- 本文使用一个植物的数据集,进行标注从而能用于深度学习点云目标检测和分割任务
- 论文出处 Soybean-MVS: Annotated Three-Dimensional Model Dataset of Whole Growth Period Soybeans for 3D Plant Organ Segmentation
- 其中主要解决问题
- 如何使用网格mesh和点云进行标注
- 如何对于复杂物体进行分割
- 如何设置标签进行导出
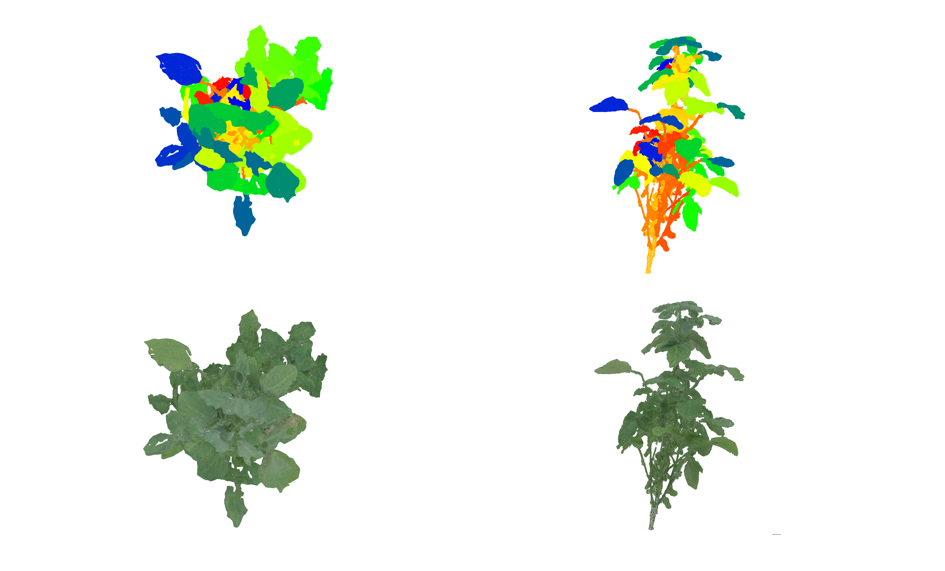
- 下面是最后的结果图,上面为标注后数据,下面为原始数据。
软件下载
下载地址: https://www.cloudcompare.org/
