商用清洁机器人的价值战。
随着行业发展势头回归冷静,"卖家秀"时代成为过去,机器人拼技术、拼产品的价值战时代已然到来。
庞大的前景是香饽饽也是镜中花
作为被业内寄予厚望的服务机器人之一,背后的信心是来自于明确的需求和庞大的市场前景。
一方面,随着城市化进程的推进和服务业比重提升,商场、写字楼等细分场景不断扩容,清洁需求也在同步增长;另一方面,随着人口老龄化的加剧,用工成本逐年上升,加之愿意从事清洁行业的人员越来越少,未来无人可用的情形已经可预见,同时,清洁需求的日益增长及清洁标准的提升,都让商用清洁机器人有着广阔的应用潜力。
根据相关研究,2020年,中国商用清洁机器人市场规模为58.1亿元,增速为120%;至2025年,国内市场规模将达到749.1亿元。然而,商用清洁机器人市场前景虽大,但,是香饽饽也是镜中花。如果无法提供出与市场相匹配的产品价值,所谓的前景便只是空谈。
再看当下机器人的发展现状,市场增长受挫无疑就是最好的写照,而造成这种状况的关键原因就是产品本身的问题。通过调查,现有产品大多有多方面的通病:清洁模式缺乏智能支持、安全性能不足、作业覆盖率低、部署维护成本高等,这些问题让机器人市场的发展变得后续乏力。
**清洁模式缺乏智能支持:**无论是商用清洁机器人还是家用扫地机器人,脏污识别一直是一个技术盲区。机器人的传感器无法感知场景中哪里脏、脏污是什么、哪里容易脏,所以都采用了平均化、全覆盖的清扫方案,然而这种"以勤补拙"的方式并不能完美解决用户的实际痛点,缺乏针对不同脏污的应对策略;
**安全性能不足:**面对常见的高透类障碍物(玻璃护栏、玻璃墙等)、高危场景(自动扶梯、转门等)以及超市中的掉落的物品、狭窄通道、货架等类似障碍物或场景时,现有机器人的避障效果和稳定性往往不足;
**作业覆盖率低:**现有的商用清洁机器人几乎均是中大型的产品形态,而较大的体型意味着机器人无法进入到复杂、狭窄的过道、桌椅、闸机等区域,在死角清洁、地面护理方面不能完全替代人力;
**部署维护成本高:**机器人在正式使用前,需要专门的工程师进行现场部署,加上后续的培训,整个环节较为繁琐,需要花费大量的时间和成本。而变更场景格局后,需要工程师重新部署,后续维护成本也较高。
从光环加身,到问题缠身,商用清洁机器人需要一次产品力革命。
智效赋能,让服务机器人服务于人
让机器人发挥应有的价值,让需求回归最初的模样。在种种噱头之下,商用清洁机器人被加上了诸多本不属于它的光环,也让机器人逐渐偏离了发展方向。市场最本质的需求就是清洁,而商用清洁机器人的价值就是解决清洁。

来自对于行业痛点的深度理解,INDEMIND认为不应只对现有技术方案做裱糊,而应从底层架构出发,重塑产品逻辑,或许是更快解决问题的有效方式。因此,围绕智能、高效、安全这个几个维度,INDEMIND通过全栈自研视觉多维架构、VSLAM算法、视觉一体化模组等,构建了一套以视觉为核心的系统化技术方案,「商用机器人AI Kit」。
该方案是面向服务机器人的视觉AI软硬件解决方案,根据应用平台,能够依靠纯视觉或视觉多维架构,实现机器人导航、定位、决策、交互等核心功能的开发,能够广泛应用于商用清洁、酒店配送、送餐、巡检等商用服务机器人平台。
让机器人更智能
不同于现有方案,基于独有的视觉为主的多传感器融合架构,结合VSLAM算法,赋予了机器人自主实时三维建图能力,能够支持实时构建全场景二维地图、三维地图及语义地图,且精度可达厘米级。
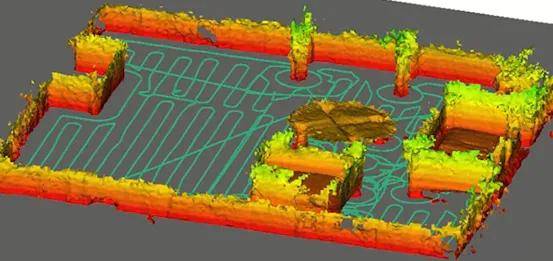
最为重要的是,借助它强大的自主实时建图能力,不再需要技术人员的参与,无需部署,开机即可使用,同时不再担心场景内部结构发生变化,机器人还能够自主更新地图,大大提升机器人的使用体验。这是全球首个免部署商用机器人系统,单台可节省超3k美金部署和支持成本。

此外,INDEMIND商用机器人方案和家用机器人方案均集成了行业首创的脏污识别技术。通过结合图像算法,支持任何地面材质、花色、光线下的透明、半透明,不透明液体及干涸污渍识别、颗粒状脏污识别、粉末状脏污识别。而基于识别结果,系统能够针对脏污类型和脏污程度自主决策清洁策略,提升清洁质量和覆盖率。



 标题在清洁过程中,机器人能够将脏污检测结果及位置与场景地图和轨迹进行叠加,实现全场景的脏污地图管理
标题在清洁过程中,机器人能够将脏污检测结果及位置与场景地图和轨迹进行叠加,实现全场景的脏污地图管理
让机器人更高效
体型上的天然限制,让机器人无法进入到狭窄区域,因此,通过加入一台小型机器人成为了厂商们的普遍解决方案,但如何让两台甚至多台机器人做到相互协作,动作默契却需要针对性研发。而INDEMIND方案已经集成了自研的成熟化机器人协作开放平台。
通过研发机器人协作开放平台,能够让任何符合标准的机器人设备实现与平台下其他机器人进行多机通信,以保证在同一环境下安全高效的协同工作,避免干扰以及事故风险。同时在作业方面,支持位置信息共享、自主调度、协调作业等。
让机器人更安全
针对机器人安全问题,INDEMIND基于设备端、云端智能决策平台、大数据平台三端专门建立了一套智能决策引擎,能够根据关键数据不断更新算法模型,持续提升场景处理和问题应对能力。借助微秒级的智能决策引擎,机器人能够稳定检测各类障碍物,支持低矮障碍物避障(地插、桌椅底座等);高反障碍物避障(玻璃、镜面等);全高障碍物避障(桌面、警戒线等),同时机器人还能够实时进行潜在风险判断(行人等),根据风险分类,提前做出规避策略,实现主动安全,保障机器人在复杂环境下安全运行。
以技术创新为原点,提升智效表现,赋能机器人工具价值,让服务机器人真正服务于人。