一.题目分析
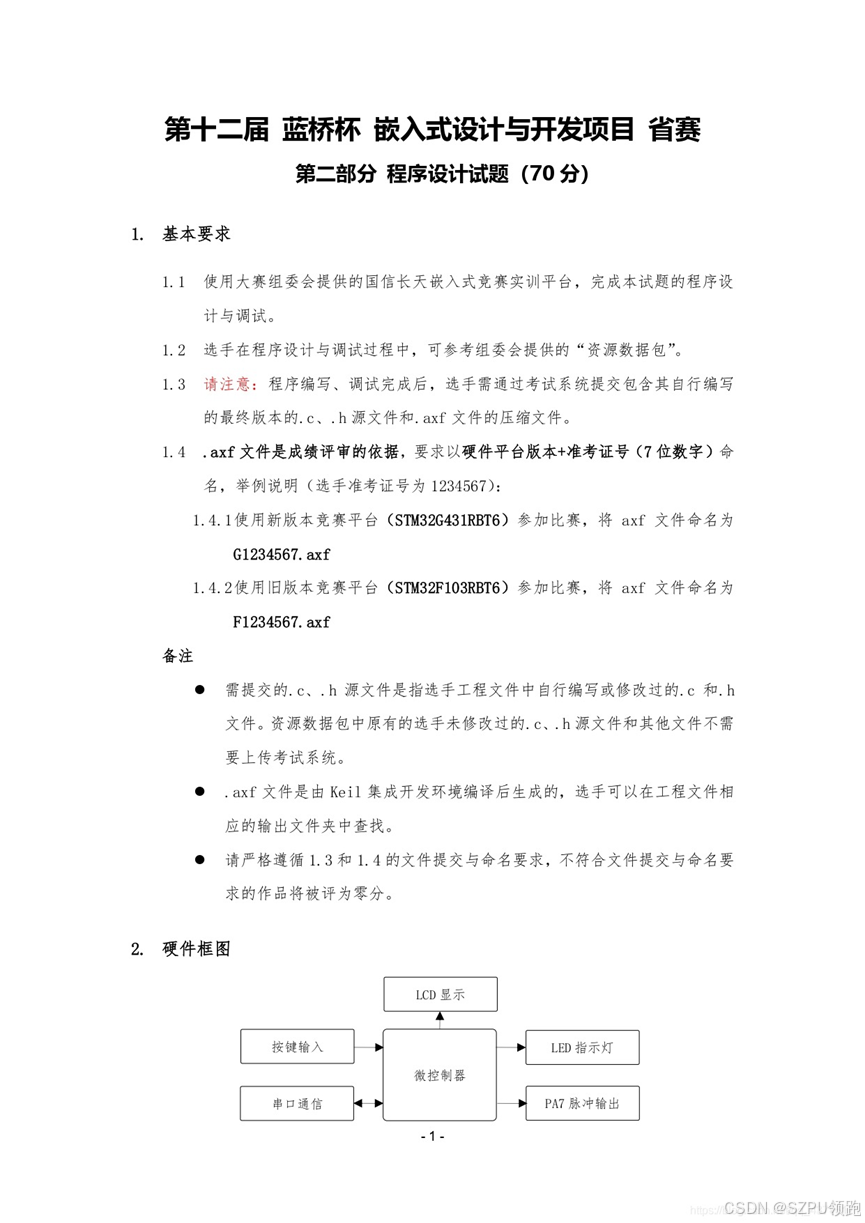
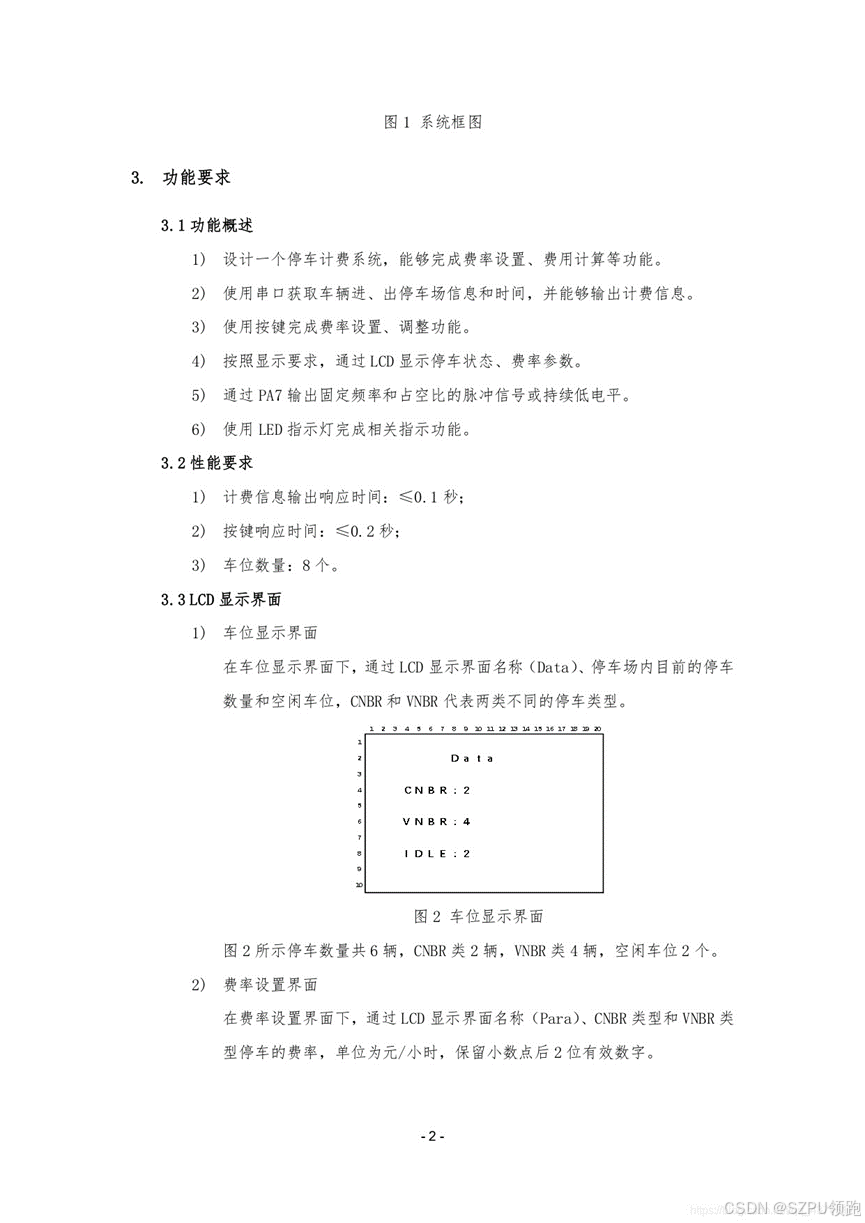
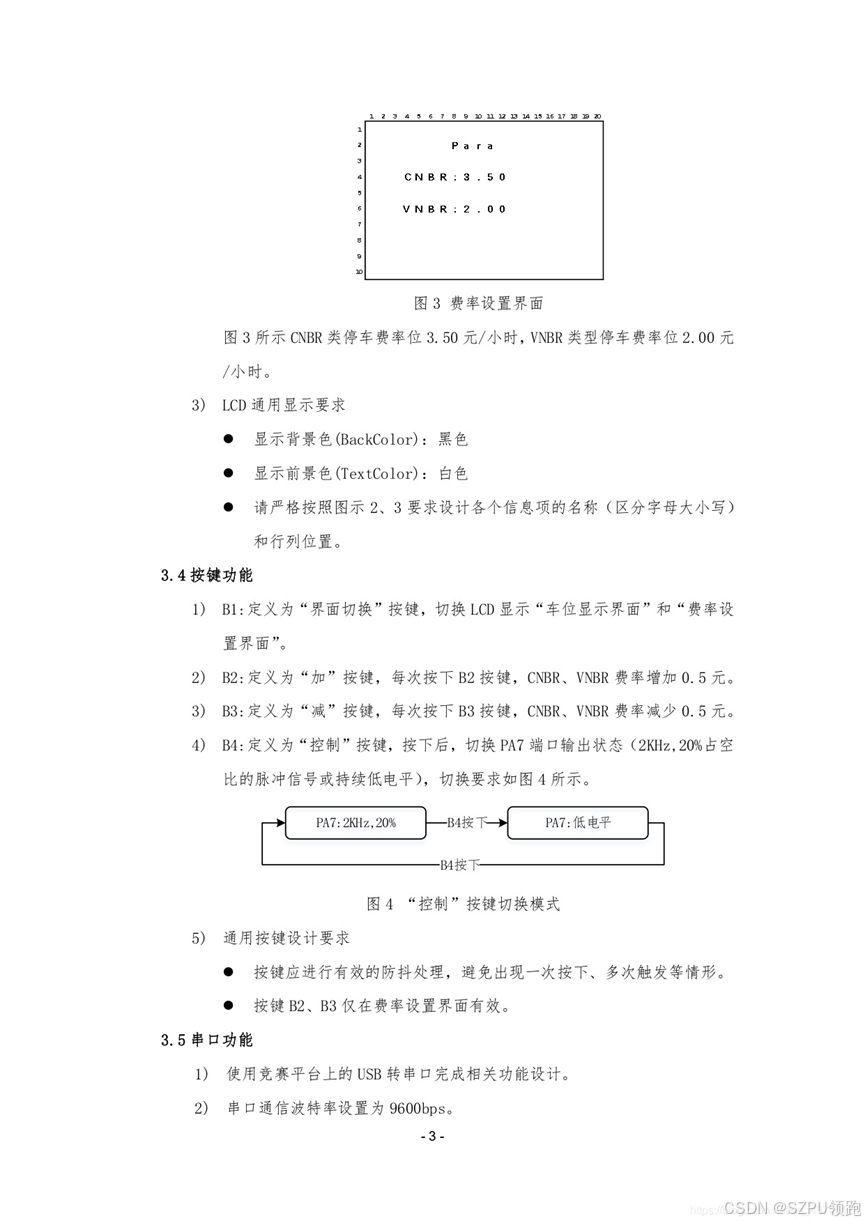
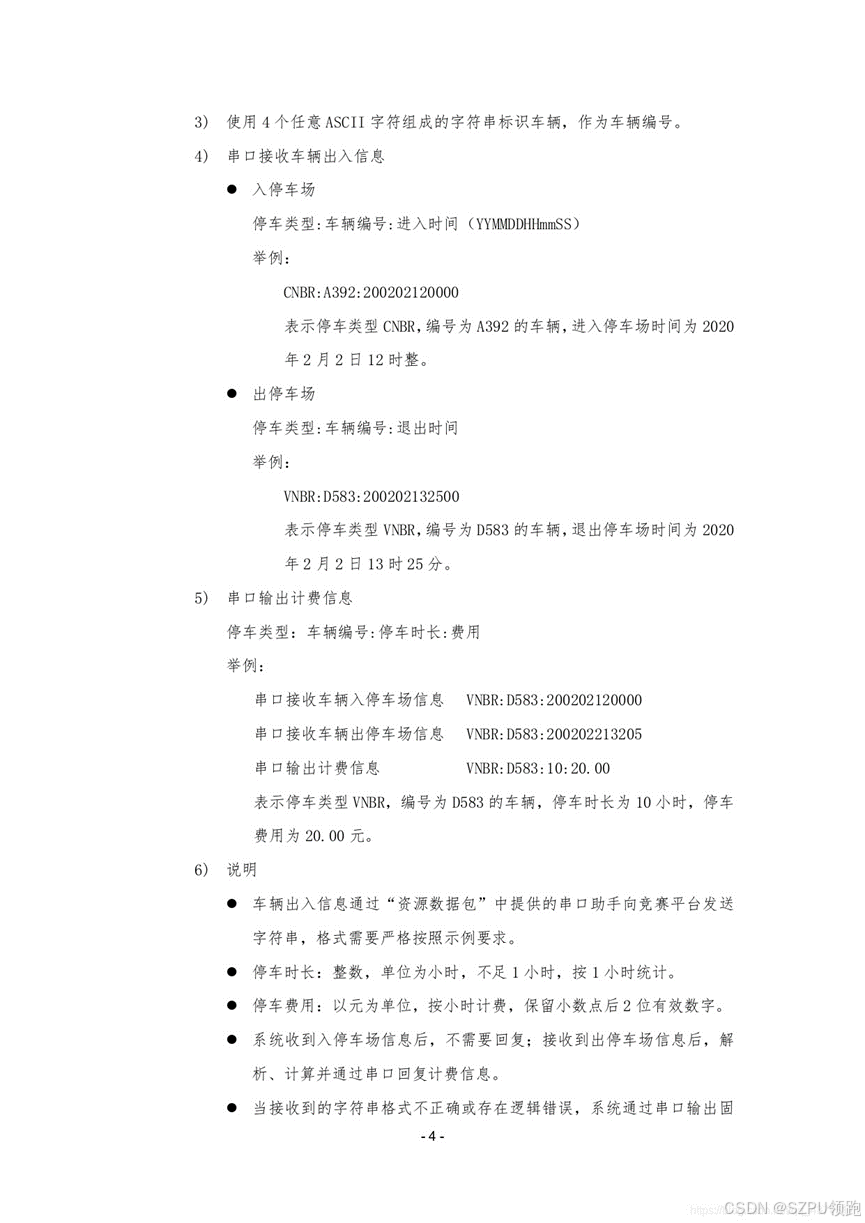
(1).题目
(2).题目分析
1.串口功能分析
a.串口接收车辆出入信息:通过查询车库的车判断车辆是进入/出去
b.串口输出计费信息:输出编号,时长和费用
c.计算停车时长是难点,需要将年月日时分秒全部都转换成秒
d.当接收到的字符串格式不正确或者逻辑错误就输出Error
e.数据库
22个字节构成一组,最多有八组,然后定义结构体变量,该结构体的数据结构为车类型+车编号+时间的数据格式,用该结构体变量,创造一个数组
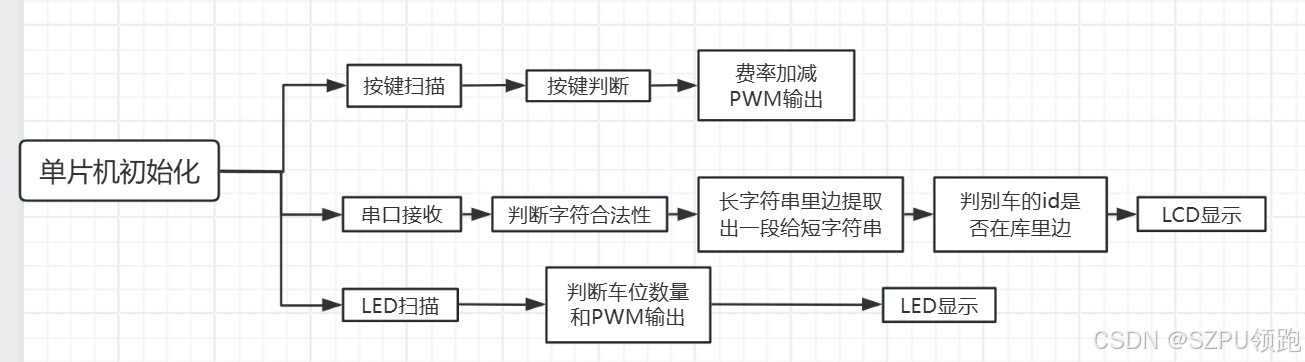
(3).逻辑导图
二.CubeMX配置
由于蓝桥杯使用的板子都是STM32G431RBT6,配置都是相同的,模板已经在第六届蓝桥杯嵌入式省赛程序设计题解析(基于HAL库)-CSDN博客配置完成,大家可以前往学习
三.相关代码实现
(1)MAIN
1.全局变量声明
cpp
#include "main.h"
#include "RCC\bsp_rcc.h"
#include "KEY_LED\bsp_key_led.h"
#include "LCD\bsp_lcd.h"
#include "UART\bsp_uart.h"
#include "TIM\bsp_tim.h"
#include <string.h>
//***全局变量声明区
//*减速变量
__IO uint32_t uwTick_Key_Set_Point = 0;//控制Key_Proc的执行速度
__IO uint32_t uwTick_Led_Set_Point = 0;//控制Led_Proc的执行速度
__IO uint32_t uwTick_Lcd_Set_Point = 0;//控制Lcd_Proc的执行速度
__IO uint32_t uwTick_Usart_Set_Point = 0;//控制Usart_Proc的执行速度
//*按键扫描专用变量
uint8_t ucKey_Val, unKey_Down, ucKey_Up, ucKey_Old;
//*LED专用变量
uint8_t ucLed;
//*LCD显示专用变量
uint8_t Lcd_Disp_String[21];//最多显示20个字符
//*串口专用变量
uint16_t counter = 0;
