Matrix Multiplication¶
主要内容:
块级矩阵乘法
多维指针算术
重新编排程序以提升L2缓存命
自动性能调整
Motivations¶
矩阵乘法是当今高性能计算系统的一个关键组件,在大多数情况下被用于构建硬件。由于该操作特别复杂,因此通常由软件提供商来进行实现,而不是使用者自己手动编写代码。这些库称为"内核库"(例如cuBLAS),可能会存在一定的版权限制,并且通常无法随意修改以适用于深度学习工作负载中的特殊需求(例如融合式活动函数)。本教程将带你了解如何使用 Triton 自行编写稳定、可扩展的矩阵乘法函数,以实现高性能计算系统所需的功能。
大概来说,我们将要写的内核实现下面这种固定步长算法,对一个(M、K)矩阵和一个(K、N)矩阵进行乘法运算:
python
# Do in parallel
for m in range(0, M, BLOCK_SIZE_M):
# Do in parallel
for n in range(0, N, BLOCK_SIZE_N):
acc = zeros((BLOCK_SIZE_M, BLOCK_SIZE_N), dtype=float32)
for k in range(0, K, BLOCK_SIZE_K):
a = A[m : m+BLOCK_SIZE_M, k : k+BLOCK_SIZE_K]
b = B[k : k+BLOCK_SIZE_K, n : n+BLOCK_SIZE_N]
acc += dot(a, b)
C[m : m+BLOCK_SIZE_M, n : n+BLOCK_SIZE_N] = acc在每个嵌套程序的每次递归过程中,Triton 实例都会产生一个专门的计算机程序来执行。
Compute Kernel¶
上面算法的实现在Triton上其实并不困难。只是内部迭代过程中,对于要从A和B缓存区读取数据的记忆位置计算这一步骤会有些复杂。为了实现该操作,我们需要使用多维指针运算方式。
指针数学运算符号¶
如果 X 是一个行向矩阵,那么Xi,j的存储位址为 &Xi,j = X + istride_xi + j stride_xj。因此,可以将Am:m+BLOCK_SIZE_M, k:k+BLOCK_SIZE_K和 Bk:k+BLOCK_SIZE_K, n:n+BLOCK_SIZE_N的块中存储地址表示成以下形式的虚拟代码:
python
&A[m : m+BLOCK_SIZE_M, k:k+BLOCK_SIZE_K] = a_ptr + (m : m+BLOCK_SIZE_M)[:, None]*A.stride(0) + (k : k+BLOCK_SIZE_K)[None, :]*A.stride(1);
&B[k : k+BLOCK_SIZE_K, n:n+BLOCK_SIZE_N] = b_ptr + (k : k+BLOCK_SIZE_K)[:, None]*B.stride(0) + (n : n+BLOCK_SIZE_N)[None, :]*B.stride(1);这意味着在Triton软件中,我们可以将A和B两个向量的指针分段设置为0(即i=0)。且需要注意的是,当M与数据握的大小BLOCK_SIZE_M不是相匹配的时候,我们可以通过添加一个额外模式来处理这种情况,例如,在数据中往底部加上一些无用的值。此后我们将为K维度使用遮蔽式载入操作进行处理。
python
offs_am = (pid_m * BLOCK_SIZE_M + tl.arange(0, BLOCK_SIZE_M)) % M
