相机支持的传感器
在 RVC2 上,固件必须具有传感器配置才能支持给定的相机传感器。目前,我们支持下面列出的相机传感器的开箱即用(固件中)传感器配置。
| 名称 | 分辨率 | 传感器类型 | 尺寸 | 最大 帧率 |
|---|---|---|---|---|
| IMX378 | 4056×3040 | 彩色 | 1/2.3" (11.0 mm) | 85 (@ 2024×1520) |
| OV9282 | 1280x800 | 单色 | 1/4" (6.3 mm) | 120 (@ 640x400) |
| IMX214 | 4208x3120 | 彩色 | 1/3.06" (8.3 mm) | 35 (@ 1920x1080) |
| OV7251 | 640x480 | 单色 | 1/7.5" (3.4 mm) | 117 (@ 640x400) |
| IMX477 | 4056x3040 | 彩色 | 1/2.3" (11.0 mm) | 60 (@ 1920x1080) |
| OV9782 | 1280x800 | 彩色 | 1/4" (6.3 mm) | 120 (@ 640x400) |
| AR0234 | 1920x1200 | 彩色 | 1/2.6" (9.8 mm) | 60 (@ 1920x1200) |
| IMX582 | 5312x6000 | 彩色 | 1/1.2" (21.2 mm) | 42 (@ 3840x2160) |
| IMX462 | 1920x1080 | 彩色 | 1/2.8" (9.1 mm) | 30 (@ 1920x1080) |
