人形机器人的动作捕捉技术是实现机器人拟人化动作的关键技术之一,以下为您详细介绍几款动作捕捉系统:
• 原理:通过在人体关键部位(如关节)贴上反光标记点,利用多个高速摄像机从不同角度对标记点进行拍摄。摄像机捕捉到标记点的位置变化信息后,系统根据这些信息计算出人体的运动姿态和动作数据。
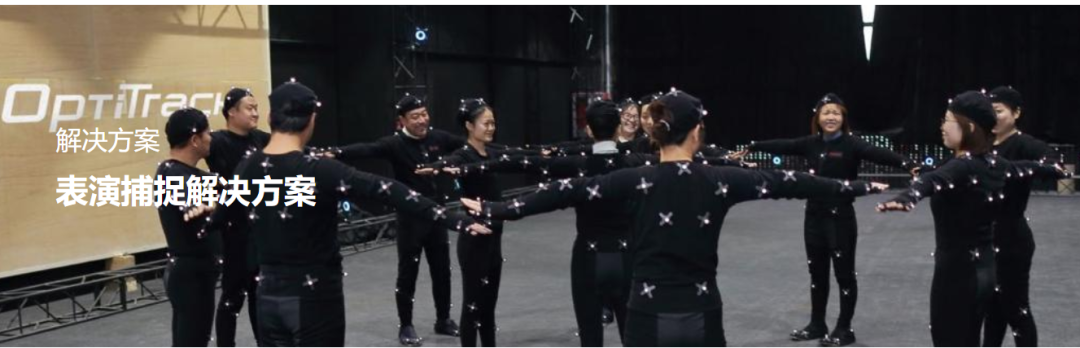
图为optitrack动作捕捉系统
• 优点:测量精度高,能准确获取人体细微的动作变化;数据采集频率高,可实时捕捉快速动作;不受电磁干扰,适用于多种环境。
• 缺点:对环境光线有一定要求,光线过暗或有强光干扰会影响数据准确性;标记点可能会被遮挡,导致部分数据丢失;系统成本较高,且需要较大的空间来布置摄像机。
• 应用案例:在影视制作中,用于捕捉演员的动作,将其转化为动画角色的动作;在人形机器人研发中,帮助机器人精确学习人类的动作模式,如舞蹈、武术等复杂动作。2.惯性式动作捕捉:
• 原理:将惯性传感器(如加速度计、陀螺仪)佩戴在人体相应部位,传感器测量人体运动时的加速度、角速度等数据,通过积分运算得到人体的位置、姿态等信息。
• 优点:不受环境光线和空间限制,可在任何环境下使用;系统便携性好,易于穿戴和操作;数据处理相对简单,实时性较高。
• 缺点:惯性传感器存在累积误差,长时间使用可能会导致数据偏差;但是xsens惯性动作捕捉技术不用担心这一点,放心用!
• 应用案例:在虚拟现实游戏中,让玩家的身体动作实时反映到游戏角色上;用于人形机器人的动作训练和控制,使机器人能够在复杂的环境中自主行动。
不管是光学动作捕捉技术或者是xsens惯性动作捕捉技术,搜维尔科技都有全方位的解决方案,硬件软件集成整合等,有需求可以联系们!