offs_bn = (pid_n * BLOCK_SIZE_N + tl.arange(0, BLOCK_SIZE_N)) % N
offs_k = tl.arange(0, BLOCK_SIZE_K)
a_ptrs = a_ptr + (offs_am[:, None]*stride_am + offs_k [None, :]*stride_ak)
b_ptrs = b_ptr + (offs_k [:, None]*stride_bk + offs_bn[None, :]*stride_bn)然后在内部循环中进行以下更新:
python
a_ptrs += BLOCK_SIZE_K * stride_ak;
b_ptrs += BLOCK_SIZE_K * stride_bk;二级缓存的优化措施
如上所述,每个程序实例都会计算出一组长度为BLOCK_SIZE_M,BLOCK_SIZE_N的C语言代码块。这种方式非常重要,因为执行顺序可能导致该程序中L2缓存的命中率不同,而且令人遗憾的是,如果我们使用矩阵增量式顺序执行代码,则其性能将会受到影响。
python
pid = tl.program_id(axis=0)
grid_n = tl.cdiv(N, BLOCK_SIZE_N)
pid_m = pid // grid_n
pid_n = pid % grid_n这根本不够用。
解决这个问题的一种方法是在排列块时采用数据重复使用的最佳组合。 我们可以"将所有 GROUP_M 行都集成到同一块中",然后再按照对应的列进行排序:
python
# Program ID
pid = tl.program_id(axis=0)
# Number of program ids along the M axis
num_pid_m = tl.cdiv(M, BLOCK_SIZE_M)
# Number of programs ids along the N axis
num_pid_n = tl.cdiv(N, BLOCK_SIZE_N)
# Number of programs in group
num_pid_in_group = GROUP_SIZE_M * num_pid_n
# Id of the group this program is in
group_id = pid // num_pid_in_group
# Row-id of the first program in the group
first_pid_m = group_id * GROUP_SIZE_M
# If `num_pid_m` isn't divisible by `GROUP_SIZE_M`, the last group is smaller
group_size_m = min(num_pid_m - first_pid_m, GROUP_SIZE_M)
# *Within groups*, programs are ordered in a column-major order
# Row-id of the program in the *launch grid*
pid_m = first_pid_m + ((pid % num_pid_in_group) % group_size_m)
# Col-id of the program in the *launch grid*
pid_n = (pid % num_pid_in_group) // group_size_m以下的矩阵乘法是每个矩阵块为九个,共有九个矩阵乘法操作。通过比较如果我们按行向量序排列输出的话,则需要在SRAM中加载90个元素来计算第一层的9个输出值,而若是以固定单元格为基础进行分组操作,只需加载54个元素。
