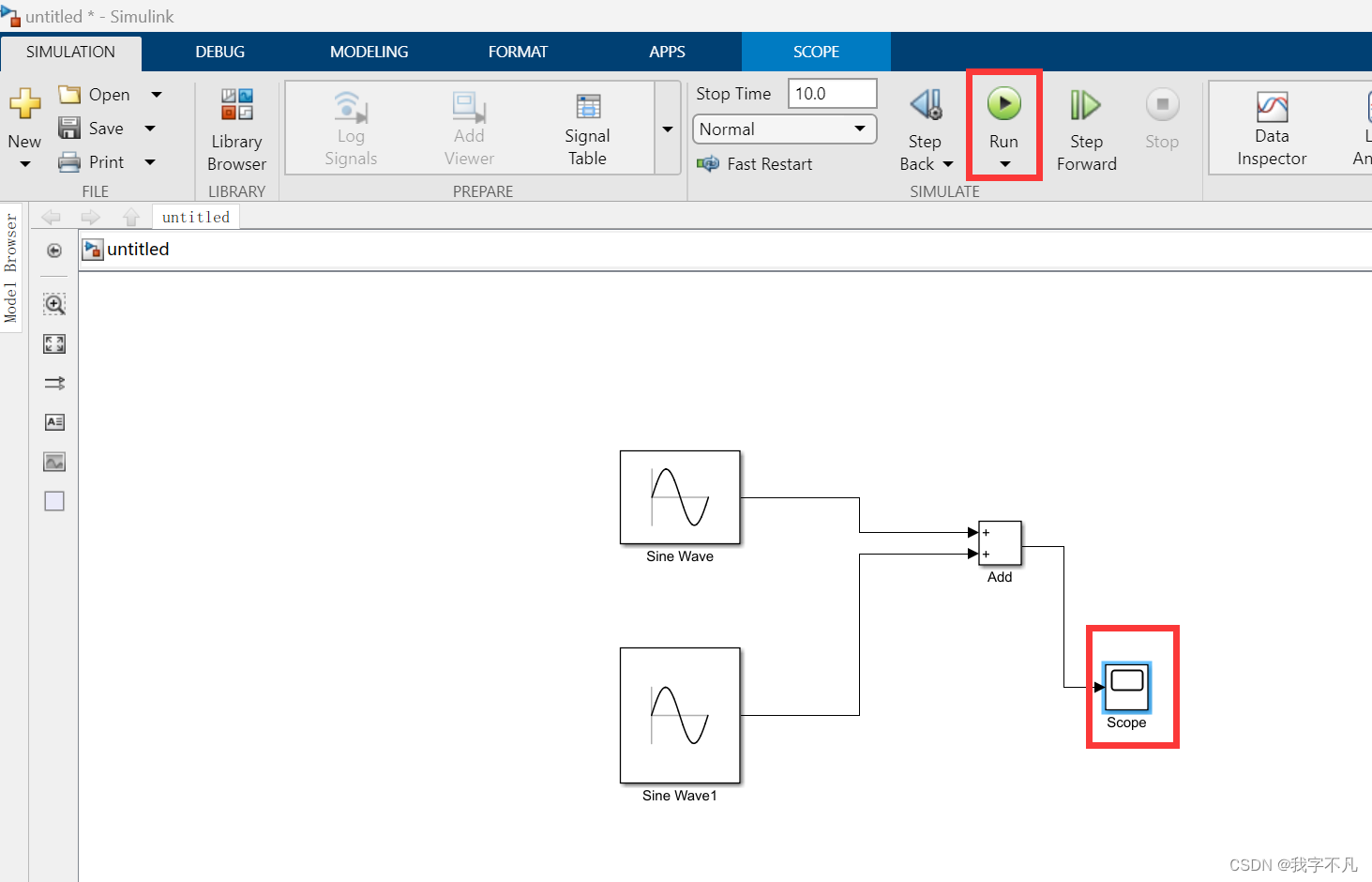
设置完成后将元件按规则相互连接
先点击工具栏中的run,运行程序,之后双击示波器,观察元器件的输出结果。
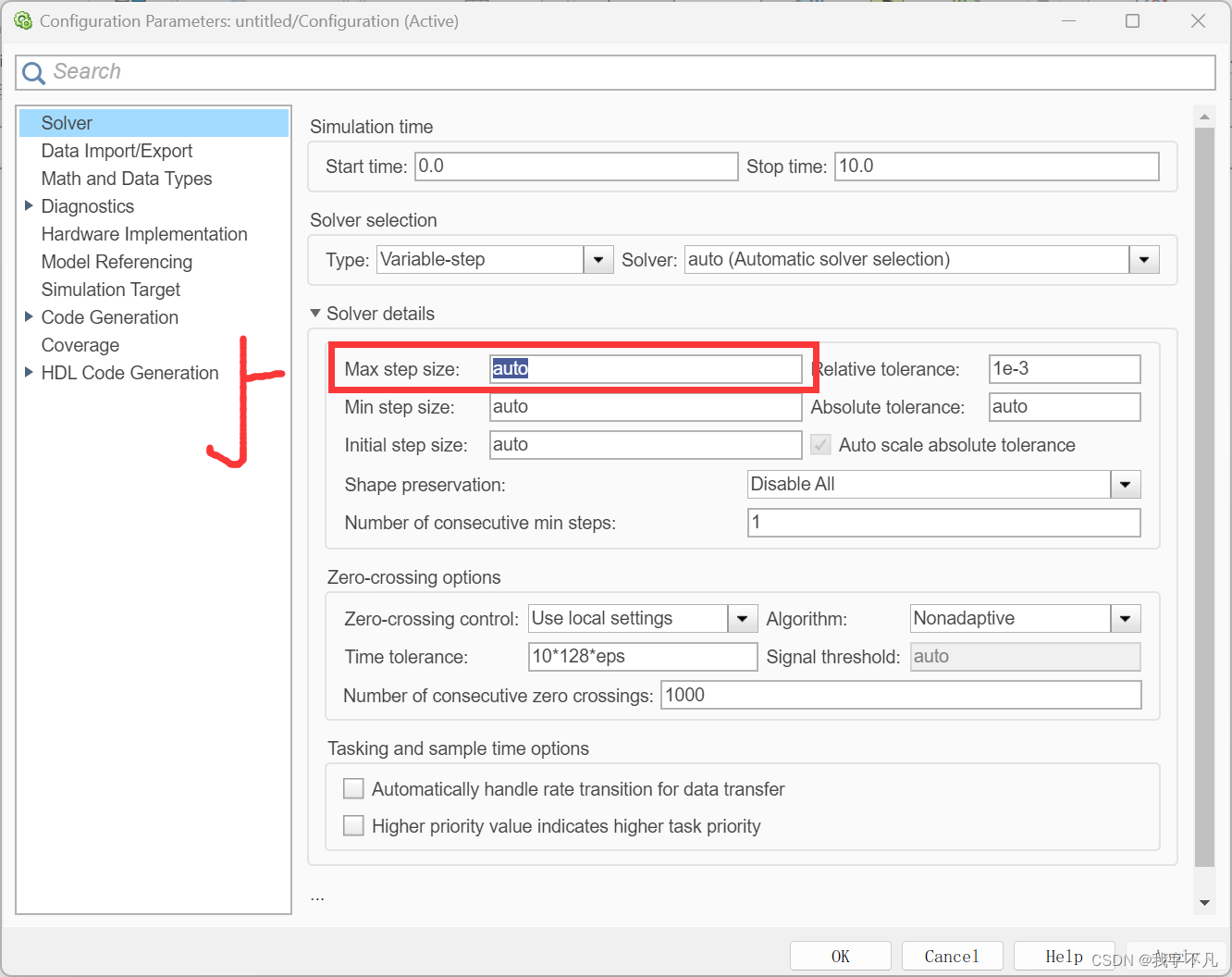
