近期,一项来自北京理工大学和北京师范大学的团队公布了一项创新性的研究成果,他们将惯性测量单元(IMU)和图像处理算法相结合,显著提升了非均匀相机抖动下图像去模糊的准确性。
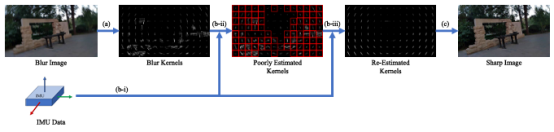

研究团队利用IMU捕捉相机的运动数据,通过建立不同图像区域间模糊核的非线性变换关系模型,科学家们提出了一种新的利用IMU辅助的模糊核重估方法。该方法通过优化问题,结合邻近区域已准确估计的模糊核,对估计不足的模糊核进行修正和优化。
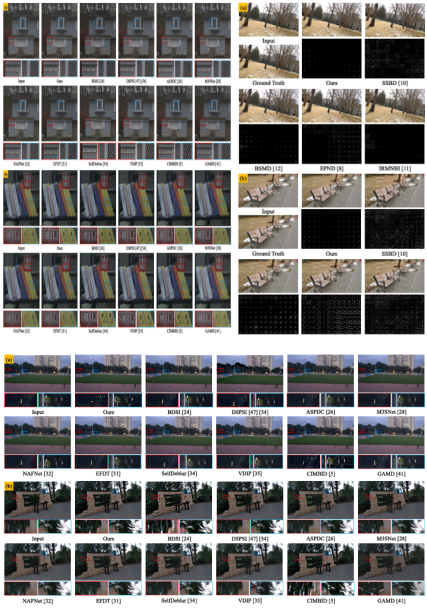
实验结果显示,这种基于IMU辅助的模糊核重估方法在处理图像去模糊时,其性能超越了现有的同类技术,尤其是在处理非均匀相机抖动造成的复杂模糊情况下表现尤为突出。该技术不仅提高了模糊核估计的准确性,还为图像去模糊算法提供了一种新的优化途径。