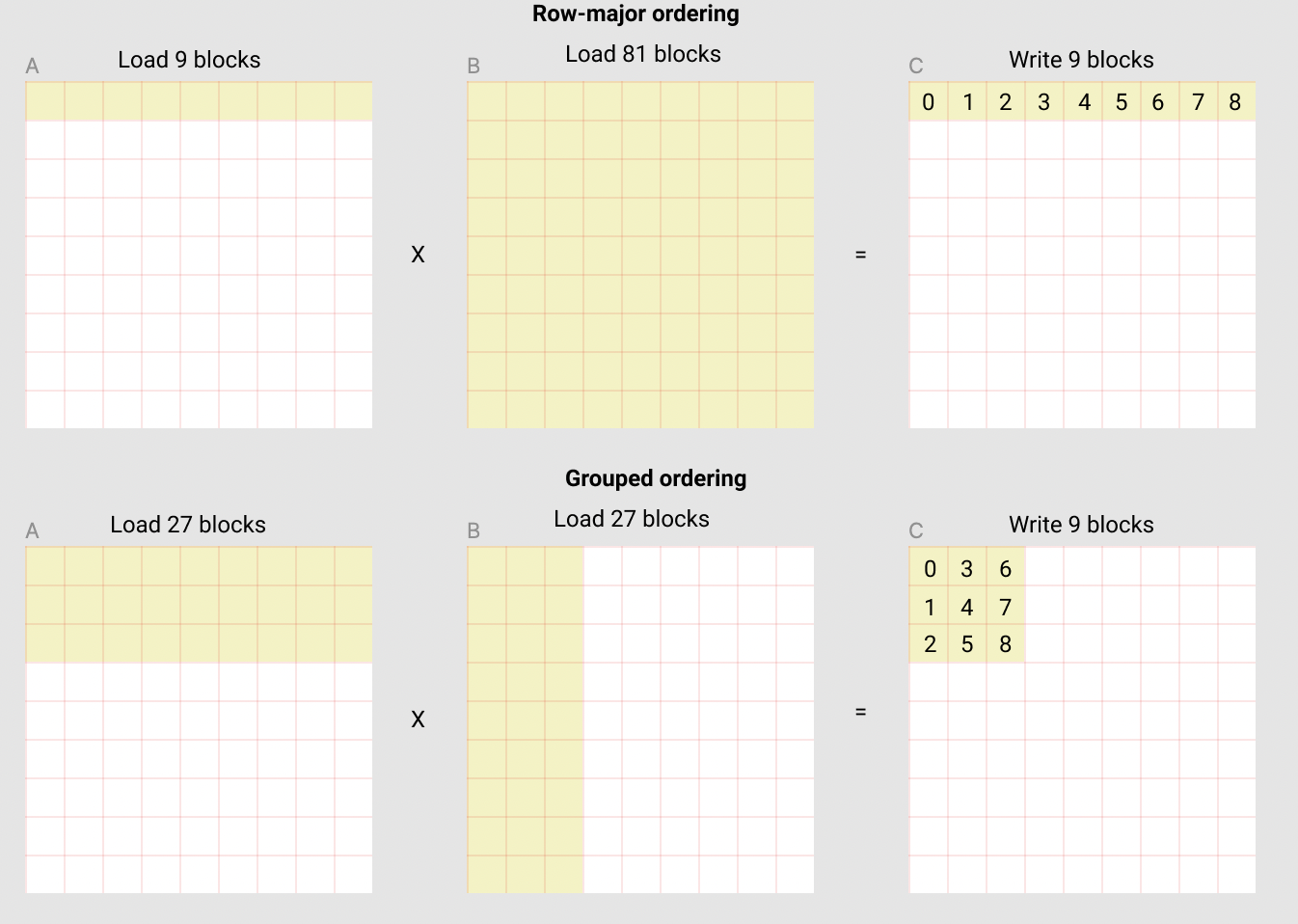
实际上,这会使我们矩阵乘法的算法执行效率提高超过10%(例如:A100在220至245TFLOPS之间)。
Final Result¶
python
import torch
import triton
import triton.language as tl
def is_cuda():
return triton.runtime.driver.active.get_current_target().backend == "cuda"
def is_hip_mi200():
target = triton.runtime.driver.active.get_current_target()
return target.backend == 'hip' and target.arch == 'gfx90a'
def get_cuda_autotune_config():
return [
triton.Config({'BLOCK_SIZE_M': 128, 'BLOCK_SIZE_N': 256, 'BLOCK_SIZE_K': 64, 'GROUP_SIZE_M': 8}, num_stages=3,
num_warps=8),
triton.Config({'BLOCK_SIZE_M': 64, 'BLOCK_SIZE_N': 256, 'BLOCK_SIZE_K': 32, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4),
triton.Config({'BLOCK_SIZE_M': 128, 'BLOCK_SIZE_N': 128, 'BLOCK_SIZE_K': 32, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4),
triton.Config({'BLOCK_SIZE_M': 128, 'BLOCK_SIZE_N': 64, 'BLOCK_SIZE_K': 32, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4),
triton.Config({'BLOCK_SIZE_M': 64, 'BLOCK_SIZE_N': 128, 'BLOCK_SIZE_K': 32, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4),
triton.Config({'BLOCK_SIZE_M': 128, 'BLOCK_SIZE_N': 32, 'BLOCK_SIZE_K': 32, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4),
triton.Config({'BLOCK_SIZE_M': 64, 'BLOCK_SIZE_N': 32, 'BLOCK_SIZE_K': 32, 'GROUP_SIZE_M': 8}, num_stages=5,
num_warps=2),
triton.Config({'BLOCK_SIZE_M': 32, 'BLOCK_SIZE_N': 64, 'BLOCK_SIZE_K': 32, 'GROUP_SIZE_M': 8}, num_stages=5,