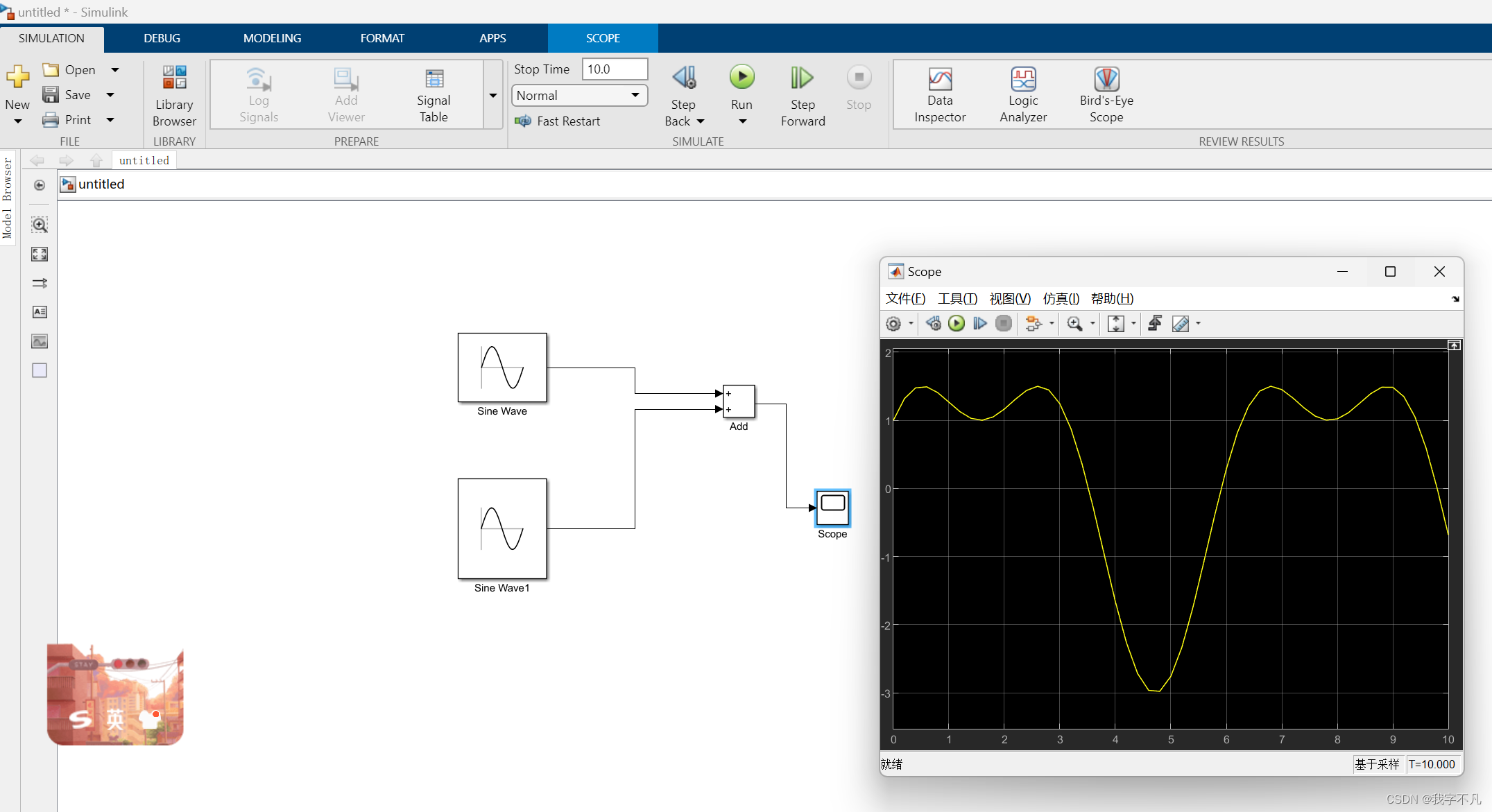 可以发现输出结果图像有些不平滑,这是由于最大步长的设置有点大,可以把最大步长理解为图像的单位长度,单位长度越小图像的精细化水平越高。
可以发现输出结果图像有些不平滑,这是由于最大步长的设置有点大,可以把最大步长理解为