uint8_t str_str[40];
uint8_t rx_buffer;
//***子函数声明区
void Key_Proc(void);
void Led_Proc(void);
void Lcd_Proc(void);
void Usart_Proc(void);
//全局变量区
_Bool Disp_Num;//0-数据显示,1-费率设置
_Bool PWM_Output_Num;//0-低电平,1-PWM
float VNBR_Price = 2.00;
float CNBR_Price = 3.50;
uint8_t VNBR_Use_Num;
uint8_t CNBR_Use_Num;
uint8_t No_Use_Num = 8;
uint8_t RX_BUF[200];//用于缓冲接收200个字节的数量
uint8_t Rx_Counter;//用于记录接收了多少个数据,同时可以索引RX_BUF中的数据位置
typedef struct
{
uint8_t type[5];
uint8_t id[5];
uint8_t year_in;
uint8_t month_in;
uint8_t day_in;
uint8_t hour_in;
uint8_t min_in;
uint8_t sec_in;
_Bool notEmpty;
} Car_Data_Storage_Type;
Car_Data_Storage_Type Car_Data_Storage[8];//数据库构建完毕,用于存储8个进来的车的信息2.系统主函数
cpp
int main(void)
{
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* Configure the system clock */
SystemClock_Config();
/*bsp资源的初始化*/
KEY_LED_Init();
LCD_Init();
LCD_Clear(Black);
LCD_SetBackColor(Black);
LCD_SetTextColor(White);
UART1_Init();
PWM_OUTPUT_TIM17_Init();
//*串口接收中断打开
HAL_UART_Receive_IT(&huart1, (uint8_t *)(&rx_buffer), 1);
__HAL_TIM_SET_COMPARE(&htim17,TIM_CHANNEL_1, 0);//强制配置成低电平
HAL_TIM_PWM_Start(&htim17,TIM_CHANNEL_1); //PA7
while (1)
{
Key_Proc();
Led_Proc();
