【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
这种mcu的嵌入式模块理论上都是私有协议,因为上位机和下位机都是自己开发的,所以只需要自己保证上、下位机可以通讯上,没有问题就行。但是现在有一个情况,那就是如何实现这个协议。现在我们是选择了ttl作为通信的方式,下面要做的就是如何用ttl实现通信协议。
1、上、下位机分开测试
前面准备好了通信的协议,各自就可以独立开发了。上位机可以用利用虚拟com进行测试,自己写一个假的下位机。而下位机呢,则可以通过串口工具来进行测试。一般来说,下位机如果测试没有问题了,才会去找上位机进行联合调试,不然调试的效率就太低了。
对于下位机来说,只要串口工具ok了,那么上位机不管是qt,还是mfc、c# wpf,只要按照协议把数据发下来,那就应该没问题的。
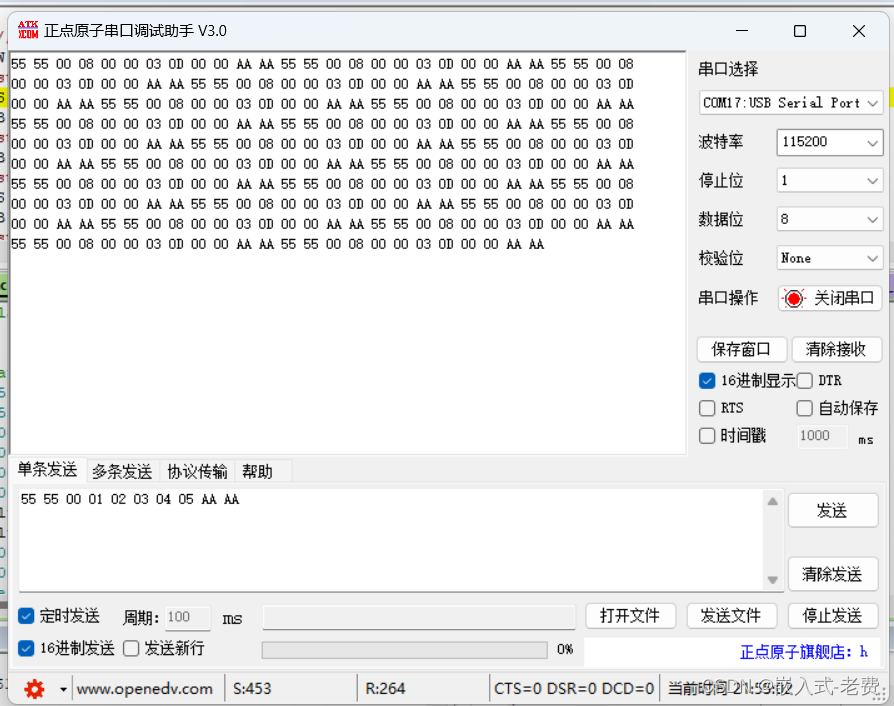
2、调试的时候一般都是通过16进制调试的
通常来说,发送的协议就是8位无符号数据,不是字符串。所以这个时候调试的时候,不管是接收命令,还是发送命令,最好都是通过16进制进行调试。
3、上位机一般是主动的那一方
通常来说,上位机都是主动的那一方。不管是去读数据,还是写数据,上位机都是主动发起请求的一方。这个时候,对于下位机来说,回复好上位机的问题,给出相应的答案就可以了。
4、压力测试是一定要的
协议解析的过程有可能出现不对的地方,这是很常见的。而且,随着开发的进行,有可能添加各种不同样的协议内容。所以不管哪一种协议,我们在实现和验证的时候,一定要进行压力测试,即通过串口工具周期性发送一些命令,这些都是可以的。单挑发送、多条发送、随机发送,一般的上位机工具都会支持这样的测试。
5、使用fsm去解析协议
串口的属性,决定了我们是一个、一个去接收数据的。这个时候就要求我们,需要根据这些单个的数据来判断它是否符合协议的要求。要做到这一点,最好的方法就是用有限状态机fsm去实现。比如说,首先是什么状态,接收到一个数据,应该是什么状态,是继续维持,还是说继续走向下一个状态。一般来说,只要状态机设计好,基本上固件都是非常稳定的。
void receiveUartData(void) // receive data and parse data here
{
int index = 0;
if (USART_ReadIntFlag(USART_UX, USART_INT_RXBNE) == SET)
{
g_rx_buffer[0] = USART_RxData(USART_UX); /* receive one byte data*/
switch(uartState)
{
case HEAD_STATE1: // wait 0x55
if(g_rx_buffer[0] == 0x55)
{
g_usart_rx_buf[0] = g_rx_buffer[0];
g_usart_rx_sta ++;
uartState = HEAD_STATE2;
}
else
{
g_usart_rx_sta = 0;
}
break;
case HEAD_STATE2: // wait another 0x55
if(g_rx_buffer[0] == 0x55)
{
g_usart_rx_buf[1] = g_rx_buffer[0];
g_usart_rx_sta ++;
uartState = TAIL_STATE1;
}
else
{
g_usart_rx_sta = 0;
uartState = HEAD_STATE1;
}
break;
case TAIL_STATE1: // wait 0xaa
if(g_usart_rx_sta >= 32)
{
g_usart_rx_sta = 0;