num_warps=2),
# Good config for fp8 inputs.
triton.Config({'BLOCK_SIZE_M': 128, 'BLOCK_SIZE_N': 256, 'BLOCK_SIZE_K': 128, 'GROUP_SIZE_M': 8}, num_stages=3,
num_warps=8),
triton.Config({'BLOCK_SIZE_M': 256, 'BLOCK_SIZE_N': 128, 'BLOCK_SIZE_K': 128, 'GROUP_SIZE_M': 8}, num_stages=3,
num_warps=8),
triton.Config({'BLOCK_SIZE_M': 256, 'BLOCK_SIZE_N': 64, 'BLOCK_SIZE_K': 128, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4),
triton.Config({'BLOCK_SIZE_M': 64, 'BLOCK_SIZE_N': 256, 'BLOCK_SIZE_K': 128, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4),
triton.Config({'BLOCK_SIZE_M': 128, 'BLOCK_SIZE_N': 128, 'BLOCK_SIZE_K': 128, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4),
triton.Config({'BLOCK_SIZE_M': 128, 'BLOCK_SIZE_N': 64, 'BLOCK_SIZE_K': 64, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4),
triton.Config({'BLOCK_SIZE_M': 64, 'BLOCK_SIZE_N': 128, 'BLOCK_SIZE_K': 64, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4),
triton.Config({'BLOCK_SIZE_M': 128, 'BLOCK_SIZE_N': 32, 'BLOCK_SIZE_K': 64, 'GROUP_SIZE_M': 8}, num_stages=4,
num_warps=4)
]
def get_hip_autotune_config():
return [
triton.Config(
{'BLOCK_SIZE_M': 128, 'BLOCK_SIZE_N': 256, 'BLOCK_SIZE_K': 16, 'GROUP_SIZE_M': 1, 'waves_per_eu': 2},
num_warps=4, num_stages=0),
triton.Config(
{'BLOCK_SIZE_M': 256, 'BLOCK_SIZE_N': 256, 'BLOCK_SIZE_K': 16, 'GROUP_SIZE_M': 4, 'waves_per_eu': 2},
num_warps=8, num_stages=0),
triton.Config(
{'BLOCK_SIZE_M': 128, 'BLOCK_SIZE_N': 128, 'BLOCK_SIZE_K': 32, 'GROUP_SIZE_M': 1, 'waves_per_eu': 2},
num_warps=8, num_stages=0),
triton.Config(
{'BLOCK_SIZE_M': 64, 'BLOCK_SIZE_N': 128, 'BLOCK_SIZE_K': 32, 'GROUP_SIZE_M': 8, 'waves_per_eu': 3},
num_warps=4, num_stages=0),
triton.Config(
{'BLOCK_SIZE_M': 64, 'BLOCK_SIZE_N': 64, 'BLOCK_SIZE_K': 32, 'GROUP_SIZE_M': 1, 'waves_per_eu': 8},
num_warps=4, num_stages=0),
]
def get_autotune_config():
if is_cuda():
return get_cuda_autotune_config()
else:
return get_hip_autotune_config()
# `triton.jit`'ed functions can be auto-tuned by using the `triton.autotune` decorator, which consumes:
# - A list of `triton.Config` objects that define different configurations of
# meta-parameters (e.g., `BLOCK_SIZE_M`) and compilation options (e.g., `num_warps`) to try
# - An auto-tuning *key* whose change in values will trigger evaluation of all the
# provided configs
@triton.autotune(
configs=get_autotune_config(),
key=['M', 'N', 'K'],
)
@triton.jit
def matmul_kernel(
# Pointers to matrices
a_ptr, b_ptr, c_ptr,
# Matrix dimensions
M, N, K,
# The stride variables represent how much to increase the ptr by when moving by 1
# element in a particular dimension. E.g. `stride_am` is how much to increase `a_ptr`
# by to get the element one row down (A has M rows).
stride_am, stride_ak, #
stride_bk, stride_bn, #
stride_cm, stride_cn,
# Meta-parameters
BLOCK_SIZE_M: tl.constexpr, BLOCK_SIZE_N: tl.constexpr, BLOCK_SIZE_K: tl.constexpr, #
GROUP_SIZE_M: tl.constexpr, #
ACTIVATION: tl.constexpr #
):
"""Kernel for computing the matmul C = A x B.
A has shape (M, K), B has shape (K, N) and C has shape (M, N)
"""
# -----------------------------------------------------------
# Map program ids `pid` to the block of C it should compute.
# This is done in a grouped ordering to promote L2 data reuse.
# See above `L2 Cache Optimizations` section for details.
pid = tl.program_id(axis=0)
num_pid_m = tl.cdiv(M, BLOCK_SIZE_M)
num_pid_n = tl.cdiv(N, BLOCK_SIZE_N)
num_pid_in_group = GROUP_SIZE_M * num_pid_n
group_id = pid // num_pid_in_group
first_pid_m = group_id * GROUP_SIZE_M
group_size_m = min(num_pid_m - first_pid_m, GROUP_SIZE_M)
pid_m = first_pid_m + ((pid % num_pid_in_group) % group_size_m)