Lcd_Proc();
Usart_Proc();
}
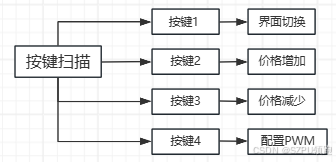
}3.按键扫描子函数
a. 逻辑框图
b. 程序源码
cpp
//***按键扫描子函数
void Key_Proc(void)
{
if((uwTick - uwTick_Key_Set_Point)<50) return;//减速函数
uwTick_Key_Set_Point = uwTick;
ucKey_Val = Key_Scan();
unKey_Down = ucKey_Val & (ucKey_Old ^ ucKey_Val);
ucKey_Up = ~ucKey_Val & (ucKey_Old ^ ucKey_Val);
ucKey_Old = ucKey_Val;
switch(unKey_Down)
{
case 1://B1
Disp_Num ^= 0x1;
LCD_Clear(Black);
break;
case 2://B2
if(Disp_Num == 1)//费率设置界面
{
VNBR_Price += 0.5;
CNBR_Price += 0.5;
}
break;
case 3://B3
if(Disp_Num == 1)//费率设置界面
{
if((VNBR_Price - 0.5)> 0)
{
VNBR_Price -= 0.5;
CNBR_Price -= 0.5;
}
}
break;
case 4://B4
PWM_Output_Num ^= 0x1;
if(PWM_Output_Num == 0)//低电平
{
__HAL_TIM_SET_COMPARE(&htim17,TIM_CHANNEL_1, 0);//强制配置成低电平
}
else//高电平
{
__HAL_TIM_SET_COMPARE(&htim17,TIM_CHANNEL_1, 100);//强制配置成PWM电平
}
break;
}
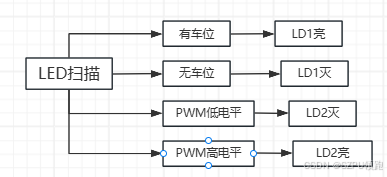
}4.LED扫描子函数
a. 逻辑框图
b. 程序源码
cpp
void Led_Proc(void)
{
if((uwTick - uwTick_Led_Set_Point)<200) return;//减速函数
uwTick_Led_Set_Point = uwTick;
if(No_Use_Num > 0)//表示还有车位
{
ucLed |= 0x1;
}
else//如果空闲
{
ucLed &= (~0x1);
}
if(PWM_Output_Num == 0)//低电平
{
ucLed &= (~0x2);