打开文件
CloudCompare支持多种常见的3D数据格式导入,以下是其主要支持的文件格式:
- 点云文件格式 :
.las/.laz(LASer文件格式).e57(ASTM E57文件格式).ply(Polygon File Format).xyz(简单XYZ文本格式).pts(ASCII格式).asc(ASCII格式).bin(CloudCompare二进制格式).pcd(Point Cloud Data文件格式).txt(ASCII文本格式)
- 网格模型文件格式 :
.obj(Wavefront Object文件格式).stl(STereoLithography文件格式).ply(Polygon File Format,支持网格).fbx(Autodesk FBX文件格式).3ds(Autodesk 3DS文件格式).dae(Collada文件格式)
- 地形数据格式 :
.dem(Digital Elevation Model).dtm(Digital Terrain Model)
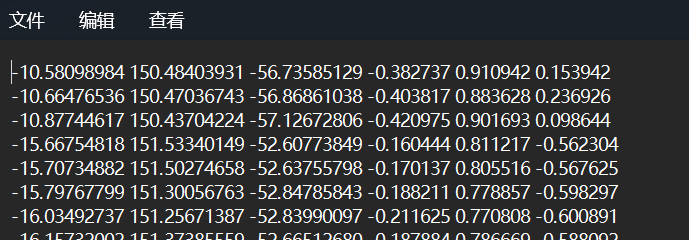
导入文件
我这里面.txt格式数据进行导入,前三列为xyz点云坐标,后三个为点云点的RGB颜色信息
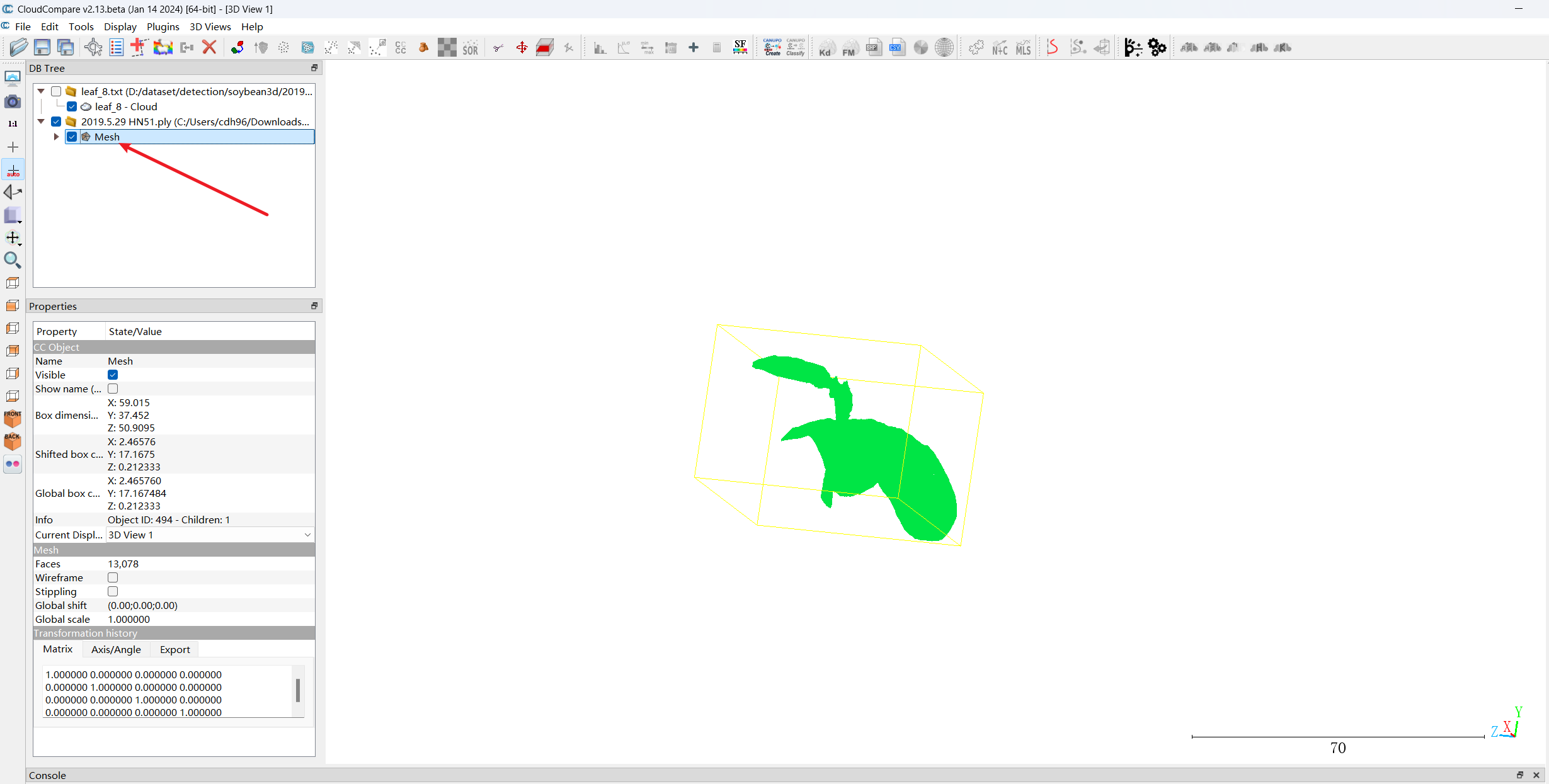
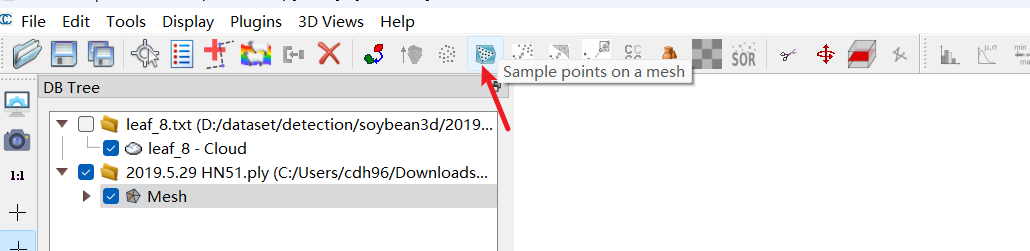
网格Mesh数据转成点云数据
-