uartState = HEAD_STATE1;
break;
}
g_usart_rx_buf[g_usart_rx_sta] = g_rx_buffer[0];
g_usart_rx_sta ++;
if(g_rx_buffer[0] == 0xaa)
{
uartState = TAIL_STATE2;
}
break;
case TAIL_STATE2: // wait another 0xaa
g_usart_rx_buf[g_usart_rx_sta] = g_rx_buffer[0];
g_usart_rx_sta ++;
if(g_rx_buffer[0] == 0xaa && useFlag == 0) /* if useFlag = 0 or not qualified data, just drop it directly*/
{
for(index = 0; index < g_usart_rx_sta; index++)
{
transferBuf[index] = g_usart_rx_buf[index];
}
bufLen = g_usart_rx_sta;
useFlag = 1;
}
g_usart_rx_sta = 0;
uartState = HEAD_STATE1;
break;
default:
break;
}
USART_ClearIntFlag(USART_UX, USART_INT_RXBNE);
}
}6、协议的处理可以放到main里面继续进行
中断部分只是负责数据的接收,具体命令的解析可以放到main函数里面继续执行。毕竟接收数据本身是在中断函数处理的,这部分花的时间越少越好。而具体的数据解析,实时性没那么高,慢一点都是没有关系的。
extern uint16_t voltage; // add by feixiaoxing
int parseData() // use app tool to test the data
{
unsigned char str[32] = {0};
if(useFlag == 0)
{
return -1;
}
if(0 == bufLen)
{
setFlag();
return -1;
}
if(bufLen < 4)
{
setFlag();
return -1;
}
if(transferBuf[0] != 0x55 || transferBuf[1] != 0x55)
{
setFlag();
return -1;
}
if(transferBuf[bufLen-2] != 0xaa || transferBuf[bufLen-1] != 0xaa)
{
setFlag();
return -1;
}
if(bufLen != 10) // header + length + commandid + crc + tail
{
setFlag();
return -1;
}
// restore flag
setFlag();
// prepare data
str[ 0] = 0x55; // header
str[ 1] = 0x55;
str[ 2] = 0x00; // length
str[ 3] = 0x08;
str[ 4] = 0x00; // command id;
str[ 5] = 0x00;
str[ 6] = voltage / 1000; // data
str[ 7] = voltage % 1000;
str[ 8] = 0x00; // crc
str[ 9] = 0x00;
str[10] = 0xaa; // tail
str[11] = 0xaa;
outputData((char*)str, 12);
return 0;
}