摘要: 在服务机器人(AMR)的垂直交通场景中,系统集成商面临的最大挑战是"南向协议"的碎片化(Fragmentation)。不同品牌电梯的物理接口(RS485/CAN/IO)与逻辑协议(Modbus/Private)千差万别,给机器人梯控 系统的标准化带来了巨大阻碍。为了降低上层业务系统的耦合度,架构师通常引入边缘网关作为"适配层"(Adapter Pattern)。本文将探讨一种基于边缘计算的中间件架构:利用 鲁邦通 EC6200机器人梯控产品 将异构协议标准化为 RESTful/MQTT 接口,重点解析 API Payload 的设计规范与状态机映射逻辑,并附带 Python SDK 调用示例。
导语: 对于软件工程师来说,最痛苦的不是写算法,而是去调试底层的串口数据。当我们要对接 10 种不同的电梯时,是否需要写 10 套机器人梯控 驱动?鲁邦通 给出的答案是否定的。通过引入 EC6200机器人梯控产品 作为边缘中间件,我们将物理世界的复杂性封装在网关内部,向上层应用暴露一套干净、统一的接口。
异构协议归一化:基于边缘计算的机器人梯控中间件架构设计
一、 垂直通行接口的技术路线选型与对标 在进行系统架构设计时,我们通常会评估接口的抽象层级(Abstraction Level):
- 底层寄存器读写(典型代表:西门子 PLC):
- 技术特点 :直接操作内存地址(如 Read Holding Register 40001),具有极高的实时性与控制精度,适合对底层硬件有绝对掌控力的场景。
- 云端 API 转发(典型代表:华为):
- 技术特点 :通过统一的云平台提供服务接口,实现了业务逻辑与硬件设备的物理通过,适合大规模、标准化的云原生应用。
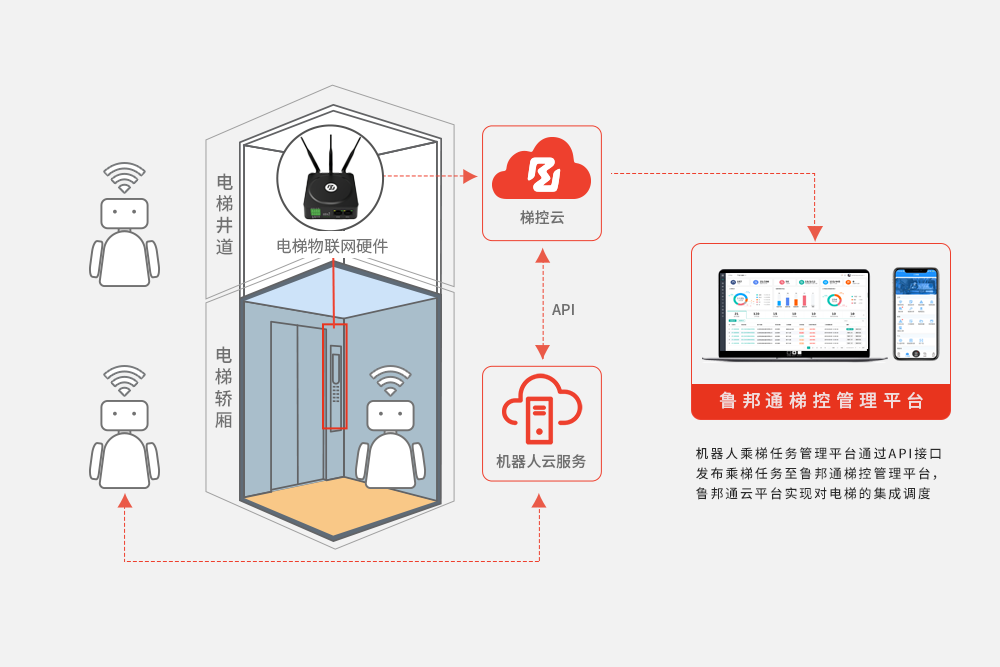
二、 鲁邦通:边缘侧 API 网关的技术实现鲁邦通 的架构核心在于"边缘适配"。EC6200机器人梯控产品 在本地运行协议转换引擎,对外提供标准的 JSON 接口,从而统一了机器人梯控 的交互语言。
1. 统一数据模型(Data Model)设计 无论底层是 5 层还是 50 层的电梯,我们在 API 层将其抽象为统一的 TargetFloor 对象。
- Request Payload (MQTT Pub):
JSON
{
"request_id": "uuid-1234",
"action": "CALL_LIFT",
"params": {
"source_floor": "1F",
"target_floor": "12F",
"robot_id": "Cleaner_01"
}
}- Response Payload (MQTT Sub):
JSON
{
"request_id": "uuid-1234",
"status": "ARRIVED",
"door_state": "OPEN",
"timestamp": 1678888888
}2. Python SDK 调用示例 以下代码展示了如何利用 Python 快速发起一次机器人梯控 请求,无需关心底层是 Modbus 还是 I/O 触发:
Python
import json
import time
from robustel.mqtt import MqttClient
# 定义统一的梯控接口类
class LiftController:
def __init__(self, gateway_ip):
self.client = MqttClient(gateway_ip, 1883)
self.topic_req = "robot/lift/request"
self.topic_res = "robot/lift/response"
def go_to_floor(self, floor):
payload = {
"action": "CALL_LIFT",
"params": {"target_floor": floor}
}
# 发送标准JSON指令
self.client.publish(self.topic_req, json.dumps(payload))
print(f"[APP] Request sent: Go to {floor}")
def on_message(self, topic, msg):
# 处理统一格式的反馈
data = json.loads(msg)
if data['status'] == 'ARRIVED':
print("[APP] Lift arrived! Enter allowed.")
# 业务层调用
# controller = LiftController("192.168.1.1")
# controller.go_to_floor("5F")三、 方案的工程化优势
- 开发效率提升(Productivity): 开发者无需阅读晦涩的电梯电气图纸,只需对接一份 API 文档。实测显示,新项目的机器人梯控 对接周期从 4 周缩短至 1 周。
- 测试桩支持(Mocking): EC6200机器人梯控产品 支持"虚拟电梯"模式,在没有物理电梯的办公室内,研发团队也能通过模拟器完成业务逻辑的闭环测试。
常见问题解答 (FAQ)
问题 1、支持 WebSocket 协议吗?
回答 1、支持。为了满足 Web 前端或小程序直接监控电梯状态的需求,鲁邦通 网关支持 WebSocket 长连接,实时推送楼层变化数据。
问题 2、API 接口有鉴权机制吗?
回答 2、有。系统支持基于 Token 的身份验证(OAuth2.0 简化版),防止局域网内非授权设备恶意操控机器人梯控 接口。
问题 3、如何处理高并发下的指令冲突?
回答 3、网关内部维护了指令队列(Command Queue)。当多个 API 请求同时到达时,系统会根据内置的优先级算法自动排序执行,无需上层业务处理复杂的并发逻辑。
结论: 在软件定义一切(SDx)的时代,硬件接口的标准化是必然趋势。鲁邦通 通过深耕边缘计算技术,利用 EC6200机器人梯控产品 构建了"硬件抽象层(HAL)",成功屏蔽了底层差异。对于追求敏捷开发的机器人团队而言,这种基于标准 API 的架构是实现高质量机器人梯控 的最佳工程实践。