}
else//PWM
{
ucLed |= 0x2;
}
LED_Disp(ucLed);
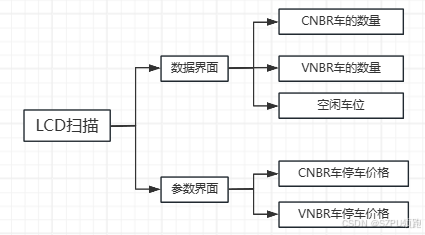
}5. LCD扫描
a. 程序框图
b. 程序源码
cpp
void Lcd_Proc(void)
{
if((uwTick - uwTick_Lcd_Set_Point)<100) return;//减速函数
uwTick_Lcd_Set_Point = uwTick;
//用户代码
if(Disp_Num == 0)//数据界面
{
sprintf((char *)Lcd_Disp_String, " Data");
LCD_DisplayStringLine(Line1, Lcd_Disp_String);
sprintf((char *)Lcd_Disp_String, " CNBR:%1d",(unsigned int)CNBR_Use_Num);
LCD_DisplayStringLine(Line3, Lcd_Disp_String);
sprintf((char *)Lcd_Disp_String, " VNBR:%1d",(unsigned int)VNBR_Use_Num);
LCD_DisplayStringLine(Line5, Lcd_Disp_String);
sprintf((char *)Lcd_Disp_String, " IDLE:%1d",(unsigned int)No_Use_Num);
LCD_DisplayStringLine(Line7, Lcd_Disp_String);
}
else//参数界面
{
sprintf((char *)Lcd_Disp_String, " Para");
LCD_DisplayStringLine(Line1, Lcd_Disp_String);
sprintf((char *)Lcd_Disp_String, " CNBR:%4.2f",CNBR_Price);
LCD_DisplayStringLine(Line3, Lcd_Disp_String);
sprintf((char *)Lcd_Disp_String, " VNBR:%4.2f",VNBR_Price);
LCD_DisplayStringLine(Line5, Lcd_Disp_String);
}
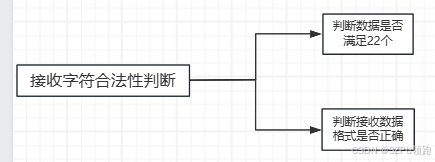
}6. 判别接收到22个字符是否合法函数
a. 逻辑框图
b. 程序源码
cpp
_Bool CheckCmd(uint8_t* str)//用于判别接受的22个字符是否合法
{
