
特刊征稿
01
特刊名称:
Civil and Public Domain Applications
of Unmanned Aviation
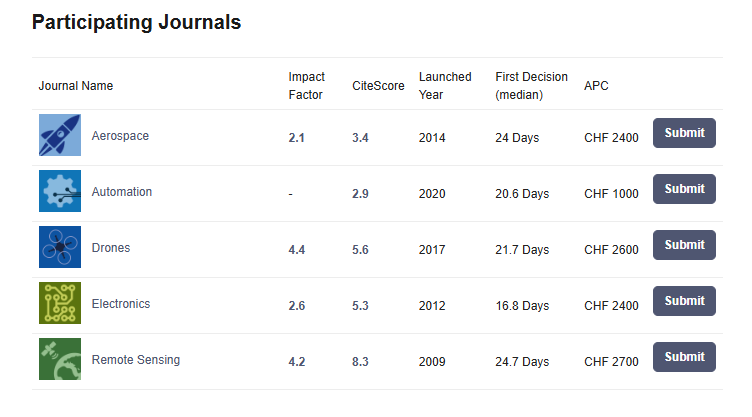
参与期刊:
截止时间:
摘要提交截止日期
2024年10月31日
投稿截止日期
2024年12月31日
目标及范围:
在过去十年中,无人系统经历了前所未有的增长水平。尽管军事应用多年来一直在该领域占据主导地位,但向民用和公共领域应用发生了重大转变,其中高空作业平台被用于城市和农村地区的广泛不同应用。本专题重点关注民用和公有领域的应用,以及无人驾驶航空的社会影响及其对日常生活质量的影响。尽管技术挑战涵盖了广泛的主题,但特别重要的是以下主题:
· 仿生高空作业平台;
· 混合平台;
· 设计弹性;
· 人为因素;
· 融入国家空域的框架和规则。
提交的论文将包括但不限于 ICUAS 2024 中已接受会议论文的扩展版本,该会议将于 6 月 4 日至 7 日在希腊克里特岛哈尼亚举行。重叠的最大百分比为 30%。作者必须引用相应的会议论文。ICUAS 2024 中被接受的会议论文的扩展版本将享受文章处理费 20% 的折扣。
02
特刊名称:
Unmanned Vehicles Technology
and Embodied Intelligence Systems
for Intelligent Transportation
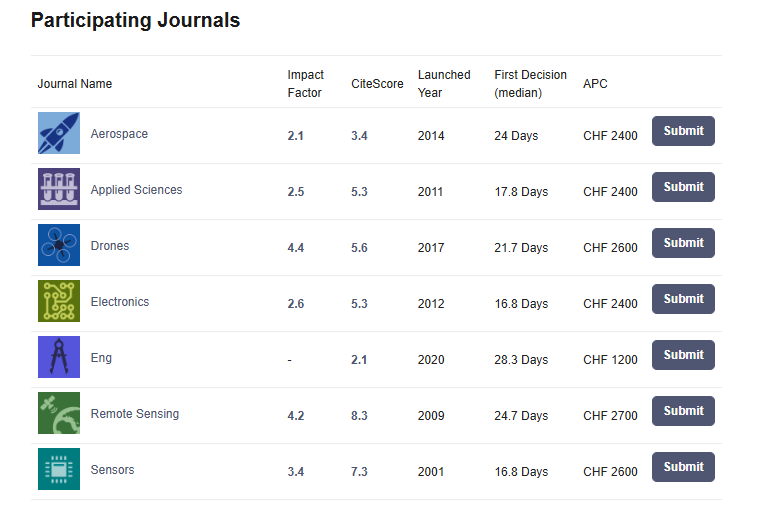
参与期刊:
截止时间:
摘要提交截止日期
2024年8月31日
投稿截止日期
2024年12月31日
目标及范围:
目前,用于智能交通的新型无人车技术和具身智能系统正处于变革时期。在可预见的近期,以UGV(无人地面车辆)和UAV(无人机)为代表的无人系统将构建新的地面和空中运输、物流和运营系统,在工农业各个领域将具有巨大的应用潜力。无人驾驶系统(在开放道路和封闭道路上)和智能农业机械设备是具有代表性的智能交通应用。"互动"感知、"可学习"的认知和决策以及"自我成长"的行为控制是具身智能的三个重要特征。相应地,多传感器(激光雷达、毫米波雷达、光学传感器)和多源信息融合技术、SLAM技术、仿生视觉技术等应用于感知阶段。将类脑智能和端到端深度学习神经网络应用于认知和决策阶段。在行为控制阶段应用扰动自抑制控制、积分控制、仿生编队控制、有人/无人混合协同控制技术。
征集范围包括但不限于以下内容:
· 自动驾驶、智能驾驶、无人驾驶;具身智能;
· 知觉、认知和行为;
· SLAM(同步定位和映射);
· 激光雷达、毫米波雷达、RGB和RGB-D机器视觉感知、多光谱光学感知;"互动"感知;
· "可学习"的认知和决策;
· "自我成长"行为控制;生物启发的视觉感知;
· 多传感器、多源信息融合;
· 脑模仿智能和端到端深度学习神经网络;
· 扰动观测器和主动扰动抑制控制;
· 感知、决策、控制一体化技术;
· 生物启发的地层控制;
· 有人/无人系统的混合协同控制。
03
特刊名称:
Innovation and Inventions in Aerospace
and UAV Applications