一般得到的三维数据可能直接是点云,也可能是得到是网格mesh数据。如果是mesh类型数据,我们先将mesh转化成点云数据
-
选择网格转化成点云操作
-
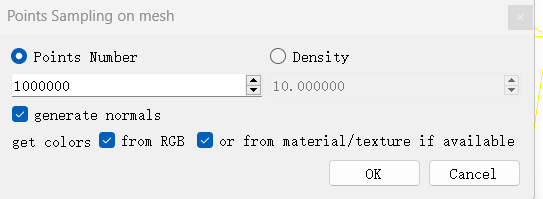
选择将网格采样到点云的点云数量
-
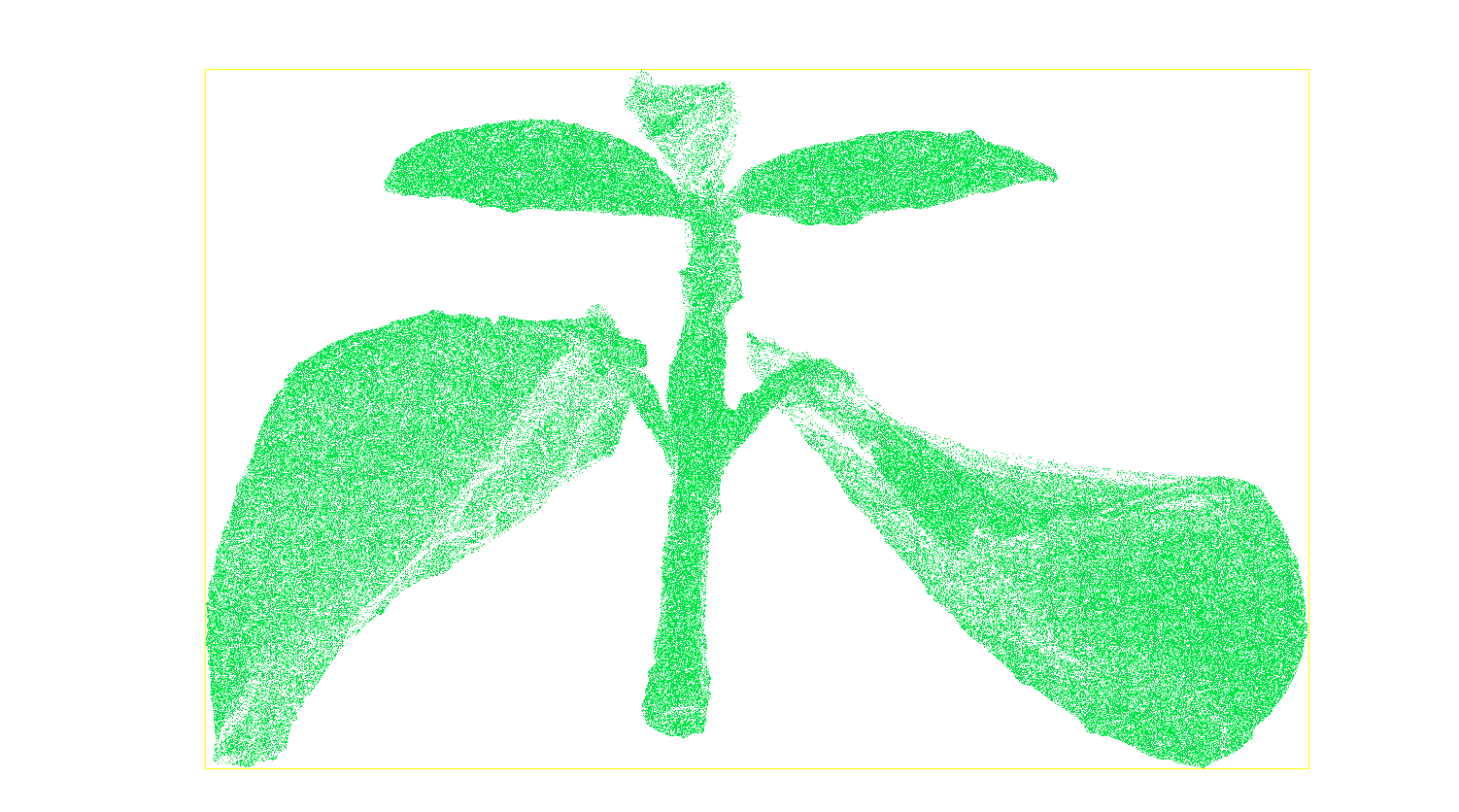
最后的结果展示了采样后得到的点云
利用鼠标查看视图
- 缩放视图:滚动鼠标滚轮来放大或缩小视图。
- 平移视图:按住鼠标右键和建,移动鼠标来平移视图。
- 选择对象:点击鼠标左键可以选择视图中的点云或网格对象。
- 多选选择对象:按住Ctrl键,然后点击鼠标左键可以选择或取消选择多个对象。
标注
- 这里我们的目标是,对分割的物体形成一个txt格式的文件并且名字中带有类别和实例个数。例如
