在FPGA程序中,Handshake(握手)和Register(寄存器)是两种不同的通信和数据传输机制。它们各有特点和适用场景。以下是它们的区别和应用场景的详细解释:
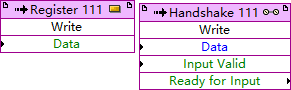
Register(寄存器)
特点:
-
简单易用:寄存器是最基本的数据存储和传输方式,可以直接在LabVIEW FPGA中创建和使用。
-
低延迟:由于寄存器是硬件实现的,数据传输速度非常快,延迟很低。
-
单周期操作:通常寄存器的读写操作可以在一个时钟周期内完成,非常适合需要快速读写的数据。
-
单向数据传输:寄存器通常用于单向的数据传输,即从一个模块写入数据到寄存器,另一个模块读取数据。
应用场景:
-
配置参数传递:寄存器常用于传递和存储配置参数,例如滤波器的系数、PWM的占空比等。
-
状态信号传递:用于传递系统的状态信号,例如当前的工作模式、错误状态等。
-
快速数据交换:在需要快速读写数据的场合,寄存器是非常理想的选择,例如在控制回路中传递实时控制信号。
使用示例:
假设你需要在FPGA中传递一个控制信号(如使能信号)给某个模块,可以使用寄存器来实现。
Handshake(握手)
特点:
-
双向通信:握手机制通常用于双向通信,确保数据发送和接收的同步。
-
可靠性:通过握手信号,可以确保数据已经成功接收,适合需要高可靠性的数据传输。
-
复杂性:握手机制相比寄存器要复杂一些,需要设计握手信号的时序和逻辑。
-
适合大数据量传输:在传输较大数据量时,通过握手机制可以确保每一块数据都被正确接收,不会丢失。
应用场景:
-
数据块传输:在传输大数据块(如图像数据)时,握手机制可以确保每一块数据都被正确接收和处理。
-
异步通信:在不同时钟域之间传输数据时,握手机制可以确保数据的可靠性。
-
实时数据传输:在需要实时数据传输且要求高可靠性的场合,握手机制是非常适用的。
使用示例:
假设你需要在FPGA中传输一个数据块,可以使用握手机制确保数据的正确接收。
区别总结
| 特点 | 寄存器 (Register) | 握手 (Handshake) |
|---|---|---|
| 数据方向 | 单向 | 双向 |
| 延迟 | 低 | 较高 |
| 复杂性 | 低 | 高 |
| 适用场景 | 快速数据交换、状态信号传递、配置参数传递 | 大数据量传输、异步通信、实时数据传输 |
| 可靠性 | 较低 | 高 |
具体应用案例
-
寄存器应用案例:在一个FPGA控制的PWM电路中,需要通过LabVIEW界面实时调整PWM的占空比。可以使用寄存器来传递占空比参数,从LabVIEW界面写入寄存器,FPGA模块读取寄存器值并调整PWM输出。
-
握手应用案例:在一个图像处理系统中,FPGA需要从摄像头模块接收图像数据并处理。使用握手机制,确保每一帧图像数据都被成功接收并处理完毕后,再接收下一帧。这样可以避免数据丢失,确保处理的图像数据完整和正确。
通过了解寄存器和握手的区别和各自的应用场景,可以更好地选择适合的通信机制,提高FPGA程序的性能和可靠性。