视频讲解
- 【第1季】8.第8章_激光SLAM系统-视频讲解
- 【第1季】8.1.第8章_激光SLAM系统_Gmapping算法-视频讲解
- 【第1季】8.2.第8章_激光SLAM系统_Cartographer算法-视频讲解
- 【第1季】8.3.第8章_激光SLAM系统_LOAM算法-视频讲解
第1季:第8章_激光SLAM系统
- 先 导 课
- 第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
- 第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
- 第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
- 答 疑 课
------(永 久 免 费 ● 系 列 课 程 ● 长 期 更 新)------
添加图片注释,不超过 140 字(可选)
本书内容安排

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
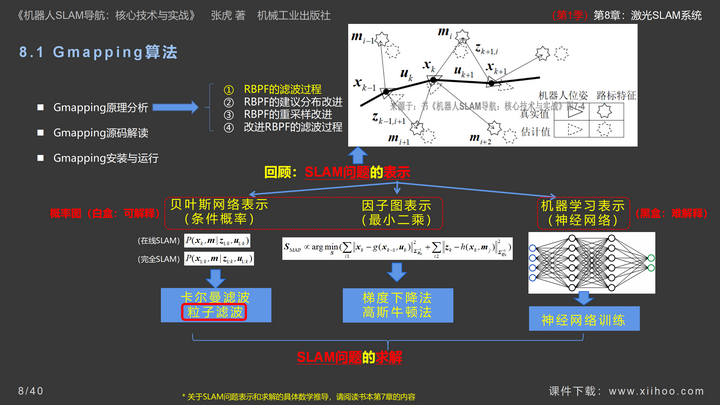
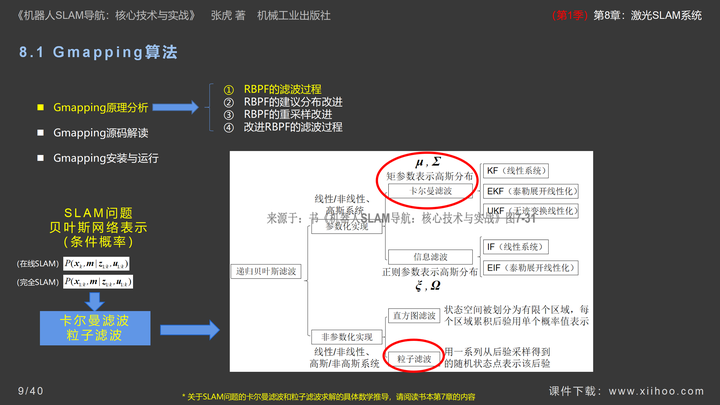
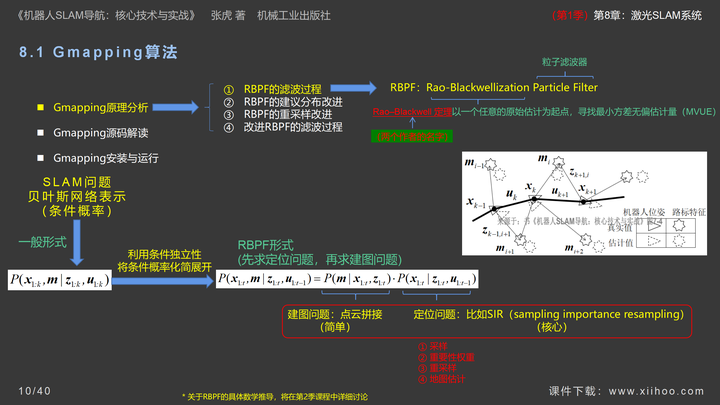
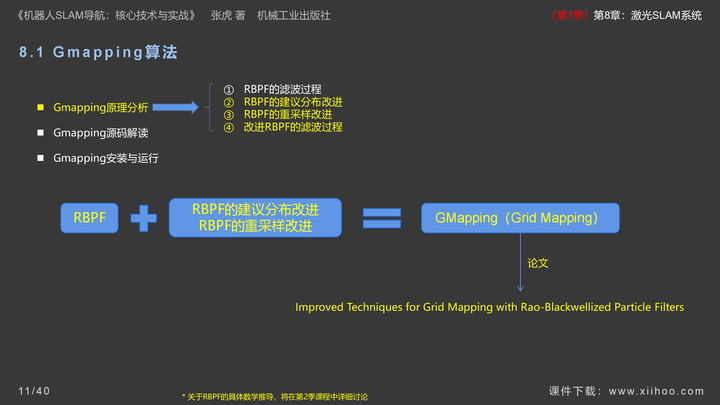