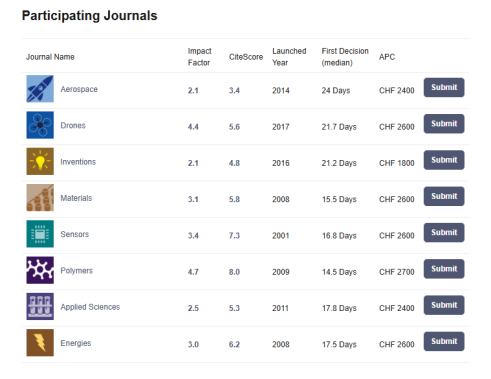
参与期刊:
截止时间:
摘要提交截止日期
2025年6月30日
投稿截止日期
2025年8月31日
目标及范围:
作为"航空航天和无人机应用中的创新与发明"主题的编辑,我们邀请您向本论文集投稿一篇。最近,我们在无人机 (UAV) 和航空航天问题的发展方面经历了巨大的增长。每个月都会带来与航空相关的最广泛意义上的新想法,成为该领域研究的更强大的加速器。本专题旨在为有人驾驶和无人驾驶航空在许多领域的创新发展做出贡献。将特别考虑涉及设计、建模和控制方面的重大和创造性进展以及新颖方法和应用的高质量论文。
可能的主题包括但不限于以下内容:
· 创新的无人机设计;
· 航空航天和无人机领域的新设计方法;
· 非常规机身配置;
· 无人机系统的新应用;
· 航空增材制造;
· 航空新材料;
· 晶格和轻质结构;
· 混合动力推进系统;
· 飞行平台效率;
· 航空业的绿色推进;
· 有人驾驶和无人驾驶航空器之间的合作;
· 航空导航;
· 用于无人机系统/航空自主控制的新机器学习技术;
· 飞行平台的动力学、控制和模拟;
· 无人机嵌入式系统设计;
· 用于无线通信的新型安全系统。
04
特刊名称:
Target Tracking, Guidance, and
Navigation for Autonomous Systems,
2nd Edition
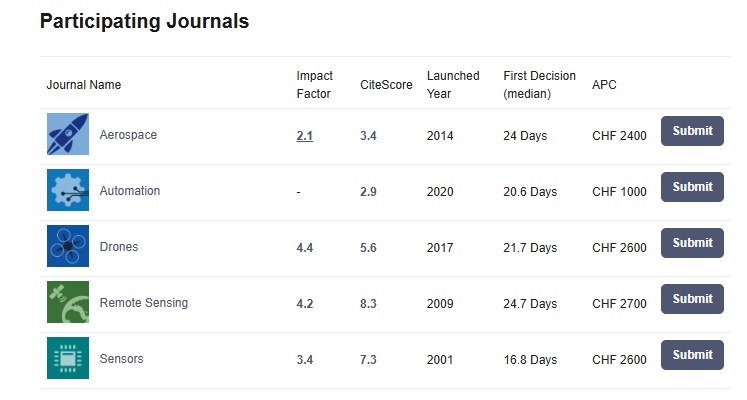
参与期刊:
截止时间:
摘要提交截止日期
2025年5月20日
投稿截止日期
2025年8月20日
目标及范围:
民用和军用对自主系统(包括无人驾驶车辆)的需求不断增长,推动了现代目标跟踪、制导和导航技术的发展。目标信息对于自主系统与周围环境进行交互至关重要,使它们能够完成任务。然而,系统本身的运动影响着目标信息的质量,这意味着目标跟踪问题与自主系统的制导和导航是分不开的。模型/数据驱动估计、异构数据融合、优化和人工智能等现代技术可以改进目标跟踪系统,进而改变制导和导航的整体性能。本期特刊旨在梳理目标跟踪、制导和导航方面的最新理论和技术进展,这些进展为自主系统提供了高度的自主性。相关主题包括但不限于:
· 在杂乱/堵塞的环境中跟踪机动目标;
· 使用异构传感器进行联合目标跟踪和分类;
· 集中式/分布式多传感器融合;
· 优化的传感器布置;
· 自动驾驶汽车的制导、导航和控制;
· 综合目标跟踪和引导;
· 基于动态模型的导航;
· 群体定位;
· 使用SLAM进行动态目标跟踪(同步定位和映射);
· 将人工智能应用于目标跟踪、制导和导航。
05
特刊名称:
Advanced Technologies and Applications
for Unmanned Systems
参与期刊:
截止时间:
摘要提交截止日期
2026年3月31日
投稿截止日期
2026年7月31日
目标及范围:
目前,无人驾驶车辆(如机器人、自动驾驶汽车、无人水面车辆、无人机、无人机等)和智能系统是交通领域中一些最令人兴奋和创新的技术。无人驾驶车辆和系统可以通过各种通信系统(如飞机寻址和报告系统、车载自组网、长期演进、4G/5G移动网络等)与他人共享其检测到的信息(如物理环境、碰撞事件、威胁信息等),以进行合作和协调。无人驾驶车辆和系统在国民经济和人类社会生活中发挥着越来越重要的作用,在交通监控、救灾、反恐行动、目标获取等诸多领域发挥着越来越重要的作用。与有人驾驶车辆相比,无人驾驶车辆可以将人类从枯燥、肮脏和危险的任务中解放出来,并高效运行设施。随着各种计算模型和控制策略的进步,越来越多的研究者和实践者积极开始关注无人系统的关键技术和智能化应用。此外,随着人工智能、机器学习、数据挖掘、信号处理等技术的融合,无人驾驶汽车的许多智能应用正在快速增长并得到广泛应用。无人驾驶车辆和无人系统的进步影响着生活、商业、工业和教育的方方面面,并成为许多公司和组织受益的重要驱动力。以下主题旨在汇集世界一流的研究人员,展示最先进的研究成果和进展,这些成果和进展在自动驾驶汽车、无人水面车辆、无人机等的先进技术和智能应用方面为无人系统做出了贡献。评论文章也受到鼓励。
本主题可能包含的主题包括但不限于:
· 基于知识的人工智能,用于车辆感知、控制和决策;
· 自动驾驶汽车的人工智能应用;
· 自动驾驶汽车系统中的数据科学;
· 自动驾驶汽车的定位、映射和语义分割;
· 协同感知与控制车辆群;
· 高安全性、高可靠性的通信网络;
· 自动驾驶汽车系统的仿真和验证;
· 多智能体系统的任务分配和资源调度;
· 自动驾驶汽车的故障检测和诊断;
· 自主机器人/车辆的人机交互;
· 自动驾驶汽车的运动驱动和远程操作控制。
06
特刊名称:
Information Sensing Technology for Intelligent/Driverless Vehicle, 2nd Volume
推荐期刊:
截止时间:
摘要提交截止日期
2025年3月31日
投稿截止日期
2025年5月31日
目标及范围:
本专题是上一届成功主题"面向智能/无人驾驶汽车的信息传感技术"的延续。
环境感知系统作为车辆定位和路径规划的基础,是智能/无人驾驶车辆的重要组成部分,用于获取车辆周围的环境信息,包括道路、障碍物、交通标志和驾驶员的生命体征。在过去几年中,基于各种车载传感器(摄像头、激光器、毫米波雷达和GPS/IMU)的环境感知技术取得了快速进展。随着对自动驾驶和辅助驾驶的深入研究,无人驾驶汽车的信息传感技术已成为研究热点,因此应提高车载传感器的性能,以适应日常生活的复杂驾驶环境。然而,在现实中,仍然存在许多发展问题,如技术不成熟、缺乏先进的仪器、实验环境不真实等。所有这些问题都对传统的车载传感器系统和信息感知技术提出了巨大挑战,促使人们需要新的环境感知系统、信号处理方法,甚至新型传感器。
本专题致力于重点介绍安装在智能/无人驾驶车辆上的传感器在技术、方法和应用方面的最先进研究。欢迎撰写涉及基础理论分析的论文,以及展示其在现实世界和/或新问题中的应用的论文。我们欢迎与安装在智能/无人驾驶车辆上的传感器相关的所有领域的原创论文和一些评论文章,包括但不限于以下建议主题:
· 车载毫米波雷达技术;
· 车载LiDAR技术;
· 车辆视觉传感器;
· 基于GPS/IMU的高精度定位技术;
· 多传感器数据融合(MSDF);
· 安装在智能/无人驾驶车辆上的新型传感器系统。
投稿 小贴士
如果您对以上特刊感兴趣想要投稿,
或者需要推荐适合投稿的期刊及预审稿服务,
欢迎联系我们!