pid_n = (pid % num_pid_in_group) // group_size_m
# ----------------------------------------------------------
# Create pointers for the first blocks of A and B.
# We will advance this pointer as we move in the K direction
# and accumulate
# `a_ptrs` is a block of [BLOCK_SIZE_M, BLOCK_SIZE_K] pointers
# `b_ptrs` is a block of [BLOCK_SIZE_K, BLOCK_SIZE_N] pointers
# See above `Pointer Arithmetic` section for details
offs_am = (pid_m * BLOCK_SIZE_M + tl.arange(0, BLOCK_SIZE_M)) % M
offs_bn = (pid_n * BLOCK_SIZE_N + tl.arange(0, BLOCK_SIZE_N)) % N
offs_k = tl.arange(0, BLOCK_SIZE_K)
a_ptrs = a_ptr + (offs_am[:, None] * stride_am + offs_k[None, :] * stride_ak)
b_ptrs = b_ptr + (offs_k[:, None] * stride_bk + offs_bn[None, :] * stride_bn)
# -----------------------------------------------------------
# Iterate to compute a block of the C matrix.
# We accumulate into a `[BLOCK_SIZE_M, BLOCK_SIZE_N]` block
# of fp32 values for higher accuracy.
# `accumulator` will be converted back to fp16 after the loop.
accumulator = tl.zeros((BLOCK_SIZE_M, BLOCK_SIZE_N), dtype=tl.float32)
for k in range(0, tl.cdiv(K, BLOCK_SIZE_K)):
# Load the next block of A and B, generate a mask by checking the K dimension.
# If it is out of bounds, set it to 0.
a = tl.load(a_ptrs, mask=offs_k[None, :] < K - k * BLOCK_SIZE_K, other=0.0)
b = tl.load(b_ptrs, mask=offs_k[:, None] < K - k * BLOCK_SIZE_K, other=0.0)
# We accumulate along the K dimension.
accumulator = tl.dot(a, b, accumulator)
# Advance the ptrs to the next K block.
a_ptrs += BLOCK_SIZE_K * stride_ak
b_ptrs += BLOCK_SIZE_K * stride_bk
# You can fuse arbitrary activation functions here
# while the accumulator is still in FP32!
if ACTIVATION == "leaky_relu":
accumulator = leaky_relu(accumulator)
c = accumulator.to(tl.float16)
# -----------------------------------------------------------
# Write back the block of the output matrix C with masks.
offs_cm = pid_m * BLOCK_SIZE_M + tl.arange(0, BLOCK_SIZE_M)
offs_cn = pid_n * BLOCK_SIZE_N + tl.arange(0, BLOCK_SIZE_N)
c_ptrs = c_ptr + stride_cm * offs_cm[:, None] + stride_cn * offs_cn[None, :]
c_mask = (offs_cm[:, None] < M) & (offs_cn[None, :] < N)
tl.store(c_ptrs, c, mask=c_mask)
# We can fuse `leaky_relu` by providing it as an `ACTIVATION` meta-parameter in `matmul_kernel`.
@triton.jit
def leaky_relu(x):
return tl.where(x >= 0, x, 0.01 * x)我们现在可以创建一个操作简单的函数包装器,具有两个输入张量参数(), 该函数:(1)检查输入张量是否符合任何形状要求;(2)分配输出;(3)调用上面所示的核心计算。
python
def matmul(a, b, activation=""):
# Check constraints.
assert a.shape[1] == b.shape[0], "Incompatible dimensions"
assert a.is_contiguous(), "Matrix A must be contiguous"
M, K = a.shape
K, N = b.shape
# Allocates output.
c = torch.empty((M, N), device=a.device, dtype=torch.float16)
# 1D launch kernel where each block gets its own program.
grid = lambda META: (triton.cdiv(M, META['BLOCK_SIZE_M']) * triton.cdiv(N, META['BLOCK_SIZE_N']), )
matmul_kernel[grid](
a, b, c, #
M, N, K, #
a.stride(0), a.stride(1), #
b.stride(0), b.stride(1), #
c.stride(0), c.stride(1), #
ACTIVATION=activation #
)
return cUnit Test¶
我们可以对自定义的矩阵乘法运算与原生执行操作的Torch进行测试(即cuBLAS)。
python
torch.manual_seed(0)
a = torch.randn((512, 512), device='cuda', dtype=torch.float16)
b = torch.randn((512, 512), device='cuda', dtype=torch.float16)
triton_output = matmul(a, b)
torch_output = torch.matmul(a, b)
print(f"triton_output_with_fp16_inputs={triton_output}")
print(f"torch_output_with_fp16_inputs={torch_output}")