8.1 Gmapping算法
①Gmapping原理分析
RBPF的滤波过程、RBPF的建议分布改进、RBPF的重采样改进、改进RBPF的滤波过程
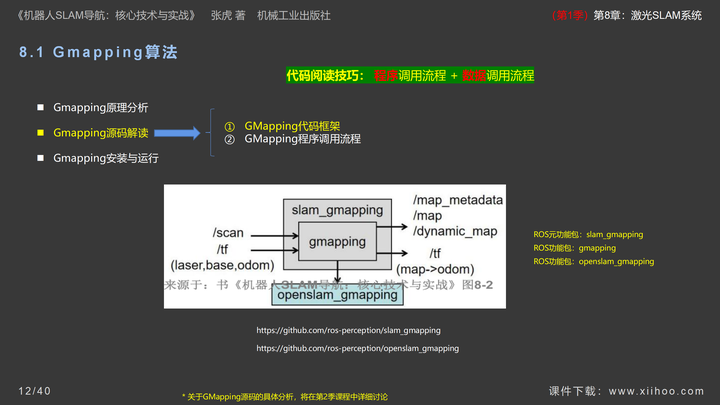
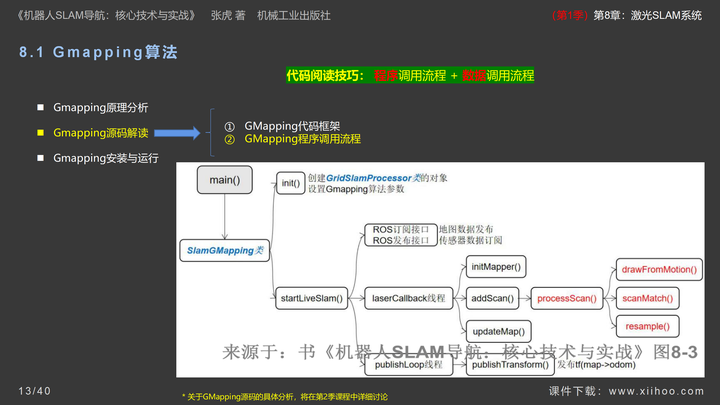
②Gmapping源码解读
GMapping代码框架、GMapping程序调用流程
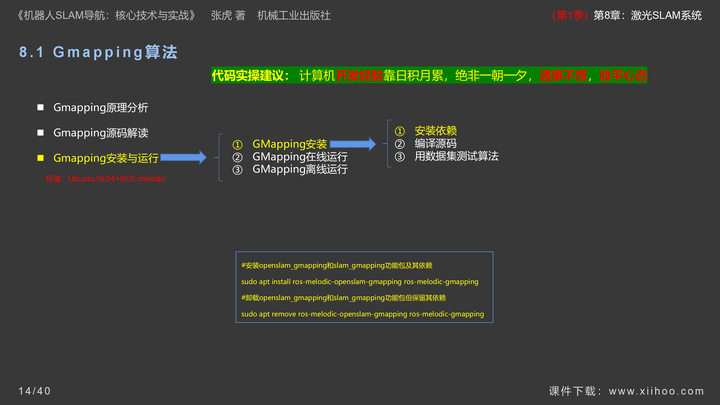
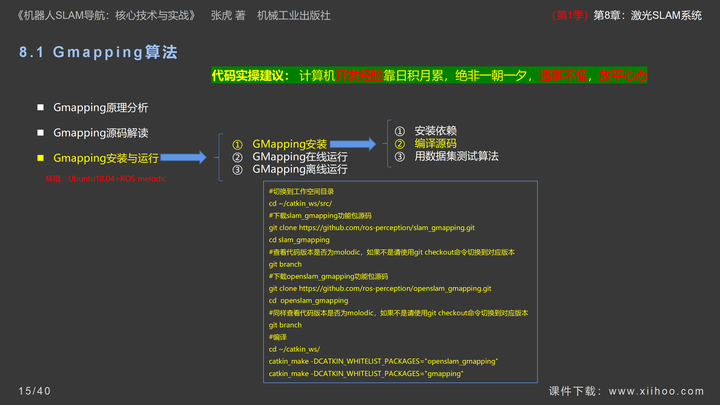
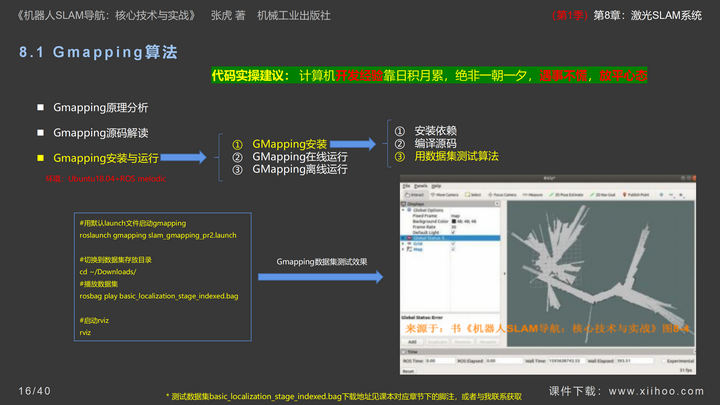