图像的单位长度,单位长度越小图像的精细化水平越高。
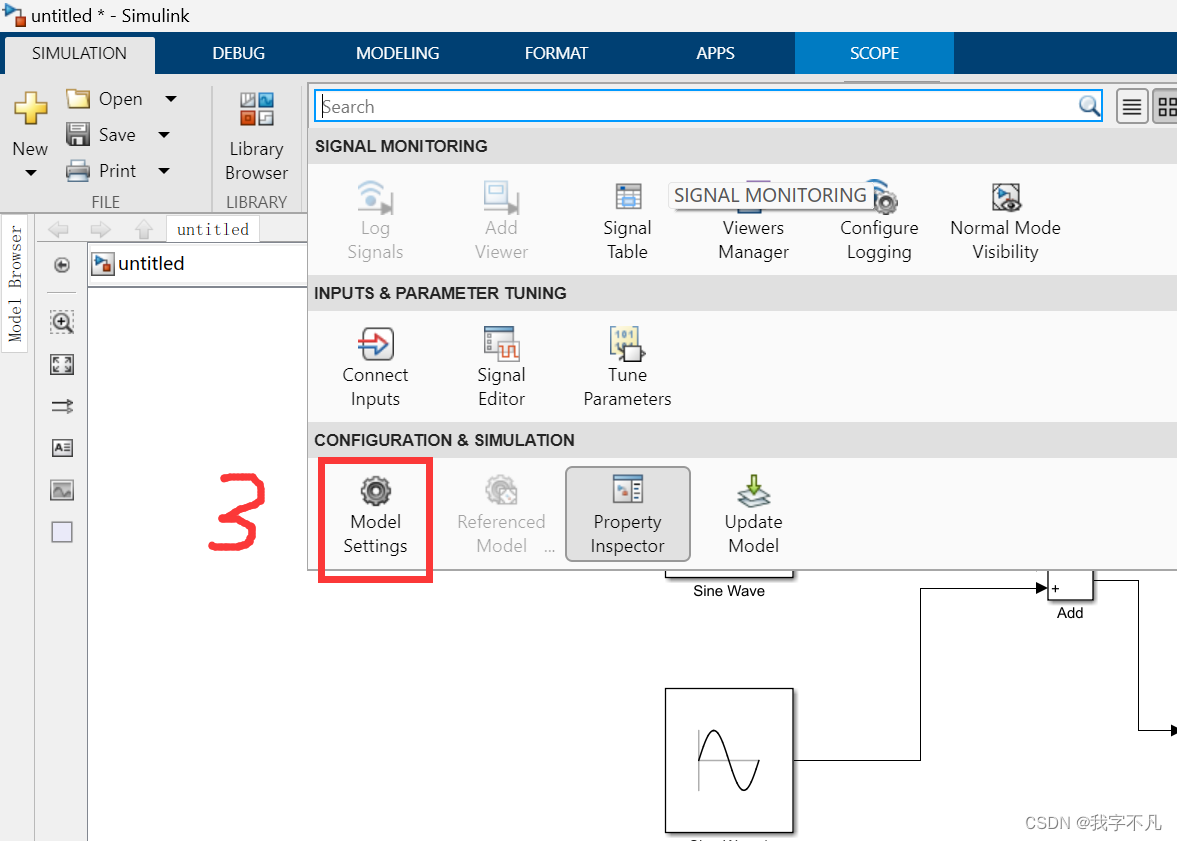
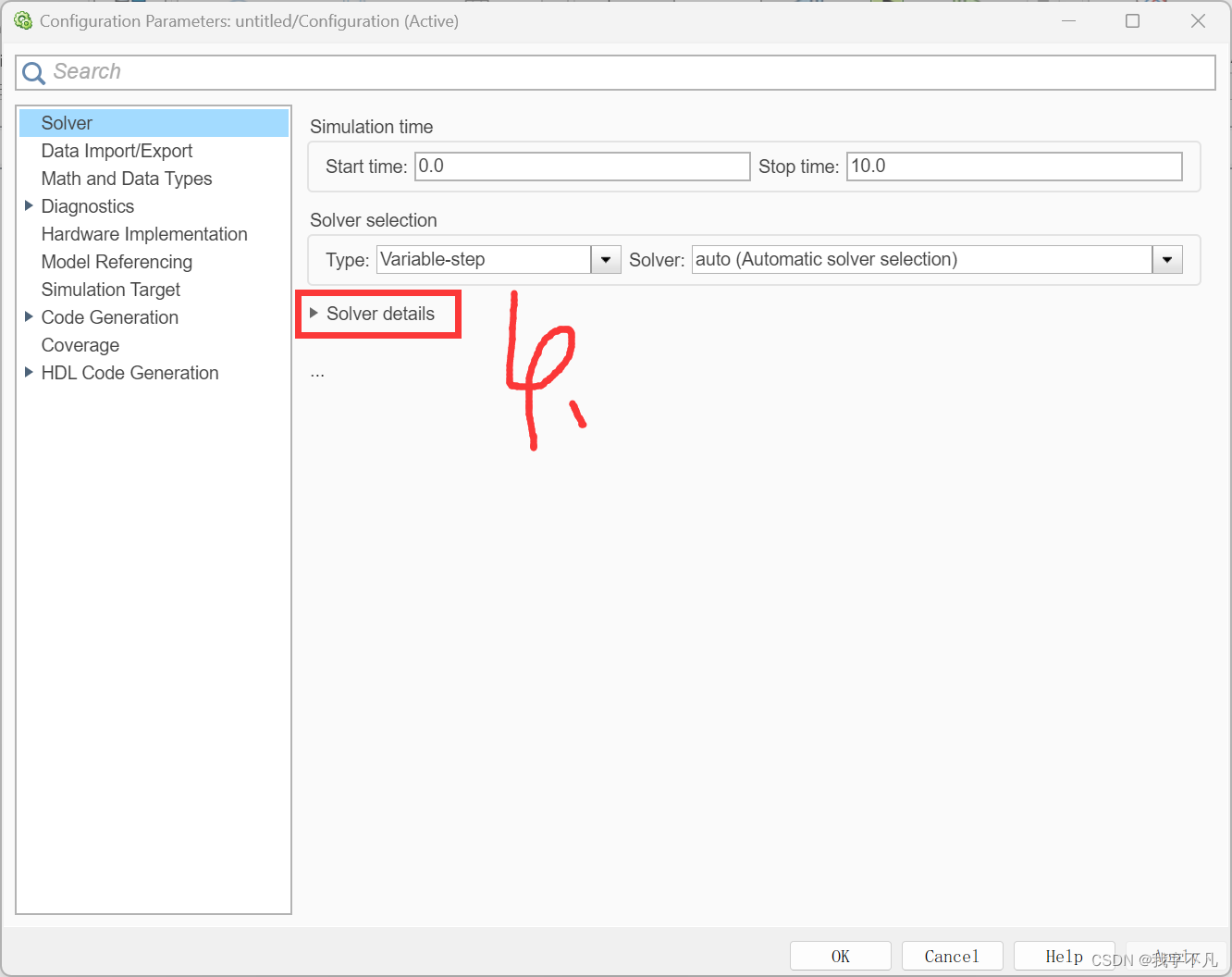
接下来设置最大步长,点击工具栏中的simulation->prepare向下的箭头->model