leaf_1.txt
分割
这里一定要确保是我们要分割的样本,先选中我们要分割的样本,一定要点击上
点击工具栏上的分割工具

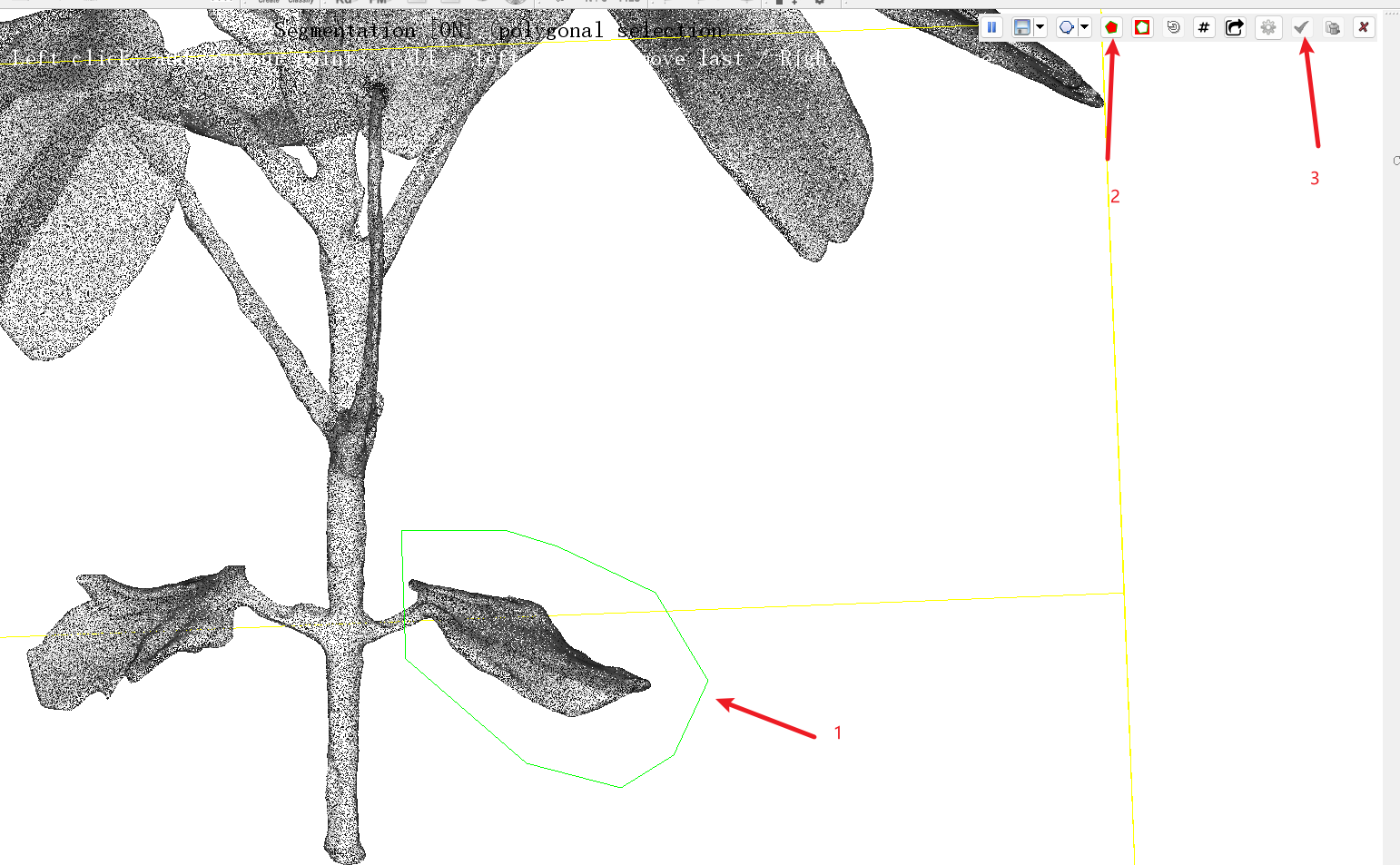
通过以下步骤进行分割
- 通过不断点击裁剪的物体的范围,形成闭环的多边体
- 点击2号位置的按钮,对选中区域进行提取,这样3号按钮就能点击了
- 最后点击对号按钮就分割出我们分割的物体
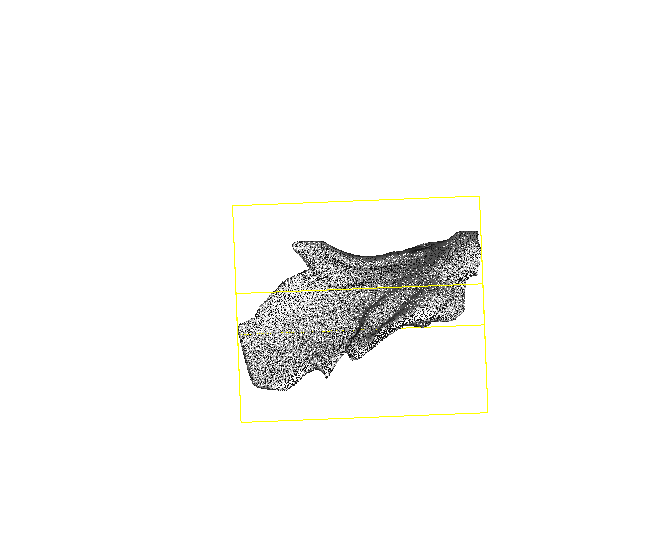
注意对于复杂物体可以通过多次转换视角,分次裁剪得到,如果有需要我后期单独会介绍这块
- 最后分割结果如下图
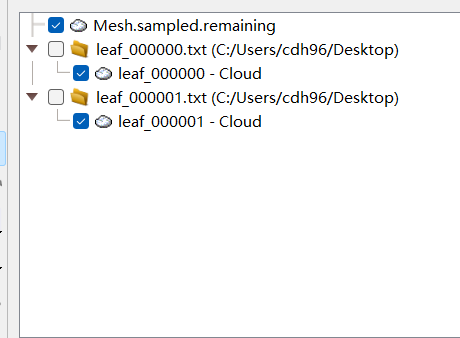