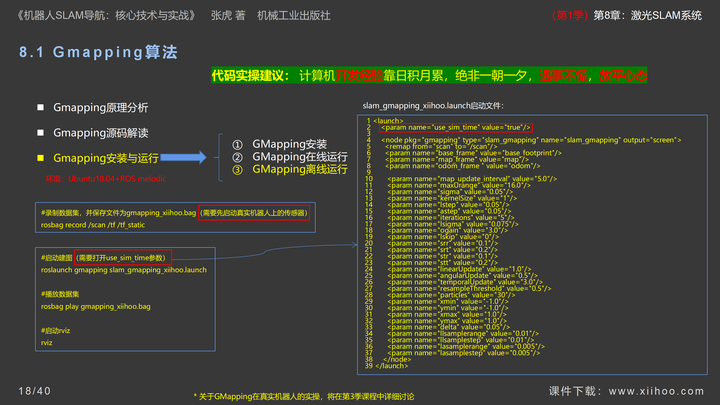
③Gmapping安装与运行
GMapping安装、GMapping在线运行、GMapping离线运行
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
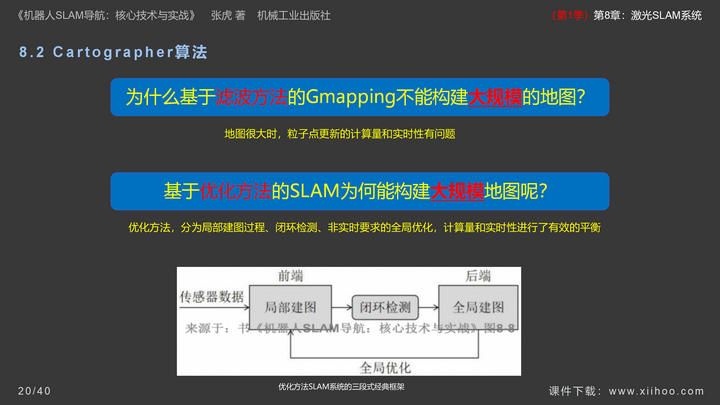
8.2 Cartographer算法
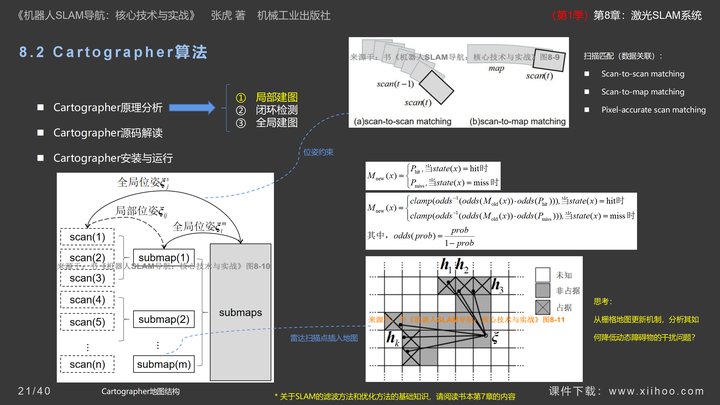
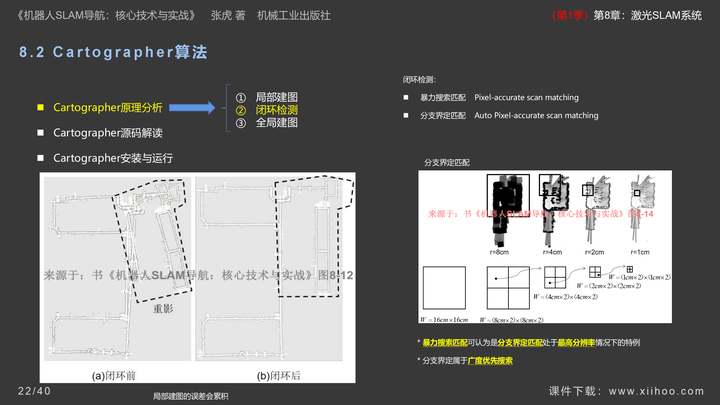
