🌟🌟 欢迎来到我的技术小筑,一个专为技术探索者打造的交流空间。在这里,我们不仅分享代码的智慧,还探讨技术的深度与广度。无论您是资深开发者还是技术新手,这里都有一片属于您的天空。让我们在知识的海洋中一起航行,共同成长,探索技术的无限可能。
🚀 探索专栏:学步_技术的首页 ------ 持续学习,不断进步,让学习成为我们共同的习惯,让总结成为我们前进的动力。
🔍 技术导航:
- 人工智能:深入探讨人工智能领域核心技术。
- 自动驾驶:分享自动驾驶领域核心技术和实战经验。
- 环境配置:分享Linux环境下相关技术领域环境配置所遇到的问题解决经验。
- 图像生成:分享图像生成领域核心技术和实战经验。
- 虚拟现实技术:分享虚拟现实技术领域核心技术和实战经验。
🌈 非常期待在这个数字世界里与您相遇,一起学习、探讨、成长。不要忘了订阅本专栏,让我们的技术之旅不再孤单!
💖💖💖 ✨✨ 欢迎关注和订阅,一起开启技术探索之旅! ✨✨
文章目录
- [1. 背景介绍](#1. 背景介绍)
- [2. GPS工作原理](#2. GPS工作原理)
- [3. GPS分类](#3. GPS分类)
-
- [3.1 全球卫星导航系统(GNSS)](#3.1 全球卫星导航系统(GNSS))
- [3.2 星基增强系统(SBAS)](#3.2 星基增强系统(SBAS))
- [3.3 地基增强系统(GBAS)](#3.3 地基增强系统(GBAS))
- [4. GPS应用类型](#4. GPS应用类型)
-
- [4.1 绝对定位](#4.1 绝对定位)
- [4.2 相对定位](#4.2 相对定位)
- [4.3 静态定位](#4.3 静态定位)
- [4.4 动态定位](#4.4 动态定位)
- [5. GPS核心关键指标](#5. GPS核心关键指标)
- [6. GPS优缺点](#6. GPS优缺点)
-
- [6.1 优点](#6.1 优点)
- [6.2 缺点](#6.2 缺点)
- [7. 选型指南](#7. 选型指南)
- [8. 应用场景](#8. 应用场景)
- [9. 数据结构](#9. 数据结构)
- [10. 总结与讨论](#10. 总结与讨论)
1. 背景介绍
在自动驾驶中,定位是核心功能之一。精确的定位信息不仅关乎车辆的导航,还影响车辆的安全决策和运动控制。
卫星导航系统(GNSS)是自动驾驶车辆主要依赖的定位技术之一,其中全球定位系统(GPS)作为最常用的导航系统,为车辆提供精准的位置信息。
在本文中,我们将介绍GPS的工作原理、分类、应用场景以及其优缺点。
2. GPS工作原理
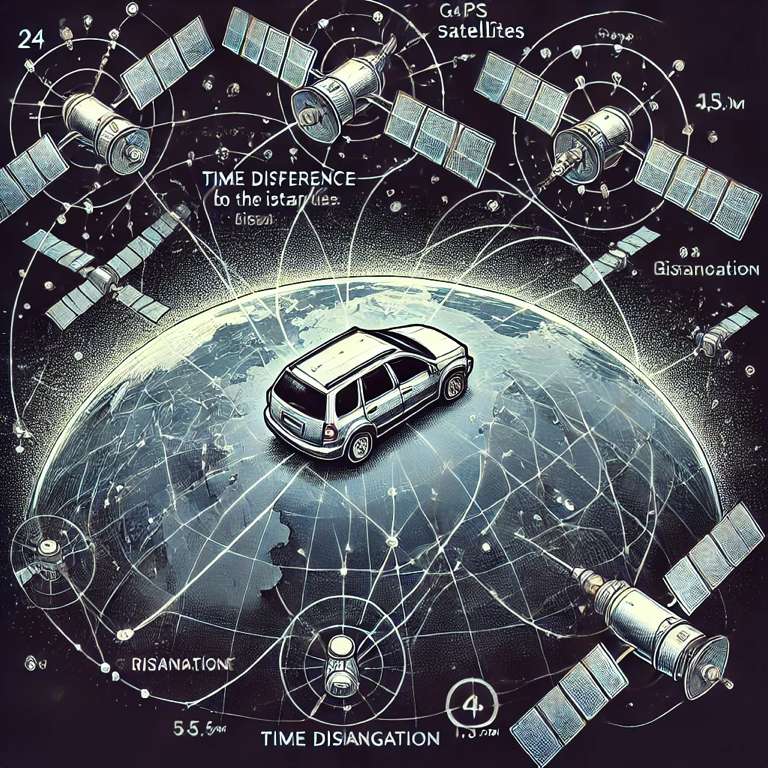
全球定位系统(GPS)依赖于24颗在地球轨道上运行的卫星来向地面发射信号,这些信号由用户的接收机接收并处理,以确定其在地球表面的精确位置。
其具体工作原理如下:
-
卫星信号传输 :
GPS卫星不断向地球发送信号,其中包含该卫星的精确位置和发送信号的时间戳。每颗GPS卫星都携带有高精度的原子钟,确保时间数据的准确性。
-
信号接收 :
地面上的GPS接收机同时接收来自多颗卫星的信号。接收机通常需要接收到至少四颗卫星的信号,以进行精确的定位计算。
-
时间差计算 :
接收机通过对比接收到的每颗卫星信号的时间戳,计算信号的传播时间差。由于信号是以光速传播的,通过计算信号传播的时间差,接收机可以确定每颗卫星与接收机之间的距离。
-
位置确定 :
使用三角测量法,接收机将从多颗卫星接收到的距离数据进行组合处理,结合卫星的已知位置,最终计算出接收机的三维坐标,包括经度、纬度和高度。
更详细的说明如下:
-
光速传输与时间误差 :
卫星信号是以光速传播的,光速约为每秒299,792公里。由于光速极快,哪怕是极小的时间误差(如纳秒级的误差)也会导致较大的位置误差。因此,GPS接收机不仅要处理来自卫星的信号时间,还需考虑接收机自身时钟与卫星时钟之间的差异。为了校正这一误差,接收机需要同时接收到至少四颗卫星的信号,利用额外的卫星信号来计算并修正时间偏差。
