2021年"京东618" 累计下单金额超3438亿元,再次刷新纪录! 从下单到收货,各种货品均可在短短几天内通过四通八达的物流网络送达全国任何一个家庭。电子商务和快递物流的迅猛发展对仓储、分拣、配送效率和准确性均提出了更高的要求,加速了智能物流的发展。
智能物流是工业4.0的重要组成部分。工业生产物流系统和商业配送物流系统、智能物流装备产业链等组成智能物流设备的三大要素,而智能物流装备的基础是自动化。在经济新常态和产业升级的背景下,人工、土地、仓储租金成本不断上涨,智能物流设备的兴起是大势所趋,整体市场规模将超千亿。
现阶段智能物流装备在烟草、汽车、工程机械、大型零售领域使用较多,预计未来在冷链、医药、电商、快递、纺织服装、食品饮料等行业仍会保持较快增长。自动化立体库 、输送分拣系统、物流机器人系统、自送引导搬运车(AGV)系统、自动识别与感知系统等先进的物流技术与装备正在快速成长,成为市场新的推动力。
,时长01:34
1
自动输送分拣设备
自动输送分拣设备是智能物流的核心装备之一,电子商务和快递企业需要高性能的输送分拣设备处理数量巨大的包裹。
2
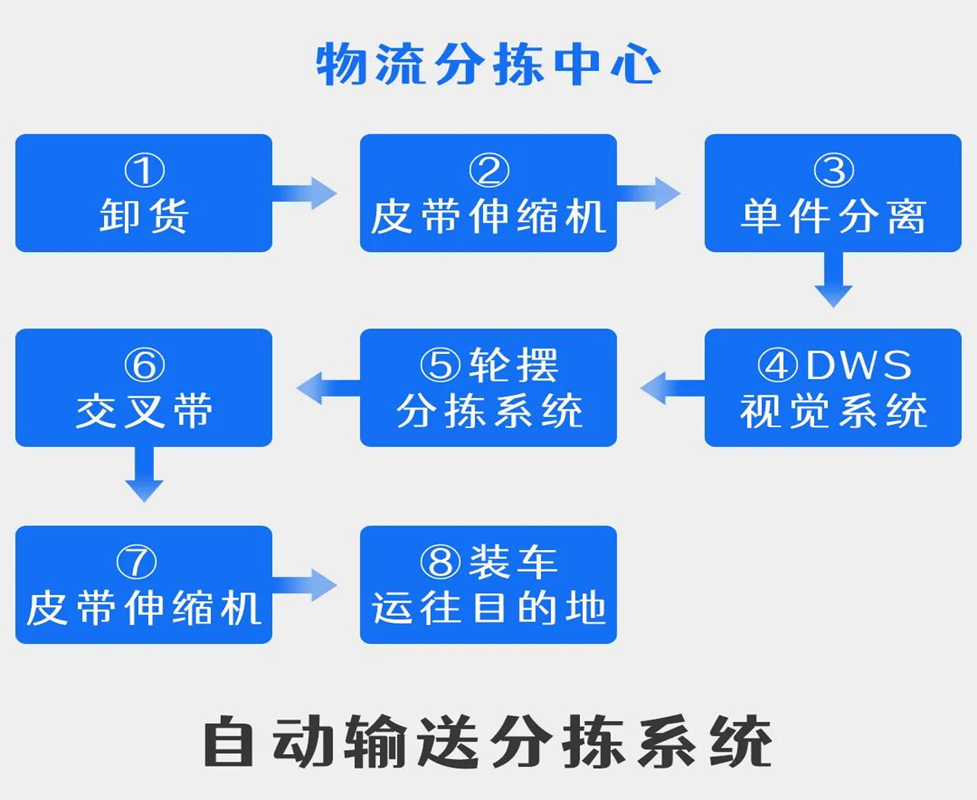
自动输送分拣工作流程
自动输送分拣设备需要兼顾快速分拣和高准确度,能持续、大批量分拣货物,基本实现无人化作业。
高效率的分拣作业显著缩短订发货周期。分拣设备每小时处理物品1.6万件,错误率极低。
3
皮带伸缩机
皮带伸缩机主要完成卸货与装车。

4
单件分离系统
单件分离系统,能够对包裹进行整位、分离、智能排队。从而将批量的包裹变成单件排列,形成非常整齐的"阵型"。

5
DWS视觉检测系统
包裹自动称重体积测量扫码设备(动态DWS系统)在输送过程中自动对包裹进行称重计量、体积测量、条码扫描等。
6
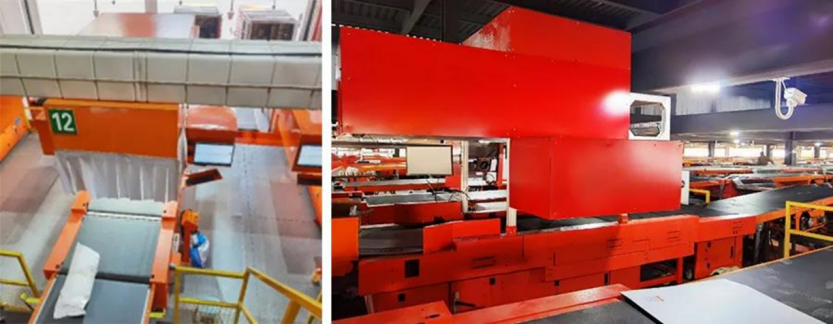
摆轮分拣系统
斜摆轮分拣设备可实现三向分拣。
7
交叉带
交叉带由主输送台和斜导轮分拣台组成。将需要分拣的商品按照品种、货主、储位或发送地点进行快速且准确的分类。