保存文件
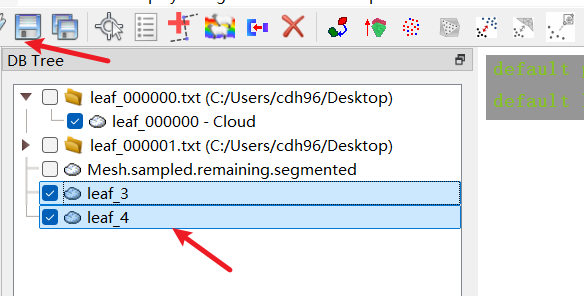
这里面选中我们同一类别的分割物体,点击保存案件
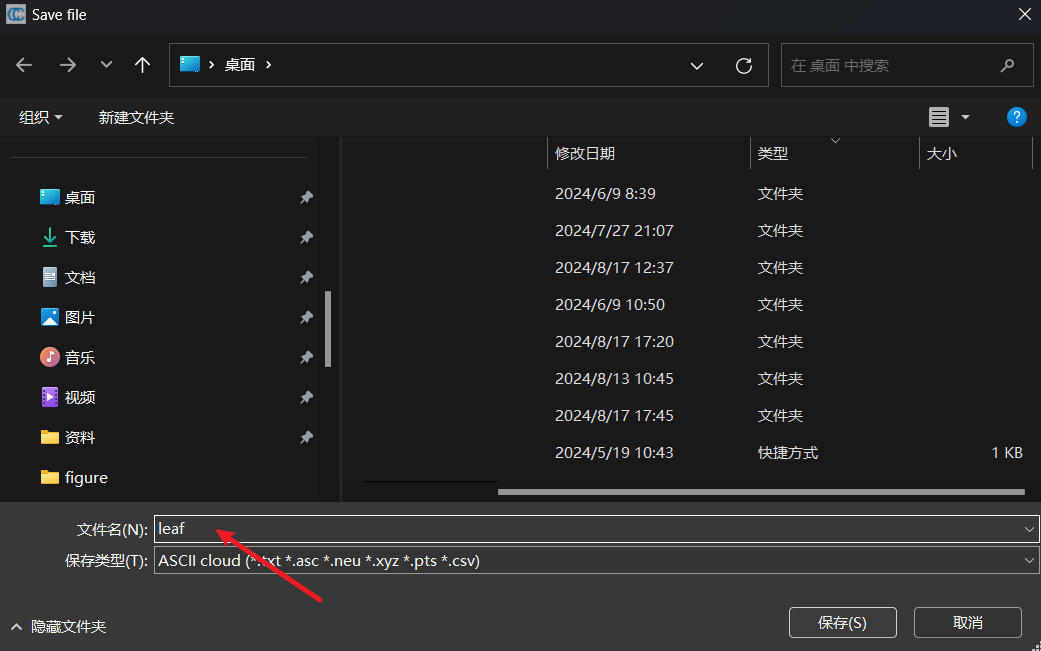
保存的时候输入我们保存的类别名
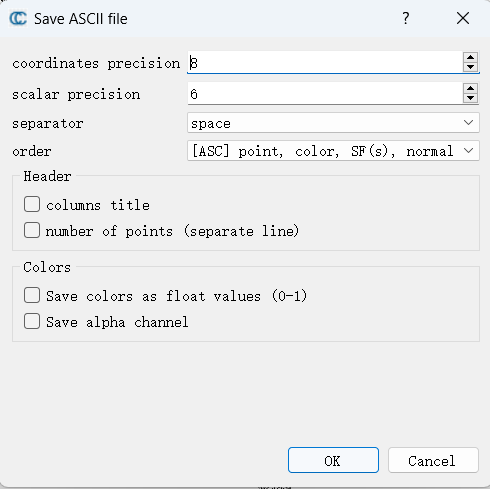
最后是我们分割出来的物体,包括类别和实例个数,方便后续我们进行不同任务,再进行相应的处理
总结
我这里总体介绍能满足语义和实例分割任务的数据集标注方式,但其中没有想其他介绍的对点云加标签,我这里是主要减少标注过程中操作,利用文件名约束,最后通过程序来转化成具体用什么框架和什么任务的数据集。