-
三角测量与4颗卫星 :
GPS定位是基于三角测量法。三角测量要求至少三个已知的参考点来确定一个未知的位置(二维空间)。然而,GPS定位是在三维空间中进行的,因此需要四颗卫星信号。前三颗卫星确定的是空间中的位置坐标,第四颗卫星信号则用于校正时间误差,确保定位精度。
-
高精度需求 :
GPS接收机在处理信号时,不仅要考虑光速传播的延时,还要考虑各种干扰因素,如大气层对信号的影响、地球潮汐效应等。这些因素都可能对最终的定位精度产生影响。因此,现代GPS接收机通常会与其他传感器(如IMU、加速度计)结合使用,以提高精度并减少信号失效时的误差累积。
3. GPS分类
3.1 全球卫星导航系统(GNSS)
全球卫星导航系统是由多个国家开发的,提供全球范围的定位服务,包括:
- GPS(美国):覆盖全球,提供高精度的定位服务。
- GLONASS(俄罗斯):与GPS类似,提供全球导航服务。
- 北斗(中国):提供区域和全球的导航服务,并支持短报文功能。
- Galileo(欧盟):为民用和商业提供高精度定位服务。
3.2 星基增强系统(SBAS)
卫星增强系统通过在GNSS信号基础上进行差分修正,提升定位精度。例如,WAAS(美国)、EGNOS(欧洲)、MSAS(日本)等,能够将定位精度提升至1米以内。
3.3 地基增强系统(GBAS)
地基增强系统依赖于地面站提供的修正信息,进一步提升定位精度。该技术用于需要厘米级别精度的应用,例如高精度地图匹配和车辆控制。
| 系统类型 | 名称 | 国家/地区 | 功能 | 精度范围 |
|---|---|---|---|---|
| 全球卫星导航系统(GNSS) | GPS | 美国 | 提供全球定位服务 | 几米级定位精度 |
| 全球卫星导航系统(GNSS) | GLONASS | 俄罗斯 | 提供全球导航服务 | 几米级定位精度 |
| 全球卫星导航系统(GNSS) | 北斗 | 中国 | 提供区域和全球导航服务 | 几米级定位精度,支持短报文 |
| 全球卫星导航系统(GNSS) | Galileo | 欧盟 | 为民用和商业提供高精度服务 | 几米级定位精度 |
| 星基增强系统(SBAS) | WAAS | 美国 | 提升GPS的定位精度 | 提升至1米以内 |
| 星基增强系统(SBAS) | EGNOS | 欧洲 | 提升Galileo的定位精度 | 提升至1米以内 |
| 星基增强系统(SBAS) | MSAS | 日本 | 提升GNSS的定位精度 | 提升至1米以内 |
| 地基增强系统(GBAS) | 北斗地基增强系统 | 中国 | 通过地面站提供厘米级精度 | 厘米级精度 |
| 地基增强系统(GBAS) | GBAS | 各国 | 提供高精度地图匹配和车辆控制 | 厘米级精度 |
4. GPS应用类型
4.1 绝对定位
绝对定位是最常见的GPS应用类型,利用单一的GPS接收机直接从多个卫星获取位置信息,从而确定车辆或物体在全球坐标系中的位置。该技术广泛应用于日常导航,如手机导航、车辆导航等。虽然绝对定位的精度一般在几米左右,但对于大多数日常应用来说已经足够。
应用场景:
- 日常导航(如车载导航、手机地图)
- 救援、救灾中的地理位置定位
- 户外运动中的个人位置追踪
4.2 相对定位
相对定位需要使用两个或多个GPS接收机,其中一个接收机位于已知位置(基准站),另一个位于待测物体上。通过测量两个接收机之间的相对距离来提高定位精度。相对定位经常用于需要高精度的场景,例如地理勘测、无人驾驶车辆的高精度地图匹配等。相对定位技术可以达到厘米级的精度,尤其适合无人驾驶、农业自动化等高精度需求。
应用场景:
- 自动驾驶中的高精度地图匹配
- 精密农业中的地块测绘与导航
- 大型工程的建筑测量与规划
4.3 静态定位
静态定位适用于固定点的位置测定。在静态定位中,GPS接收机被放置在一个静止位置上,进行长时间的观测,以获得高精度的地理坐标。静态定位常用于地理信息系统(GIS)数据采集、高精度地面测量等领域,通常能够达到亚米级到厘米级的精度。
应用场景:
- 高精度地理信息系统数据采集
- 地质勘探、矿产资源定位
- 大型建筑的地基勘测
4.4 动态定位
动态定位应用于运动中的物体,通过GPS接收机对运动中的目标进行持续跟踪和定位。该方法能够实时计算物体的位置信息,适合用于车辆、船只、无人机等动态目标的定位。动态定位经常结合IMU、雷达等其他传感器,提升整体的定位精度与稳定性。
应用场景:
- 无人驾驶车辆的实时导航与控制
- 物流运输中的车辆追踪与调度
- 船舶、无人机的远程导航与监控
5. GPS核心关键指标
选择适合自动驾驶的GPS系统时,需考虑以下关键指标:
| 指标 | 描述 |
|---|---|
| 定位精度 | GPS的定位精度一般在5-10米左右,借助差分GPS可达厘米级。 |
| 更新时间 | GPS的更新时间决定了系统刷新位置信息的速度,通常为1Hz。 |
| 覆盖范围 | 全球卫星导航系统通常可以提供全球范围内的定位服务。 |
| 抗干扰能力 | GPS系统容易受到大气、障碍物等干扰,抗干扰能力是关键。 |
| 功耗 | 自动驾驶中使用的GPS接收机需要低功耗,适合长期运行。 |
6. GPS优缺点
6.1 优点
- 全球覆盖:GPS能够提供全球范围内的位置信息,适用于各种地理环境。
- 全天候运行:不受天气、光照等外界条件影响,能够提供全天候定位服务。
- 成熟技术:GPS技术已经非常成熟,硬件成本相对较低。
6.2 缺点
- 定位误差较大:受天气、建筑物遮挡等影响,GPS在城市峡谷等复杂环境中的误差较大。
- 依赖卫星信号:地下停车场、隧道等环境下,GPS信号难以稳定接收。
- 更新速率低:传统GPS更新速率较低,不适合高动态环境。
7. 选型指南
在选择适用于自动驾驶的GPS系统时,应重点考虑以下因素:
- 定位精度:不同应用场景对定位精度要求不同,差分GPS或GNSS增强系统可以提高精度。
- 实时性要求:对于自动驾驶车辆,GPS的刷新率需要足够高,通常1Hz或更高。
- 环境适应性:自动驾驶车辆需能够在不同地形、复杂环境中正常工作,因此需要选择具备良好抗干扰能力的GPS设备。
- 功耗:低功耗是GPS设备选型的重要标准之一,特别是在自动驾驶系统中,长期续航能力至关重要。
8. 应用场景
| 场景 | 描述 |
|---|---|
| 高速公路驾驶 | 在高速驾驶时,GPS用于提供长距离导航和路径规划。 |
| 城市驾驶 | 在城市驾驶场景中,GPS结合高精地图,能够实现精确的车道级导航。 |
| 自动泊车 | 在泊车时,GPS提供车辆的位置信息,结合其他传感器,完成泊车任务。 |
| 无人配送 | 无人配送车通过GPS进行路径规划,确保在城市和乡村环境中的精准导航。 |
9. 数据结构
C++
// 定义GPS数据的结构体
struct GPSData {
double latitude; // 纬度
double longitude; // 经度
double altitude; // 海拔高度
double timestamp; // 时间戳,用于记录接收信号的时间
double speed; // 速度
double heading; // 方向,表示运动方向的角度
double hdop; // 水平精度因子 (Horizontal Dilution of Precision)
double vdop; // 垂直精度因子 (Vertical Dilution of Precision)
int satellite_count; // 可见卫星的数量
};
// GPS设备类,用于模拟或记录GPS的操作
class GPSDevice {
public:
// 构造函数
GPSDevice() : latitude(0.0), longitude(0.0), altitude(0.0), timestamp(0.0), speed(0.0), heading(0.0), hdop(0.0), vdop(0.0), satellite_count(0) {}
// 更新GPS数据
void updateGPSData(double lat, double lon, double alt, double time, double spd, double head, double h_dp, double v_dp, int sat_count) {
data.latitude = lat;
data.longitude = lon;
data.altitude = alt;
data.timestamp = time;
data.speed = spd;
data.heading = head;
data.hdop = h_dp;
data.vdop = v_dp;
data.satellite_count = sat_count;
}
// 获取当前GPS数据
GPSData getGPSData() {
return data;
}
// 打印GPS数据
void printGPSData() {
std::cout << "Latitude: " << data.latitude << "\n";
std::cout << "Longitude: " << data.longitude << "\n";
std::cout << "Altitude: " << data.altitude << " meters\n";
std::cout << "Timestamp: " << data.timestamp << " seconds\n";
std::cout << "Speed: " << data.speed << " m/s\n";
std::cout << "Heading: " << data.heading << " degrees\n";
std::cout << "HDOP: " << data.hdop << "\n";
std::cout << "VDOP: " << data.vdop << "\n";
std::cout << "Satellite Count: " << data.satellite_count << "\n";
}
private:
GPSData data; // GPS数据
};10. 总结与讨论
GPS技术在自动驾驶领域扮演了至关重要的角色,通过提供全球范围内的定位信息,支撑车辆的导航、控制与决策。然而,GPS在精度、覆盖范围和更新速率等方面的局限性,导致自动驾驶系统还需与其他传感器(如IMU、激光雷达)进行数据融合,以弥补单一技术的不足。随着技术的发展,未来GPS与其他技术的结合将进一步提升自动驾驶车辆的定位能力,为安全、智能的驾驶体验提供更加可靠的保障。
🌟 在这篇博文的旅程中,感谢您的陪伴与阅读。如果内容对您有所启发或帮助,请不要吝啬您的点赞 👍🏻,这是对我最大的鼓励和支持。
📚 本人虽致力于提供准确且深入的技术分享,但学识有限,难免会有疏漏之处。如有不足或错误,恳请各位业界同仁在评论区留下宝贵意见,您的批评指正是我不断进步的动力!😄😄😄
💖💖💖 如果您发现这篇博文对您的研究或工作有所裨益,请不吝点赞、收藏,或分享给更多需要的朋友,让知识的力量传播得更远。
🔥🔥🔥 "Stay Hungry, Stay Foolish" ------ 求知的道路永无止境,让我们保持渴望与初心,面对挑战,勇往直前。无论前路多么漫长,只要我们坚持不懈,终将抵达目的地。🌙🌙🌙
👋🏻 在此,我也邀请您加入我的技术交流社区,共同探讨、学习和成长。让我们携手并进,共创辉煌!
