恒定功率负载 (CPL) 存在于电动汽车、电信设备、电力电子设备等各种应用中。这些 CPL 是无论施加的电压或电流如何变化都保持恒定功耗的电气负载。与呈现恒定电阻的电阻负载不同,CPL 具有随电压或电流变化而变化的动态阻抗,即,当负载两端的电压降低时,它会吸收更多电流来补偿并保持恒定功率水平。
相反,当电压增加时,负载消耗更少的电流来维持相同的功率水平。例如。电动汽车中的电机驱动系统充当恒定功率负载,当车辆加速或爬坡时,功率需求保持恒定,但从电池汲取的电流会增加。在各种应用中,特别是在电信电源应用中,DC/DC 转换器用于为 CPL 供电。

图1:CPL的负阻抗特性
这些 CPL 对这些 DC/DC 转换器的稳定性提出了巨大的挑战,特别是当它们表现出负阻抗特性时。在传统的直流-直流转换器中,输出电压通过调节馈入转换器栅极端子的开关信号的占空比来调节。当负载是纯电阻性或具有正阻抗特性时,这种控制机制工作良好。但在具有负阻抗特性的 CPL 中,转换器的控制环路难以维持稳定的输出电压调节。这进一步导致电压出现尖峰、下降和纹波。
稳定电信基站收发器系统 (BTS) 的 DC/DC 全桥
在电信行业中,基站收发站 (BTS) 在保持移动网络正常运行并在其控制区域内发挥着重要作用。BTS 负责网络和用户设备(UE)(通常是智能手机)之间的无线电信号传输。必须保持 BTS 的不间断供电,以便该区域保持在移动网络覆盖范围内。
传统的 DC/AC/DC 由于其复杂性而不适用于此应用。因此,全桥或半桥拓扑 (FB/HB) 用于不同的电信应用,因为它只需要一个隔离变压器,并且更容易与太阳能等可再生能源集成。FB/HB 拓扑的缺点是它们具有更多的开关器件。由于电信负载是具有负阻抗特性的CPL,供应商单元和上游转换器具有显着的不稳定影响。
为了提高这些转换器在为 CPL 供电时的电压调节能力,已经进行了大量研究。这些研究通常涉及基于数据的控制器的设计,这些控制器的设计考虑了理想的系统操作。尽管如此,这些控制器仍无法在干扰和动态变化下稳定系统,特别是在电力电子系统中存在非理想时变 CPL 的情况下,这在 5G 电信应用中使用的 FB/HB 拓扑中很常见。
为了适应干扰和动态变化,可以使用无模型学习方法。这些模型使用无模型强化学习 (RL),其中控制器不需要知道转换器或负载的确切模型。相反,它通过反复试验来学习控制转换器。尽管这些神经网络能够在不与模型交互的情况下生成控制系数,但也存在一些缺点,这些控制器难以调试,并且无法有效地处理操作条件的所有突然变化。
在"用于稳定馈送恒定功率负载的全桥转换器的鲁棒人工智能控制器"一文中,作者提出了一种鲁棒控制器来有效控制表现出负阻抗特性的 CPL 的电源。所提出的控制器基于深度强化学习(DRL),这是一种机器学习技术,可以根据经验学习控制复杂系统。该控制器使用具有两个隐藏层的深度神经网络 (DNN) 来实现。DNN 的输入层接收转换器的状态变量,输出层生成控制信号。DNN 使用基于奖励的强化学习算法(称为软演员批评家 (SAC))进行训练。
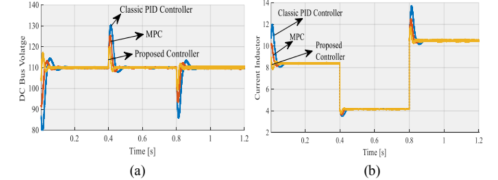
SAC算法是使用模拟环境进行训练的,该模拟环境是全桥变换器和恒功率负载的数学模型。SAC 算法经过训练,可在有限范围内化预期奖励。为了评估所设计的控制器的可行性,我们检查了两种情况:直流电源的变化和 CPL 功率的变化。还进行了硬件在环 (HiL) 检查,以实时检查控制器的性能。将仿真结果与 PI 控制器和模型预测控制 (MPS) 控制器进行比较。与 PI 和 MPC 控制器相比,所提出的控制器在超调和响应时间方面提供了更好的动态结果。
结论
几乎所有新时代应用中都存在恒定功率负载。为了使这些 CPL 高效运行,需要转换器即使在负载表现出负阻抗特性时也能在很宽的电压范围内提供恒定功率。这只能通过强大的控制器来实现,该控制器能够实时适应动态变化并持续提供无纹波、骤降和尖峰的电力。本文概述了所使用的各种控制技术。此外,它还详细介绍了基于 SAC-DRL 的控制器,该控制器在控制电信 CPL 时的动态性能优于基于 PI 和 MPS 的控制器。