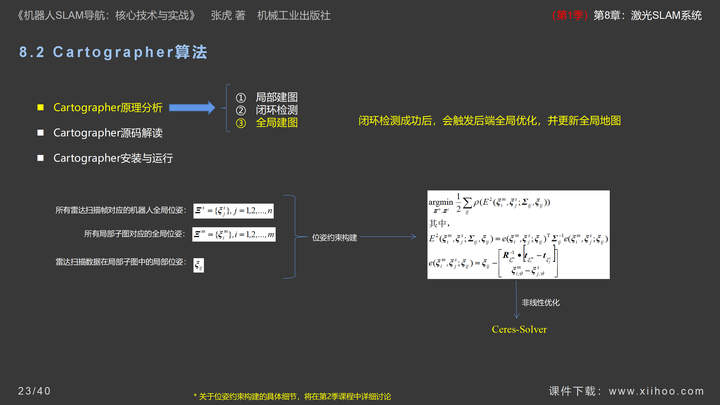
①Cartographer原理分析
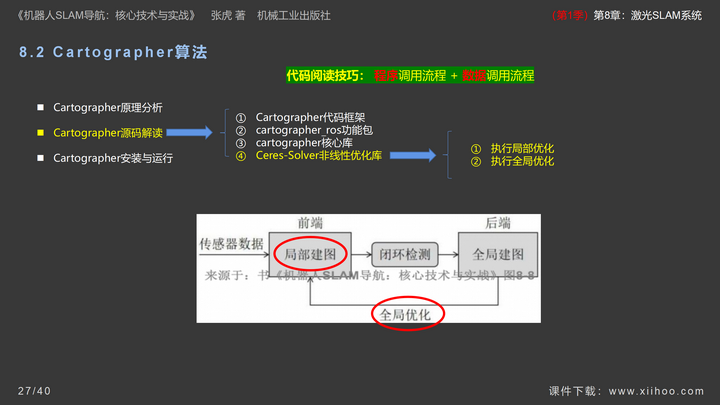
局部建图、闭环检测、全局建图
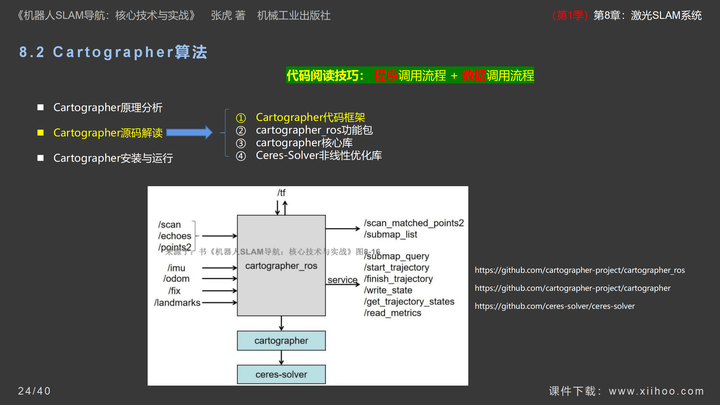
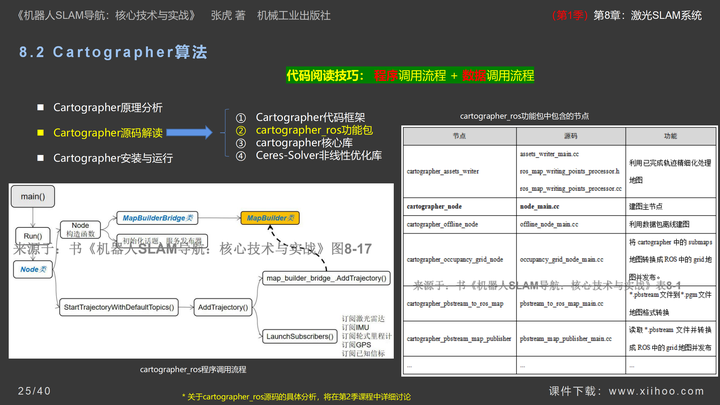
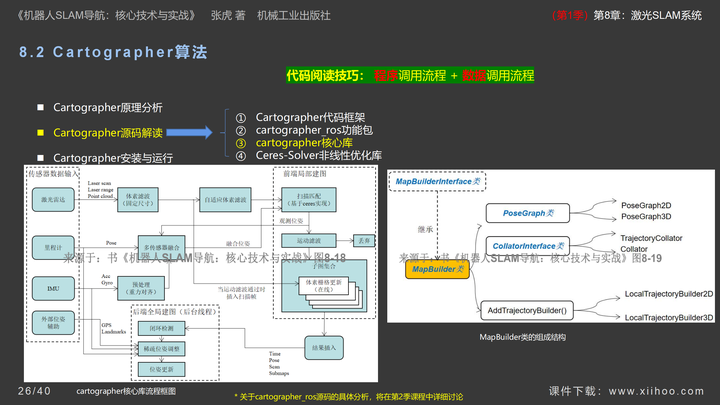
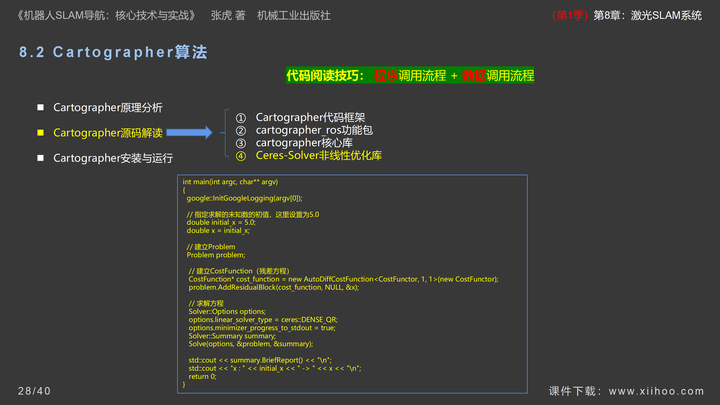
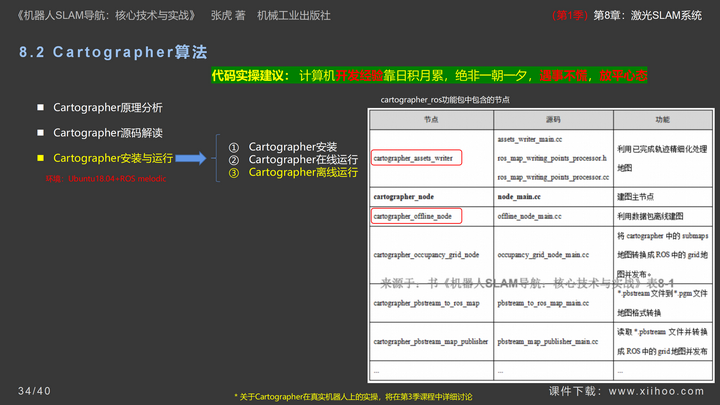