8
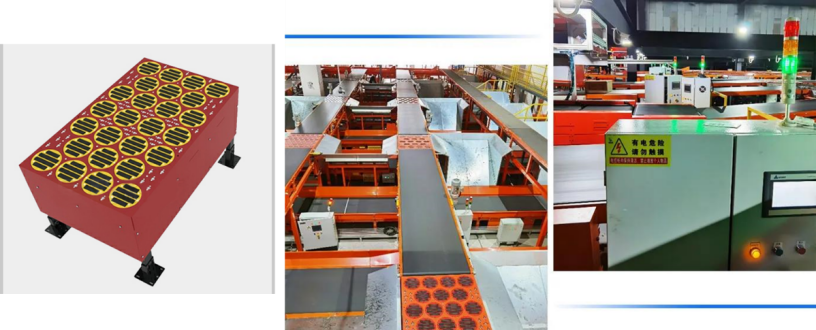
物流行业自动输送分拣中心解决方案

控制要点:
1、单件分离/摆轮分拣控制系统采用合信基于CODESYS开发的CTH300系列中型PLC进行控制,通过EtherCAT与伺服通信。
2、合信基于CODESYS开发的CTH300系列PLC与DWS上位机系统以及工业视觉相机等采用Socket进行通讯。
3、斜摆轮分拣系统由合信PLC搭配多个A3系列伺服完成控制,搭配TP07i触摸屏,实现全系统联网控制。
4、每条线可以通过EtherCAT扩展多个摆轮,仅需一个PLC实现全线多个摆轮系统控制;
5、每个摆轮均由2个伺服单独驱动,分拣高效合理;
9
控制系统优势
● 基于CODESYS开发的CTH300系列中大型PLC,程序空间数据空间大,扩展能力强,处理器扫描速度快;
● CODESYS集成主流工业总线协议栈,本方案采用高速EtherCAT总线控制伺服系统,接线简洁,控制精度高,速率快,响应实时;
● 通过CODESYS软件可以有效的查看跟踪对应的变量的变化曲线,方便调节;
● CODESYS集成复杂运动控制功能:支持电子凸轮,可以自定义凸轮曲线,内置丰富的配置选项,可以自由增减推杆数量和触发形式;支持CNC功能,符合DIN66025的G代码标准,使用多种机构的运动学变换的正逆解算法和路径预处理功能块;支持机器人编程,包含丰富的运动学变换库以支持不同运动学的工业机器人的开发,例如Delta机器人,SCARA机器人以及龙门式机器人等;支持支持虚轴,可以采用虚轴带实轴的形式做项目测试。在旋盖机上使用电子凸轮让工艺过程更好控制。
10
CODESYS运动控制优势
CODESYS将运动控制与逻辑控制合二为一,集成在IEC 61131-3标准的CODESYS 编程系统和CODESYS Runtime 运行时系统中,形成了CODESYS SoftMotion(CNC) 工具包。从单轴运动到复杂CNC控制和机器人应用,都可以使用CODESYS **SoftMotion(CNC)**来编程实现。
与传统的运动控制解决方案相反,CODESYS SoftMotion(CNC) 提供了一个直接集成在CODESYS 编程环境中的工具包,用以实现运动控制的所有功能。CODESYS **SoftMotion(CNC)**工具包基于国际标准的IEC 61131-3编程语言,用户可以使用它开发最复杂的运动控制应用程序。
CODESYS SoftMotion 特点:
(1)运动控制编程独立于总线和驱动器。
(2)可用于众多标准运动控制器的驱动器,例如CIA DSP 402控制器、步进电机、变频器、虚拟轴等。
(3)可直接在CODESYS编程环境中配置总线和驱动。
(4)提供包含所有运动控制功能块的POU库,可以快速、高效地开发简单运动程序。
(5)支持在集成的编辑器中设计电子凸轮。
(6)支持集成的DIN 66025编辑器(支持G代码)来规划和编辑复杂的动作。
(7)通过使用PLCopen Motion Part 4 和轴组编辑器来开发多轴机器人控制器。
(8)丰富的库函数集,包括几何数据处理(路径预处理),样条曲线计算,CNC刀具位置校正等。
(9)包含丰富的交换库(用于备份和交换数据用),用以支持不同运动学的工业机器人的开发,例如Delta机器人,Scara机器人,Portal机器人以及龙门式机器人等。
(10)支持在线的CAM编辑器和CNC编辑器,机器操作员可以图形化的方式创建和编辑CNC程序。
信迈提供ARM+Codesys国产化定制。