if(Rx_Counter != 22)
return 0;//表示还不够22个数据
if(((str[0]=='C')||(str[0]=='V'))&&(str[1]=='N')&&(str[2]=='B')&&(str[3]=='R')&&(str[4]==':')&&(str[9]==':'))
{
uint8_t i;
for(i = 10; i< 22;i++)
{
if((str[i]>'9')||(str[i]<'0'))
return 0;
}
return 1;//表示接收到的数据没问题
}
}7. 从长字符串提取一段给短字符串函数
a. 逻辑分析
传入参数为(数据的类型,提取的位置,从第几位开始提取,提取的个数)
b. 程序源码
cpp
void substr(uint8_t* d_str, uint8_t* s_str, uint8_t locate, uint8_t length)//从长字符串里边提取出一段给短字符串
{
uint8_t i = 0;
for(i=0; i<length; i++)
{
d_str[i] = s_str[locate + i];
}
d_str[length] = '\0';
}8.判别车是否在车库里面
a.逻辑分析
使用到了strcmp函数比较字符串是否相同,相同就返回0
【函数原型】 int strcmp(const char *s1, const char *s2);
【参数】s1, s2 为需要比较的两个字符串。
【返回值】若参数s1 和s2 字符串相同则返回0,s1 若大于s2 则返回大于0 的值,s1 若小于s2 则返回小于0 的值
b.程序源码
cpp
//判别车的id是否在库里边
uint8_t isExist(uint8_t* str)
{
uint8_t i = 0;
for(i=0; i<8; i++)
{
if((strcmp((const char*)str,(const char*)Car_Data_Storage[i].id)) == 0)//表示字符串匹配,有这个字符串
{
return i;//如果该id在数据库存着,返回这个id在数据库当中的位置
}
}
return 0xFF;//如果没有,返回oxff
}9.判断0-7号,哪个位置有空挡
a.逻辑分析
轮询数据库里面的空档标志位,当标志位为0说明没有被使用,则返回第i号位置
b.程序源码
cpp
uint8_t findLocate(void)
{
uint8_t i = 0;
for(i = 0;i <= 7; i++ )
{
if(Car_Data_Storage[i].notEmpty == 0)
return i;//0-7号位
}