settings->solver details(顺带提一下,同界面中的simulation time可以通过更改start time和stop time更改仿真的起止时间)->修改max step size中的值,将auto改为0.01->点击apply,完成最大步长的设置。

再次运行后观察示波器结果,可以发现图像的平滑程度更高了。
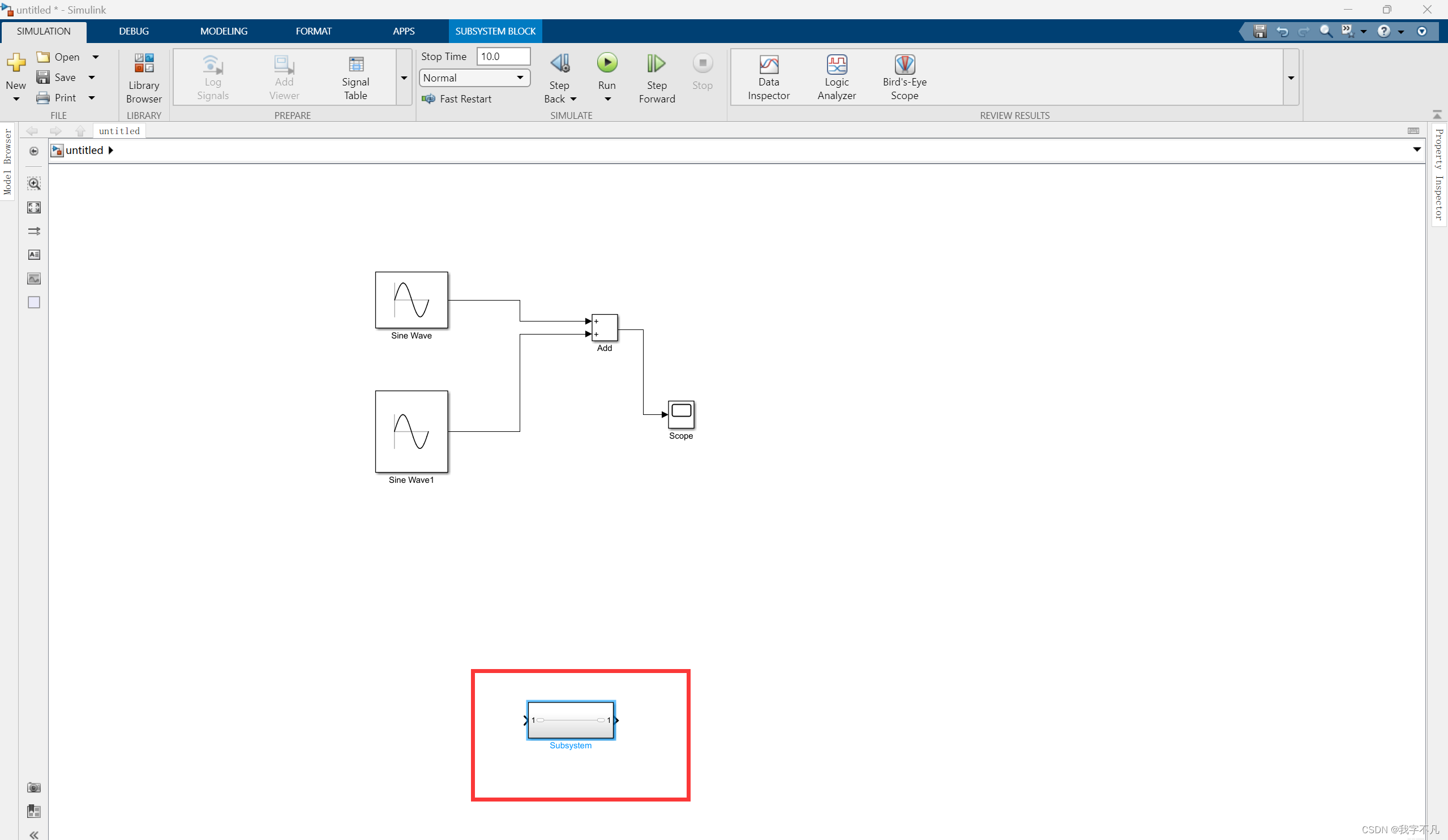
例:创建新模块
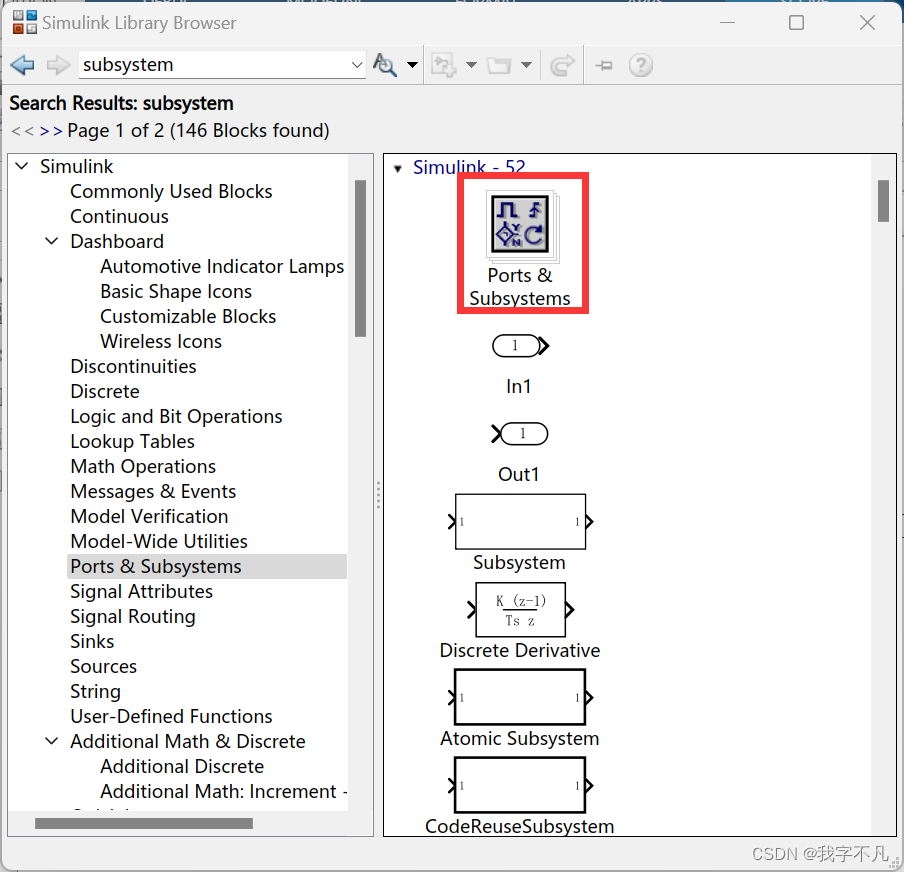