# Bigger tolerance for AMD MI200 devices.
# MI200 devices use reduced precision fp16 and bf16 and flush input and
# output denormal values to zero. Detailed info is at: https://pytorch.org/docs/stable/notes/numerical_accuracy.html#reduced-precision-fp16-and-bf16-gemms-and-convolutions-on-amd-instinct-mi200-devices
rtol = 1e-2 if is_hip_mi200() else 0
if torch.allclose(triton_output, torch_output, atol=1e-2, rtol=rtol):
print("✅ Triton and Torch match")
else:
print("❌ Triton and Torch differ")
TORCH_HAS_FP8 = hasattr(torch, "float8_e5m2")
if TORCH_HAS_FP8 and is_cuda():
torch.manual_seed(0)
a = torch.randn((512, 512), device="cuda", dtype=torch.float16)
b = torch.randn((512, 512), device="cuda", dtype=torch.float16)
a = a.to(torch.float8_e5m2)
# pre-transpose b for efficiency.
b = b.T
b = b.to(torch.float8_e5m2)
triton_output = matmul(a, b)
torch_output = torch.matmul(a.to(torch.float16), b.to(torch.float16))
print(f"triton_output_with_fp8_inputs={triton_output}")
print(f"torch_output_with_fp8_inputs={torch_output}")
if torch.allclose(triton_output, torch_output, atol=0.125, rtol=0):
print("✅ Triton and Torch match")
else:
print("❌ Triton and Torch differ")
python
triton_output_with_fp16_inputs=tensor([[-10.9531, -4.7109, 15.6953, ..., -28.4062, 4.3320, -26.4219],
[ 26.8438, 10.0469, -5.4297, ..., -11.2969, -8.5312, 30.7500],
[-13.2578, 15.8516, 18.0781, ..., -21.7656, -8.6406, 10.2031],
...,
[ 40.2812, 18.6094, -25.6094, ..., -2.7598, -3.2441, 41.0000],
[ -6.1211, -16.8281, 4.4844, ..., -21.0312, 24.7031, 15.0234],
[-17.0938, -19.0000, -0.3831, ..., 21.5469, -30.2344, -13.2188]],
device='cuda:0', dtype=torch.float16)
torch_output_with_fp16_inputs=tensor([[-10.9531, -4.7109, 15.6953, ..., -28.4062, 4.3320, -26.4219],
[ 26.8438, 10.0469, -5.4297, ..., -11.2969, -8.5312, 30.7500],
[-13.2578, 15.8516, 18.0781, ..., -21.7656, -8.6406, 10.2031],
...,
[ 40.2812, 18.6094, -25.6094, ..., -2.7598, -3.2441, 41.0000],
[ -6.1211, -16.8281, 4.4844, ..., -21.0312, 24.7031, 15.0234],
[-17.0938, -19.0000, -0.3831, ..., 21.5469, -30.2344, -13.2188]],
device='cuda:0', dtype=torch.float16)
✅ Triton and Torch match
triton_output_with_fp8_inputs=tensor([[-21.4375, 13.1719, 6.0352, ..., 28.7031, 8.6719, -40.7500],
[ 10.0000, 37.0000, -5.5664, ..., 20.9844, 46.8125, 30.8281],
[ 19.5625, -3.0078, -20.0469, ..., -2.1309, -8.0625, 12.5625],
...,
[-18.1562, -34.1562, -27.4219, ..., -27.3906, -24.0938, -12.3516],
[ -3.3945, -8.6250, -23.6562, ..., -4.1094, -3.5332, -16.0781],