②Cartographer源码解读
Cartographer代码框架、cartographer_ros功能包、cartographer核心库、Ceres-Solver非线性优化库
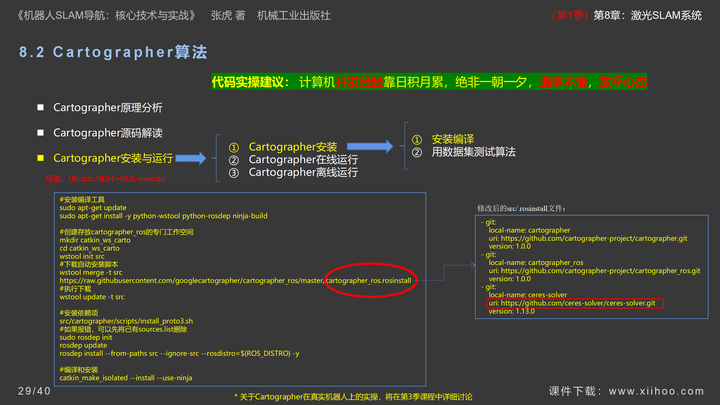
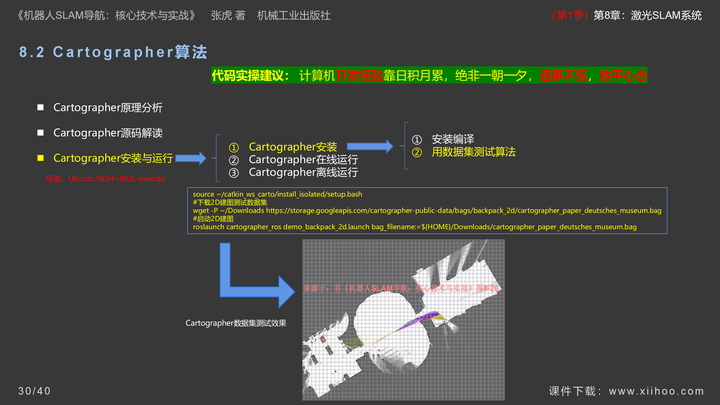
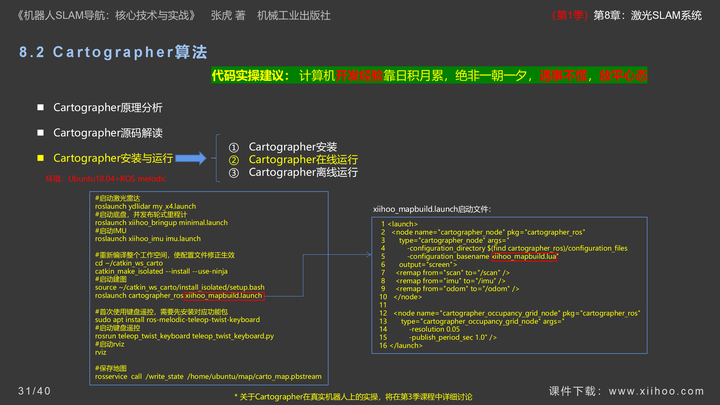
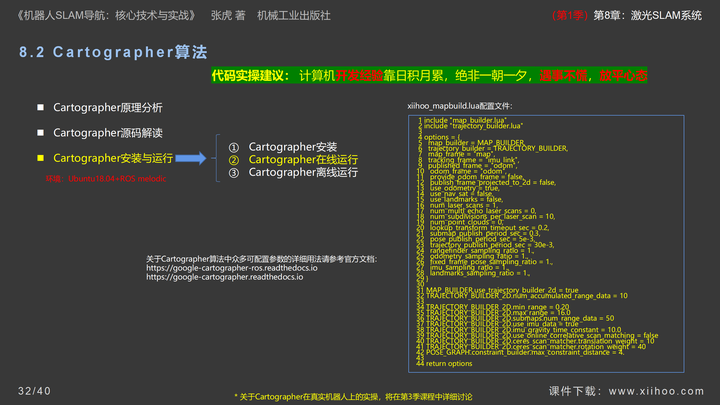
③Cartographer安装与运行
Cartographer安装、Cartographer在线运行、Cartographer离线运行