| IMX577 | 4056x3040 | 彩色 | 1/2.3" (11.0 mm) | 60 (@ 1920x1080) |
其他传感器
驱动程序/调优可用,但尚未测试/集成:
| 传感器 | 状态 | 快门 | 分辨率 |
|---|---|---|---|
| IMX334 | 未经测试 | 卷帘快门 | 3840x2160 |
| IMX390 | 未经测试 | 卷帘快门 | 1937x1217 |
| IMX412 | 未经测试 | 卷帘快门 | 4056x3040 |
| SC2232H | 未经测试 | 卷帘快门 | 1936x1086 |
| OV2735 | 未经测试 | 卷帘快门 | 1920x1080 |
| SC5335 | 未经测试 | 卷帘快门 | 2592x1944 |
| SC8238 | 未经测试 | 卷帘快门 | 3840x2160 |
相机特性
1. 传感器尺寸
传感器尺寸是指传感器对角线的长度。较大的传感器可以捕获更多的光线,因此可以产生更好的图像质量:更好的低光性能和更高的分辨率。
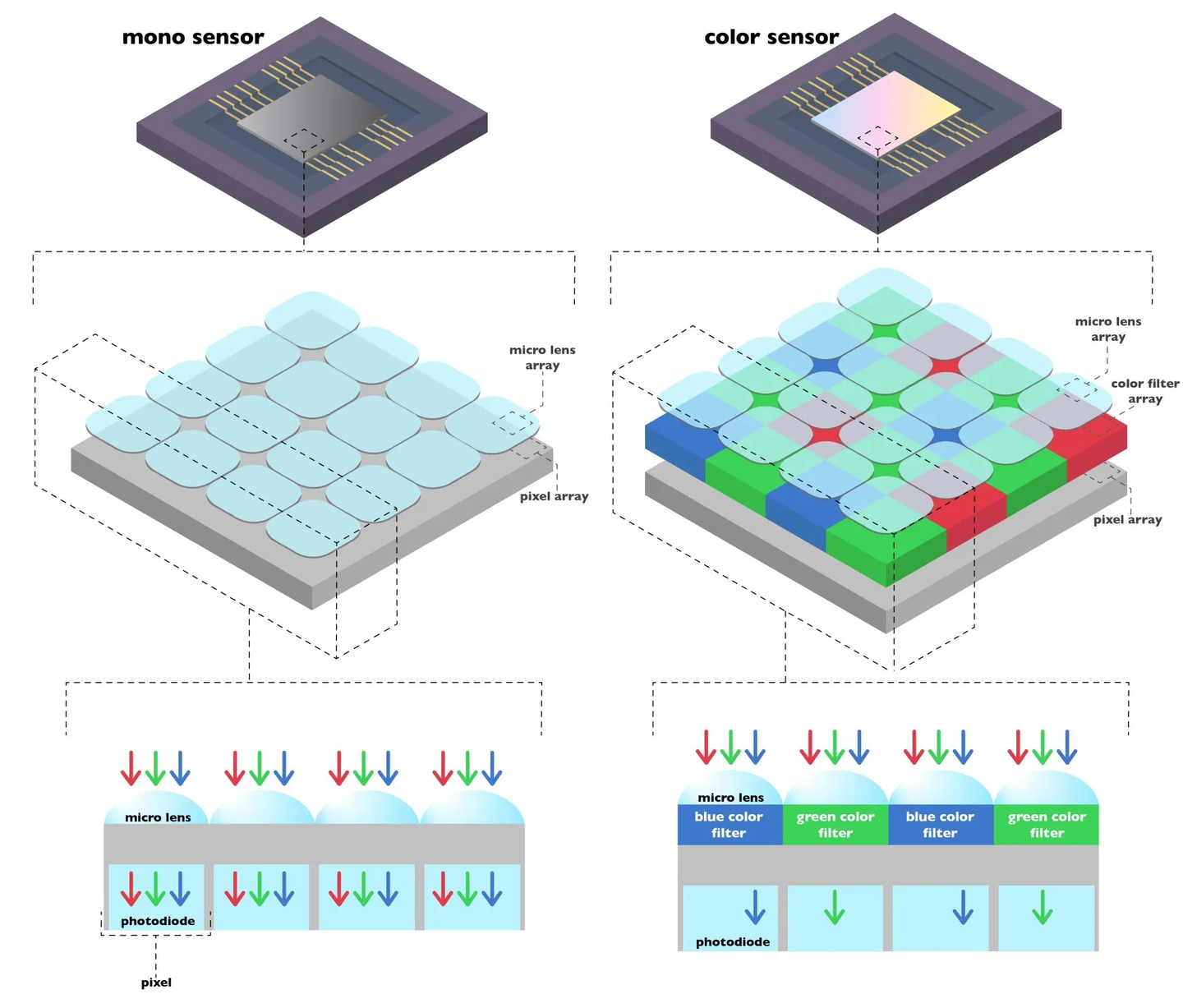
2. 单色(镀铬)和彩色传感器
单色传感器获取光强度信息,而不提供任何颜色信息。它会检测落在每个像素中的光并产生黑白图像。
彩色传感器使用彩色滤光片阵列 (CFA) 捕获颜色信息。彩色滤光片阵列是一个由红色、绿色和蓝色滤光片组成的网格,它们放置在传感器的像素上,如下图所示。根据放置在特定像素上的颜色滤光片,只有该颜色波长的光通过滤光片,并在该像素位置被传感器捕获。