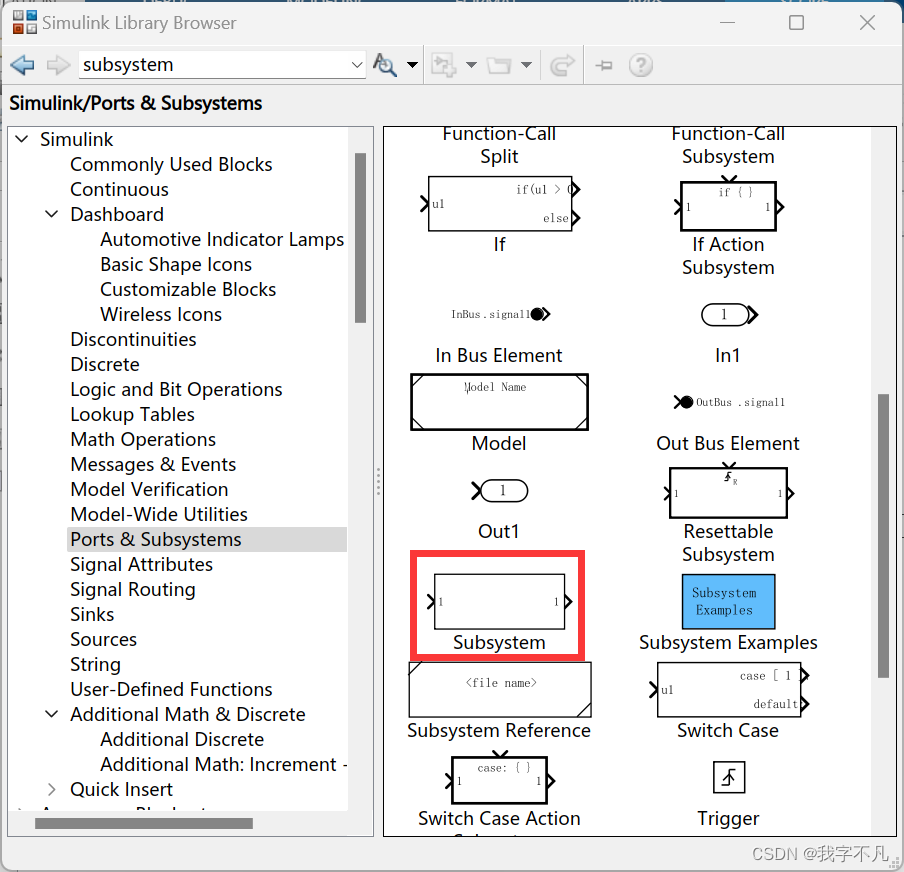
从模块库中选择subsystem(关键字检索后双击ports&subsystems进行进一步检索),将元件拖拽到指定位置
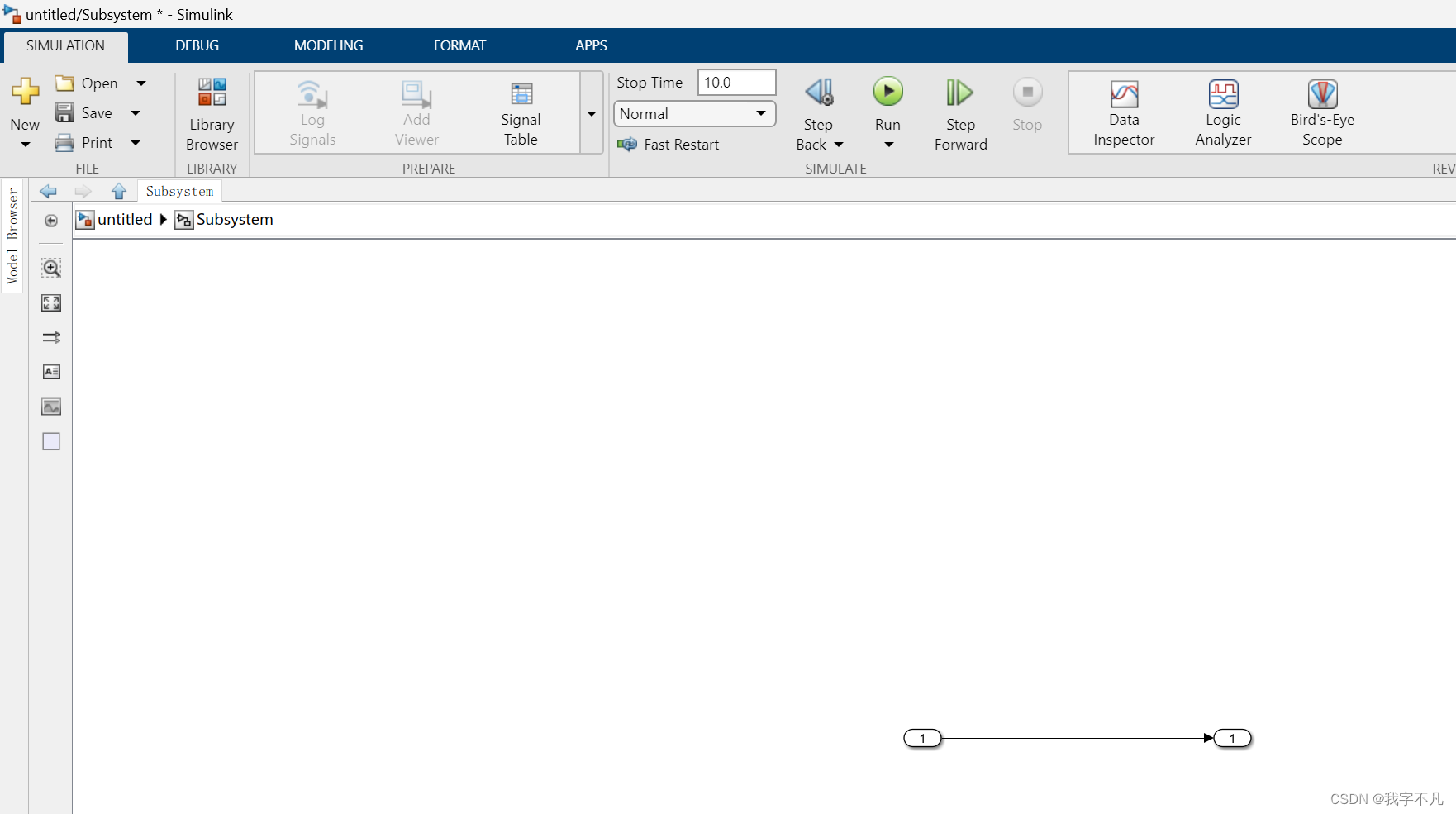
 双击subsystem,可以进行内部设计
双击subsystem,可以进行内部设计
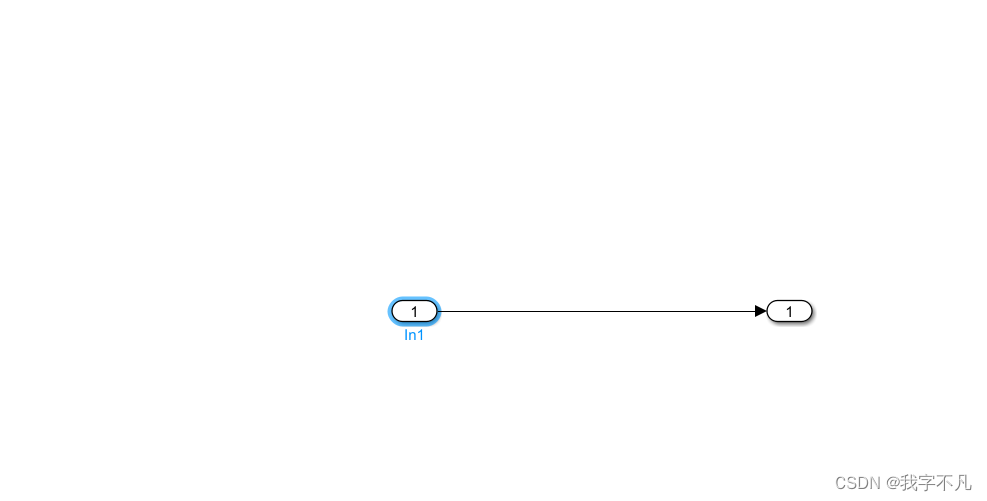
我们组装一个相加器,需要两个输入、相加器和一个输出,此时subsystem有了一个输入和一个输出,现在我们可以选中输入(1),ctrl+c,ctrl+v复制出一个新的输入