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
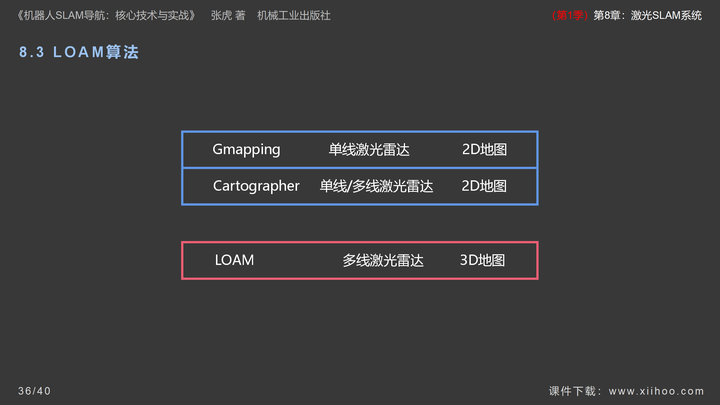
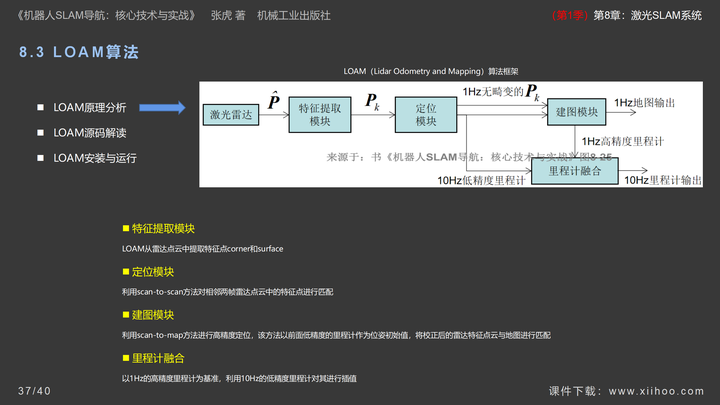
8.3 LOAM算法
①LOAM原理分析
②LOAM源码解读
③LOAM安装与运行
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
例程源码下载
-
Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
课件下载
PPT课件下载:
PDF课件下载: