一、引言
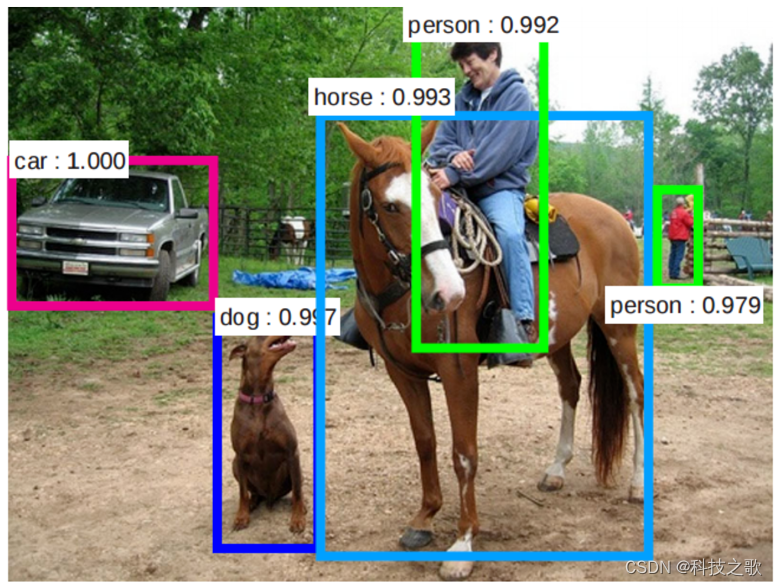
目标检测是计算机视觉领域中的一项重要任务,旨在从图像或视频中识别并定位出感兴趣的目标物体。随着深度学习技术的快速发展,目标检测算法取得了显著的进步,并在自动驾驶、智能安防、人脸识别等领域得到了广泛应用。本文将对目标检测算法的研究现状进行综述,分析多种检测算法的优势与不足,并探讨其发展趋势和研究方向。同时,将结合实际代码算法解释与实现,以期为读者提供深入的理解。
二、目标检测算法的分类与优势
目标检测算法大致可分为基于手工特征的传统方法和基于深度学习的现代方法两大类。
(一)基于手工特征的传统方法
传统方法主要依赖于手工设计的特征提取器和分类器。常见的特征包括Haar特征、HOG(梯度直方图特征)和LBP(局部二值模式特征)等。这些特征通过描述图像的局部纹理、形状等信息,实现对目标的检测。传统方法的优势在于其简单、易于实现,并且对于某些特定场景下的目标检测具有较好的效果。
然而,传统方法也存在一些不足。首先,手工设计的特征往往难以适应复杂多变的目标形态和背景环境。其次,传统方法在处理大规模数据集时效率较低,难以满足实时性要求较高的应用场景。
(二)基于深度学习的现代方法
近年来,随着深度学习技术的兴起,基于深度学习的目标检测算法逐渐成为主流。这类方法通过训练卷积神经网络(CNN)自动学习图像中的特征表示,并实现对目标的准确检测。现代方法的主要优势在于其强大的特征表示能力和泛化能力,能够处理复杂多变的目标形态和背景环境。
具体来说,基于深度学习的目标检测算法可以分为两大类:一阶段检测器和二阶段检测器。一阶段检测器如YOLO(You Only Look Once)和SSD(Single Shot MultiBox Detector)等,通过直接在图像上设置大量的预定义锚框(anchor boxes),并预测其类别和位置,实现快速的目标检测。二阶段检测器如Faster R-CNN(Faster Region-based Convolutional Neural Network)等,则首先通过区域建议网络(RPN)生成一系列候选区域,然后对每个候选区域进行分类和位置回归,实现更精确的目标检测。
三、目标检测算法的不足与挑战
尽管基于深度学习的目标检测算法取得了显著的进步,但仍存在一些不足和挑战。
(一)标注数据依赖
深度学习模型通常需要大量的标注数据进行训练,而标注数据的准备过程往往耗时且昂贵。这限制了深度学习模型在某些特定领域或场景下的应用。
(二)模型复杂度
深度学习模型通常具有较高的复杂度,需要较大的计算和存储资源。这限制了其在资源受限环境下的应用。同时,复杂的模型结构也增加了模型的训练难度和调参成本。
(三)小目标检测
在实际应用中,往往需要检测到不同尺寸的目标,包括较小的目标。然而,由于小目标在图像中所占比例较小,其特征信息较为有限,导致小目标的检测难度较大。
(四)鲁棒性不足
目标检测系统往往需要在不同的环境条件下工作,如光照变化、天气变化、图像噪声等。这些因素对目标检测系统的鲁棒性提出了挑战。如何提高目标检测算法在复杂环境下的性能是亟待解决的问题。
四、目标检测算法的发展趋势与研究方向
针对上述不足和挑战,目标检测算法的研究正朝着以下几个方向发展:
(一)小目标检测
针对小目标检测问题,研究者们提出了多种解决方案。例如,采用多尺度检测策略、特征增强技术、注意力机制等方法来提高小目标的检测准确率和鲁棒性。
(二)鲁棒性改进
为了提高目标检测算法的鲁棒性,研究者们引入了图像增强技术、特征选择和组合、模型自适应等方法。这些方法能够增强模型对复杂环境的适应能力,提高目标检测系统的稳定性和可靠性。
(三)高效的目标检测算法
针对深度学习模型在训练和推理阶段需要大量的计算资源的问题,研究者们提出了多种优化策略。例如,通过模型压缩、剪枝、量化等技术来减小模型的计算量和内存占用,提高目标检测算法的实时性和可部署性。
(四)多目标检测
在实际应用中,往往需要同时检测多个目标。因此,设计高效的多目标检测算法是未来的一个重要研究方向。研究者们可以利用目标之间的关联信息、集成深度学习和传统方法等技术来解决多目标检测问题。
(五)与多模态大模型的融合
多模态大模型在目标检测领域的应用日益广泛,它们通过结合文本、图像等多种模态的信息,提高了目标检测的准确性和效率。以下是关于GLIP、RLHF-V、RCBEVDet和GLEE等算法在目标检测上的简要介绍:

-
GLIP (Grounded Language-Image Pre-training)
- 算法特点:GLIP是一种多模态语言图像模型,它执行对比性预训练以学习语义丰富的表示,并在其模态之间对齐它们。与CLIP相比,GLIP旨在将方法扩展到对象级别的表示,即一个句子可能对应于图像中的多个对象。
- 应用:GLIP为零样本目标检测提供了灵活的框架,使得可以使用文本提示在给定的输入图像中找到感兴趣的对象或区域,且不受预定义类别的限制。
- 性能:在多个数据集上,GLIP在零样本领域转移性能上优于监督的Faster RCNN,并且在短语定位任务上也取得了优异的性能。
-
RLHF-V (Towards Trustworthy MLLMs via Behavior Alignment from Fine-grained Correctional Human Feedback)
- 算法特点:RLHF-V是一个全新的多模态大模型对齐框架,旨在从数据和算法层面显著减少多模态大模型中的"幻觉"问题,即模型在回答中出现与图片信息不符的内容。
- 应用:该框架通过引入人类反馈来对齐模型的行为,提高了模型回答的准确性和可信度。
- 性能 :经过RLHF-V框架训练的开源模型OmniLMM-12B在多个幻觉指标上取得了接近GPT-4V的水平。

-
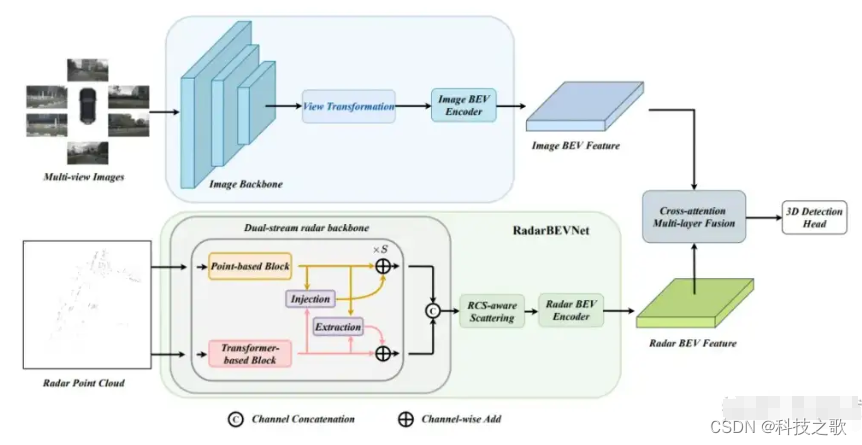
RCBEVDet
- 算法特点:RCBEVDet是一种结合环视相机和经济型毫米波雷达传感器的多模态3D目标检测新方法。其核心在于RadarBEVNet和Cross-Attention Multi-layer Fusion Module(CAMF)两个关键设计。
- 应用:RCBEVDet旨在解决环视相机在深度信息捕获和恶劣天气下的性能问题,通过融合雷达和相机的数据,实现了高精度、高效率和强鲁棒性的3D目标检测。
- 性能 :在nuScenes和VoD数据集上,RCBEVDet达到了雷达-相机多模态3D目标检测的新的最佳性能,同时在精度和速度之间实现了最佳平衡。
-
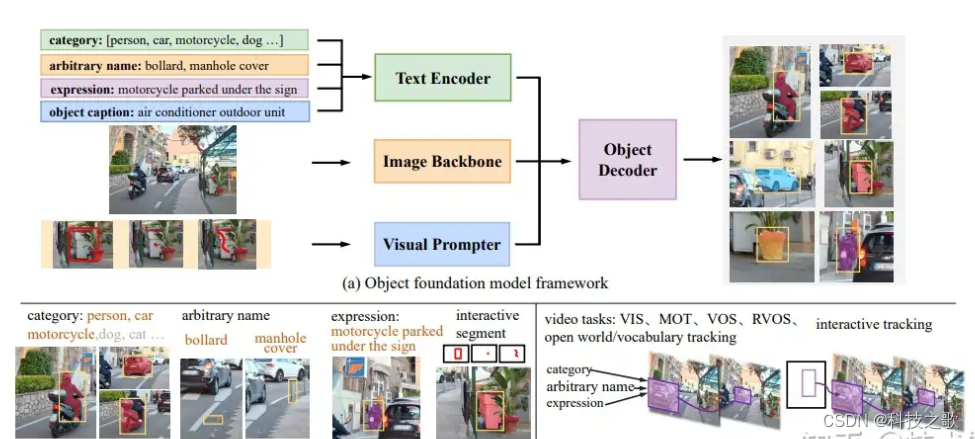
GLEE
- 算法特点:GLEE支持根据任意开放词表、目标的外观位置描述和多种交互方式进行目标检测、分割、跟踪,并在实现全能性的同时保持SOTA性能。
- 应用:GLEE的灵活性和全面性使得它能够在各种复杂场景下进行有效的目标检测和处理。
- 性能 :由于具体性能数据未在参考文章中提及,因此无法给出具体的性能指标。但基于其全能性和保持SOTA性能的描述,可以推测GLEE在目标检测领域具有出色的表现。
五、代码算法解释与实现
以下以Faster R-CNN算法为例,对目标检测算法的代码实现进行简要解释。