return 0XFF;
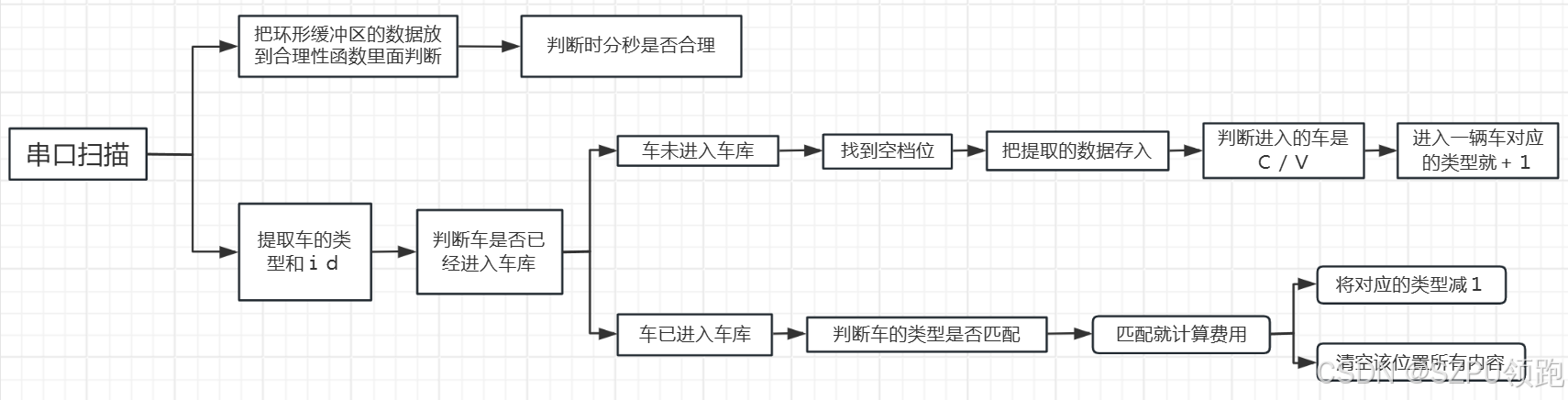
}10.串口扫描子函数
a.逻辑框图
b.程序源码
cpp
void Usart_Proc(void)
{
if((uwTick - uwTick_Usart_Set_Point)<100) return;//减速函数
uwTick_Usart_Set_Point = uwTick;
if(CheckCmd(RX_BUF))//粗糙的判断,第一步,判别数据个数以及数据格式是否合法
{
uint8_t car_id[5];
uint8_t car_type[5];
uint8_t year_temp,month_temp,day_temp,hour_temp,min_temp,sec_temp;
year_temp = (((RX_BUF[10] - '0')*10) + (RX_BUF[11] - '0'));
month_temp = (((RX_BUF[12] - '0')*10) + (RX_BUF[13] - '0'));
day_temp = (((RX_BUF[14] - '0')*10) + (RX_BUF[15] - '0'));
hour_temp = (((RX_BUF[16] - '0')*10) + (RX_BUF[17] - '0'));
min_temp = (((RX_BUF[18] - '0')*10) + (RX_BUF[19] - '0'));
sec_temp = (((RX_BUF[20] - '0')*10) + (RX_BUF[21] - '0'));
if((month_temp>12)||(day_temp>31)||(hour_temp>23)||(min_temp>59)||(sec_temp>59))//验证日期和时间是否合法
{
goto SEND_ERROR;
}
substr(car_id, RX_BUF, 5, 4);//提取车的id
substr(car_type, RX_BUF, 0, 4); //提取车的类型
//**********************车还没有进入******
if(isExist(car_id) == 0xFF)//表示库里边没有这辆车的ID,表示这个车还没进入
{
uint8_t locate = findLocate();//找到哪个地方是空的
if(locate == 0xFF)//没有找到哪个地方是空的
{
goto SEND_ERROR;
}
//准备存储
substr(Car_Data_Storage[locate].type, car_type, 0, 4);//把当前车的类型存入