[-23.9688, -3.2637, -33.6875, ..., 17.3125, -36.6250, 25.8594]],
device='cuda:0', dtype=torch.float16)
torch_output_with_fp8_inputs=tensor([[-21.4375, 13.1719, 6.0352, ..., 28.7031, 8.6719, -40.7500],
[ 10.0000, 37.0000, -5.5664, ..., 20.9844, 46.8125, 30.8281],
[ 19.5625, -3.0078, -20.0469, ..., -2.1309, -8.0625, 12.5625],
...,
[-18.1562, -34.1562, -27.4219, ..., -27.3906, -24.0938, -12.3516],
[ -3.3945, -8.6250, -23.6562, ..., -4.1094, -3.5332, -16.0781],
[-23.9688, -3.2637, -33.6875, ..., 17.3125, -36.6250, 25.8594]],
device='cuda:0', dtype=torch.float16)
✅ Triton and Torch matchBenchmark¶
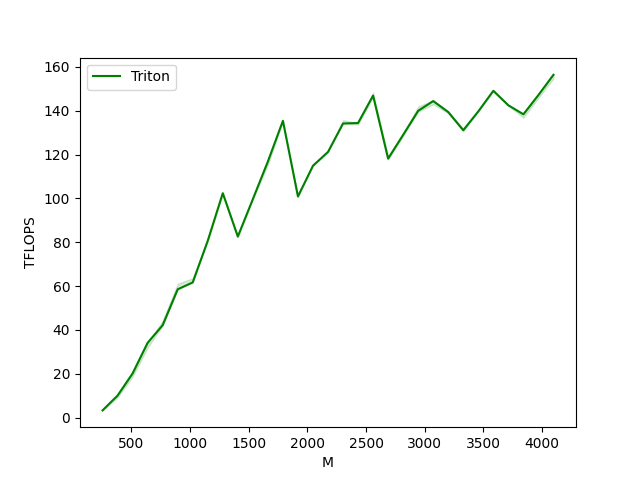
性能指标¶
我们可以对现有的内核与cuBLAS或rocBLAS进行比较,这里以对方阵为例,但也能够根据你自定义需求对其他矩阵形状进行性能测试。
python
ref_lib = 'cuBLAS' if is_cuda() else 'rocBLAS'
configs = []
for fp8_inputs in [False, True]:
if fp8_inputs and (not TORCH_HAS_FP8 or not is_cuda()):
continue
configs.append(
triton.testing.Benchmark(
x_names=["M", "N", "K"], # Argument names to use as an x-axis for the plot
x_vals=[128 * i for i in range(2, 33)], # Different possible values for `x_name`
line_arg="provider", # Argument name whose value corresponds to a different line in the plot
# Possible values for `line_arg`
# Don't compare to cublas for fp8 cases as torch.matmul doesn't support fp8 at the moment.
line_vals=["triton"] if fp8_inputs else [ref_lib.lower(), "triton"], # Label name for the lines
line_names=["Triton"] if fp8_inputs else [ref_lib, "Triton"], # Line styles
styles=[("green", "-"), ("blue", "-")],
ylabel="TFLOPS", # Label name for the y-axis
plot_name="matmul-performance-" +
("fp16" if not fp8_inputs else "fp8"), # Name for the plot, used also as a file name for saving the plot.
args={"fp8_inputs": fp8_inputs},
))
@triton.testing.perf_report(configs)
def benchmark(M, N, K, provider, fp8_inputs):
a = torch.randn((M, K), device='cuda', dtype=torch.float16)
b = torch.randn((K, N), device='cuda', dtype=torch.float16)
if TORCH_HAS_FP8 and fp8_inputs:
a = a.to(torch.float8_e5m2)
b = b.T
b = b.to(torch.float8_e5m2)
quantiles = [0.5, 0.2, 0.8]
if provider == ref_lib.lower():
ms, min_ms, max_ms = triton.testing.do_bench(lambda: torch.matmul(a, b), quantiles=quantiles)
if provider == 'triton':
ms, min_ms, max_ms = triton.testing.do_bench(lambda: matmul(a, b), quantiles=quantiles)
perf = lambda ms: 2 * M * N * K * 1e-12 / (ms * 1e-3)
return perf(ms), perf(max_ms), perf(min_ms)
benchmark.run(show_plots=True, print_data=True)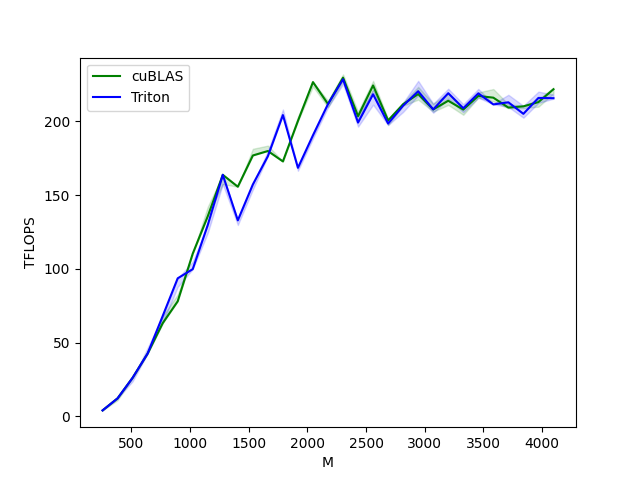
python
matmul-performance-fp16:
M N K cuBLAS Triton
0 256.0 256.0 256.0 4.096000 4.096000
1 384.0 384.0 384.0 12.288000 12.288000
2 512.0 512.0 512.0 26.214401 26.214401
3 640.0 640.0 640.0 42.666665 42.666665
4 768.0 768.0 768.0 63.195428 68.056616
5 896.0 896.0 896.0 78.051553 93.661869
6 1024.0 1024.0 1024.0 110.376426 99.864382
7 1152.0 1152.0 1152.0 135.726544 129.825388
8 1280.0 1280.0 1280.0 163.840004 163.840004
9 1408.0 1408.0 1408.0 155.765024 132.970149
10 1536.0 1536.0 1536.0 176.947204 157.286398
11 1664.0 1664.0 1664.0 179.978245 176.449258
12 1792.0 1792.0 1792.0 172.914215 204.353162
13 1920.0 1920.0 1920.0 200.347822 168.585369
14 2048.0 2048.0 2048.0 226.719125 190.650180
15 2176.0 2176.0 2176.0 211.827867 211.827867
16 2304.0 2304.0 2304.0 229.691080 228.592087
17 2432.0 2432.0 2432.0 203.583068 199.251522
18 2560.0 2560.0 2560.0 224.438347 218.453323
19 2688.0 2688.0 2688.0 200.704002 198.602388
20 2816.0 2816.0 2816.0 211.719459 210.696652
21 2944.0 2944.0 2944.0 218.579083 220.513412
22 3072.0 3072.0 3072.0 208.173173 208.173173
23 3200.0 3200.0 3200.0 214.046818 219.178074
24 3328.0 3328.0 3328.0 208.067338 208.973281
25 3456.0 3456.0 3456.0 217.308808 219.080343
26 3584.0 3584.0 3584.0 216.142772 211.565625
27 3712.0 3712.0 3712.0 209.428397 213.000737
28 3840.0 3840.0 3840.0 210.250955 205.179974
29 3968.0 3968.0 3968.0 213.142249 215.971570
30 4096.0 4096.0 4096.0 221.847481 215.784121
matmul-performance-fp8:
M N K Triton
0 256.0 256.0 256.0 3.276800
1 384.0 384.0 384.0 10.053818
2 512.0 512.0 512.0 20.164923
3 640.0 640.0 640.0 34.133334
4 768.0 768.0 768.0 42.130286
5 896.0 896.0 896.0 58.538665
6 1024.0 1024.0 1024.0 61.680940
7 1152.0 1152.0 1152.0 80.702267
8 1280.0 1280.0 1280.0 102.400003
9 1408.0 1408.0 1408.0 82.602666
10 1536.0 1536.0 1536.0 99.688560
11 1664.0 1664.0 1664.0 116.868992
12 1792.0 1792.0 1792.0 135.414749
13 1920.0 1920.0 1920.0 100.905113
14 2048.0 2048.0 2048.0 114.912434
15 2176.0 2176.0 2176.0 121.226797
16 2304.0 2304.0 2304.0 134.201527
17 2432.0 2432.0 2432.0 134.423269
18 2560.0 2560.0 2560.0 146.941707
19 2688.0 2688.0 2688.0 118.171514
20 2816.0 2816.0 2816.0 129.036114
21 2944.0 2944.0 2944.0 139.988852
22 3072.0 3072.0 3072.0 144.446699
23 3200.0 3200.0 3200.0 139.433550
24 3328.0 3328.0 3328.0 131.131689
25 3456.0 3456.0 3456.0 139.725414
26 3584.0 3584.0 3584.0 149.113421
27 3712.0 3712.0 3712.0 142.506914
28 3840.0 3840.0 3840.0 138.413021
29 3968.0 3968.0 3968.0 147.194128
30 4096.0 4096.0 4096.0 156.430916