之后,对颜色信息进行插值,使最终图像由每个像素位置的红色、绿色和蓝色 (RGB) 颜色信息组成。
如果我们有一张大小为 1920x1200 像素的图像,则图像的全部信息将保存在大小为 1920x1200x3 的数组中,因为每个像素都由红色、绿色和蓝色信息组成。
3. 单色和彩色传感器的光谱灵敏度比较
在下图中,我们可以看到标准单色和彩色传感器的光谱灵敏度。光谱灵敏度告诉我们传感器对不同波长的光敏感度。与彩色传感器相比,单色传感器对所有波长的光具有更高的灵敏度。
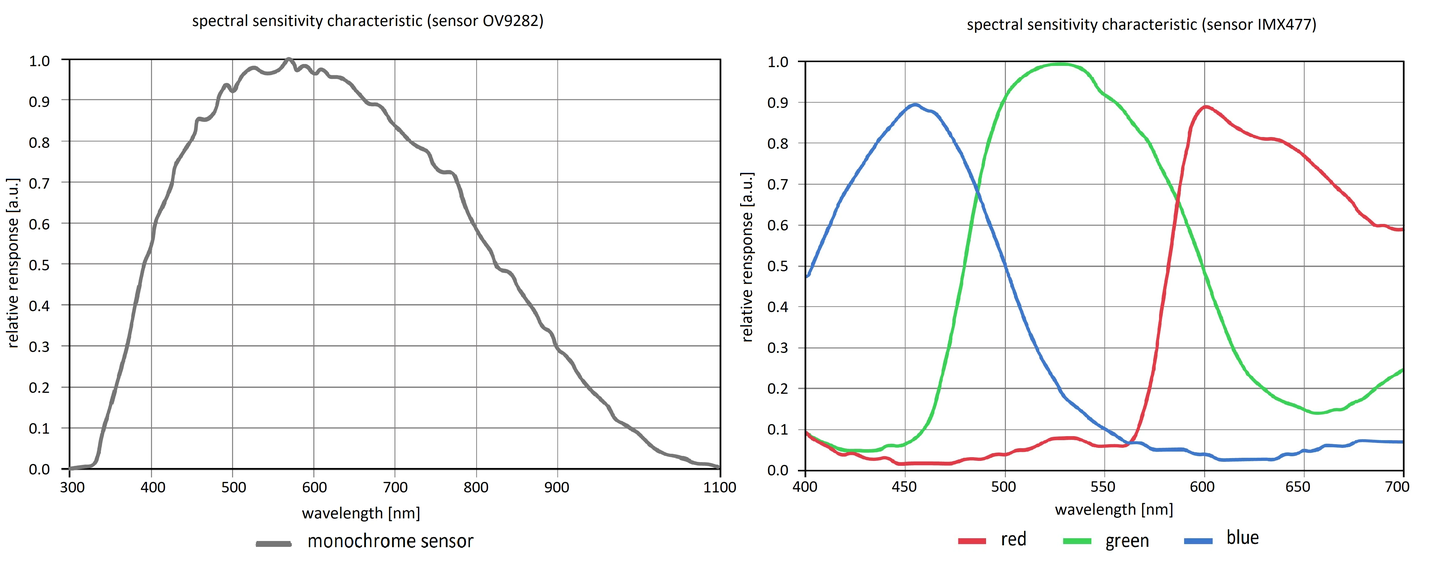
相对响应是指传感器在不同波长下的相对光谱灵敏度,归一化为传感器灵敏度最高的波长。
量子效率是衡量传感器将入射光子转化为电子的能力的指标。与彩色传感器相比,单色传感器的量子效率更高,因为彩色传感器中存在的彩色滤光片阵列减少了到达光电探测器的光量。
单色传感器可以达到80%左右的最大量子效率,而彩色传感器的最大量子效率可以达到40%左右。
4. 低光性能
与彩色传感器相比,单色传感器的低光性能通常更胜一筹。这是彩色滤光片阵列的结果,它过滤掉了颜色传感器中的一些入射光。因此,与单色传感器相比,到达彩色传感器的光线更少。在弱光条件下,这一点至关重要,这就是为什么在此类环境中首选单色传感器的原因。
在下图中,我们比较了一些传感器的低光性能(从左到右,从上到下:OV7251、OV9282、AR0234、IMX214、IMX378、IMX462、IMX582)。
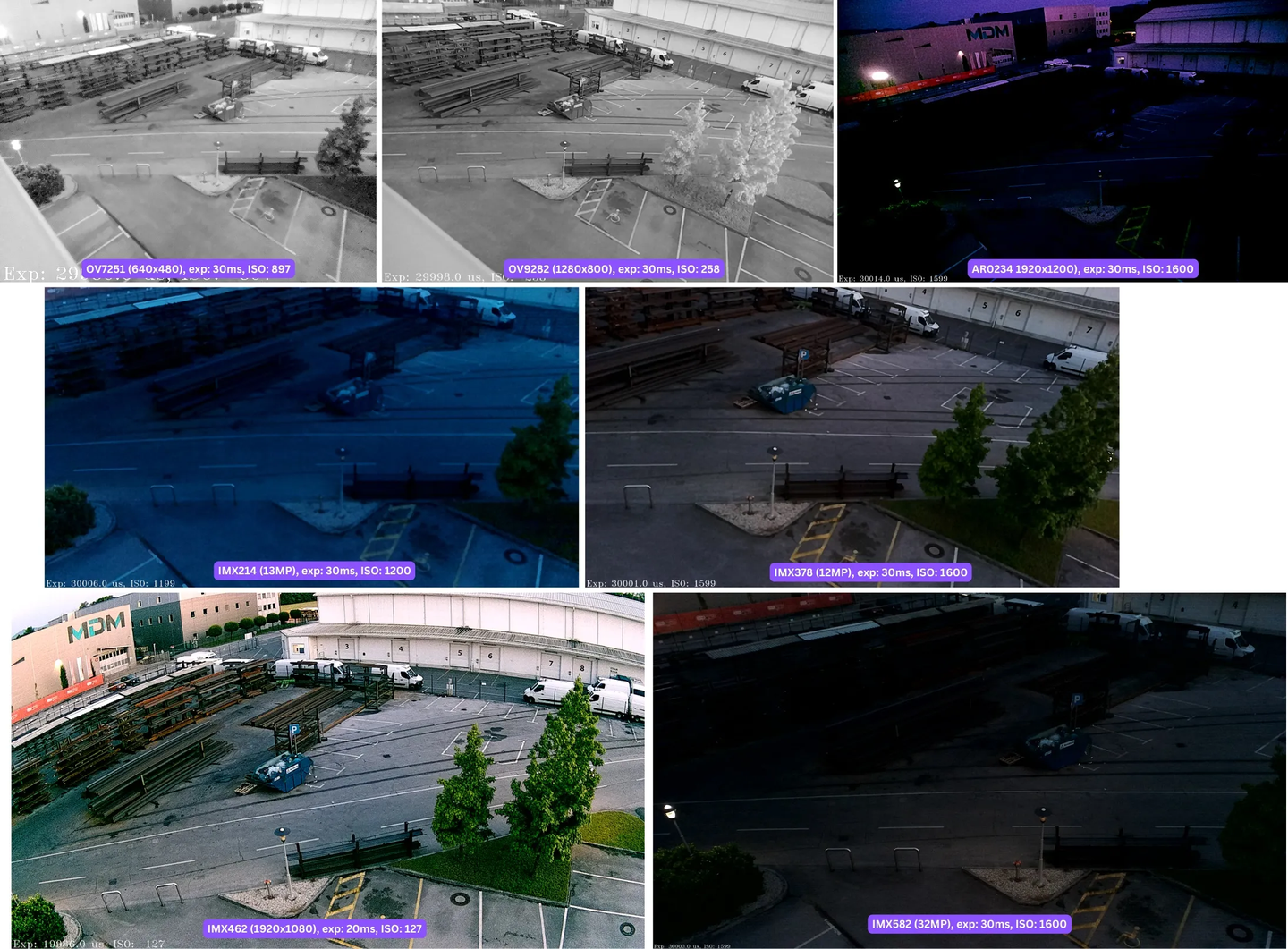
您可以在 此处查看 gdrive上的完整图像。