从元件中选择累加器拖拽进界面中,进行连线(选中线按退格可以将元件中的连线删除)
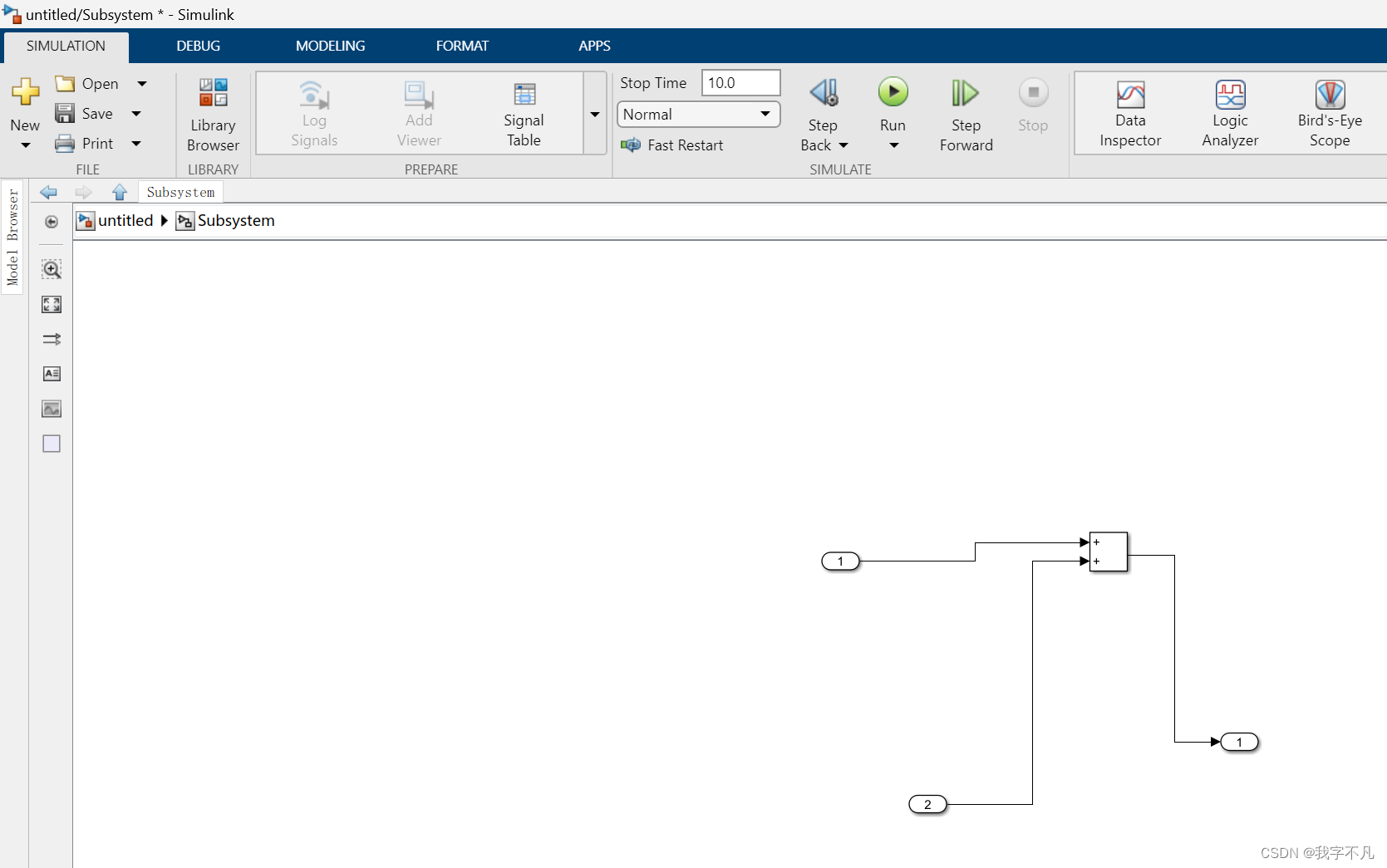
回到untitled界面,可以看到subsystem已经是两输入一输出的元器件了。