substr(Car_Data_Storage[locate].id, car_id, 0, 4);//把当前车的id存入
Car_Data_Storage[locate].year_in = year_temp;
Car_Data_Storage[locate].month_in = month_temp;
Car_Data_Storage[locate].day_in = day_temp;
Car_Data_Storage[locate].hour_in = hour_temp;
Car_Data_Storage[locate].min_in = min_temp;
Car_Data_Storage[locate].sec_in = sec_temp;
Car_Data_Storage[locate].notEmpty = 1;
if(Car_Data_Storage[locate].type[0] == 'C')
CNBR_Use_Num++;
else if(Car_Data_Storage[locate].type[0] == 'V')
VNBR_Use_Num++;
No_Use_Num--;
}
//**********************如果车已经进来了,现在是出去******
else if(isExist(car_id) != 0xFF)//表示数据库里有他的信息,返回他在数据库的位置
{
int64_t Second_derta;//用于核算小时的差值
uint8_t in_locate = isExist(car_id);//记住在数据库中的位置
if(strcmp((const char*)car_type,(const char*)Car_Data_Storage[in_locate].type) != 0)//说明不匹配
{
goto SEND_ERROR;
}
//2000 2001 2002 //1 2 3
Second_derta = (year_temp - Car_Data_Storage[in_locate].year_in)*365*24*60*60 + (month_temp - Car_Data_Storage[in_locate].month_in)*30*24*60*60+\
(day_temp - Car_Data_Storage[in_locate].day_in)*24*60*60 + (hour_temp - Car_Data_Storage[in_locate].hour_in)*60*60 + \
(min_temp - Car_Data_Storage[in_locate].min_in)*60 + (sec_temp - Car_Data_Storage[in_locate].sec_in);