Faster R-CNN算法由区域建议网络(RPN)和Fast R-CNN检测器组成,通过共享卷积特征,实现了端到端的目标检测。以下是Faster R-CNN算法的主要步骤和代码实现概述:
1. 卷积特征提取
Faster R-CNN首先使用预训练的卷积神经网络(如VGG16、ResNet等)对输入图像进行特征提取,得到特征图(feature map)。
2. 区域建议网络(RPN)
RPN在特征图上滑动一个小型网络,生成一系列的候选区域(proposals)。每个候选区域都有一个与之对应的矩形框(bounding box)和得分(objectness score)。
代码实现(以PyTorch为例)
python
# 假设已经定义了RPN相关的层(如RPNConv, RPNHead等)
# 假设features是从backbone中提取的特征图
rpn_class_logits, rpn_bbox_preds = rpn(features)
# 使用RPN的预测结果生成候选区域(proposals)
proposals = rpn_generator(rpn_class_logits, rpn_bbox_preds, image_info)3. RoI Pooling/RoI Align
RoI Pooling或RoI Align用于从特征图中提取候选区域对应的特征,使得这些特征具有固定的尺寸,以便后续的分类和位置回归。
代码实现
python
# 假设已经定义了RoIPool或RoIAlign层
roi_pooled_features = roi_pool_layer(features, proposals)4. Fast R-CNN检测器
Fast R-CNN检测器对每个候选区域进行分类和位置回归。它首先使用全连接层对候选区域的特征进行进一步处理,然后输出每个候选区域的类别得分和边界框坐标。
代码实现
python
# 假设已经定义了Fast R-CNN相关的层(如classifier, bbox_regressor等)
class_logits, bbox_preds = fast_rcnn_head(roi_pooled_features)
# 对类别得分应用softmax得到概率分布
probs = F.softmax(class_logits, dim=1)
# 根据预测结果和真实标签计算损失(在训练阶段)
# ...5. 损失函数与优化
Faster R-CNN的损失函数包括RPN的分类损失、RPN的边界框回归损失、Fast R-CNN的分类损失和Fast R-CNN的边界框回归损失。在训练过程中,使用优化算法(如SGD、Adam等)对这些损失进行优化。
6. 非极大值抑制(NMS)
在得到所有候选区域的得分后,使用NMS算法去除重叠度过高的候选区域,得到最终的检测结果。
代码实现
python
# 假设已经有了一个NMS函数
final_detections = nms(proposals, probs, bbox_preds, nms_thresh)7. 发展趋势与研究方向推荐
- 轻量级模型:设计更轻量级的模型以减少计算量和内存占用,满足移动端和嵌入式设备的需求。
- 多模态融合:结合图像、文本、声音等多模态信息,提高目标检测的准确性和鲁棒性。
- 弱监督学习:利用更少的标注数据或弱标注数据进行训练,降低标注成本。
- 无监督学习:探索无监督学习方法在目标检测中的应用,实现模型的自我学习和进化。
- 3D目标检测:将目标检测扩展到三维空间,实现更准确的定位和姿态估计。
以上是对目标检测算法的研究现状、优势、不足、发展趋势和研究方向的概述,以及Faster R-CNN算法的代码实现简述。随着技术的不断进步和创新,目标检测领域将继续迎来更多的挑战和机遇。