if(Second_derta < 0)//说明出去的时间超前进去的时间
{
goto SEND_ERROR;
}
Second_derta = (Second_derta + 3599)/3600; //小时数据已经核算出来
sprintf(str_str, "%s:%s:%d:%.2f\r\n",Car_Data_Storage[in_locate].type,Car_Data_Storage[in_locate].id,(unsigned int)Second_derta,(Second_derta*(Car_Data_Storage[in_locate].id[0]=='C'?CNBR_Price:VNBR_Price)));
HAL_UART_Transmit(&huart1,(unsigned char *)str_str, strlen(str_str), 50);
if(Car_Data_Storage[in_locate].type[0] == 'C')
CNBR_Use_Num--;
else if(Car_Data_Storage[in_locate].type[0] == 'V')
VNBR_Use_Num--;
No_Use_Num++;
memset(&Car_Data_Storage[in_locate],0,sizeof(Car_Data_Storage[in_locate]));//清空该位置所有内容,为0
}
goto CMD_YES;
SEND_ERROR:
sprintf(str_str, "Error\r\n");
HAL_UART_Transmit(&huart1,(unsigned char *)str_str, strlen(str_str), 50);
CMD_YES:
memset(&RX_BUF[0],0,sizeof(RX_BUF));//清空该位置所有内容,为0
Rx_Counter = 0;
}
}11.串口接收中断回调函数
a.逻辑分析
实现将字符数据保存到环形缓冲区里面
b. 程序源码
cpp
//串口接收中断回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
RX_BUF[Rx_Counter] = rx_buffer;
Rx_Counter++;
HAL_UART_Receive_IT(&huart1, (uint8_t *)(&rx_buffer), 1);
}(2)BSP
在 第六届蓝桥杯嵌入式省赛程序设计题解析(基于HAL库)-CSDN博客里面有详细的讲解,大家可前往此链接学习