💯 欢迎光临清流君的博客小天地,这里是我分享技术与心得的温馨角落 💯
🔥 个人主页:【清流君】🔥 📚 系列专栏:运动控制 | 决策规划 | 机器人数值优化 📚 🌟始终保持好奇心,探索未知可能性🌟


文章目录
- 引言
- 一、功能说明
-
- [1.1 自动交叉口](#1.1 自动交叉口)
- [1.2 锁定交叉口](#1.2 锁定交叉口)
- [1.3 默认停靠位置](#1.3 默认停靠位置)
- 二、创建交叉口
-
- [2.1 在不重叠的道路之间创建交叉口](#2.1 在不重叠的道路之间创建交叉口)
- [2.2 在两条平行道路之间创建交叉口](#2.2 在两条平行道路之间创建交叉口)
- [2.3 沿单条道路创建交叉口](#2.3 沿单条道路创建交叉口)
- 三、管理交叉口
-
- [3.1 移除锁定的交叉口](#3.1 移除锁定的交叉口)
- [3.2 将自动交叉口转换为锁定交叉口](#3.2 将自动交叉口转换为锁定交叉口)
- [3.3 将锁定交叉口转换为自动交叉口](#3.3 将锁定交叉口转换为自动交叉口)
- 四、修改交叉口
-
- [4.1 添加一条道路到锁定的交叉口](#4.1 添加一条道路到锁定的交叉口)
- [4.2 从锁定的交叉口移除道路](#4.2 从锁定的交叉口移除道路)
- [4.3 合并两个或多个交叉口](#4.3 合并两个或多个交叉口)
- 五、调整交叉口设置
-
- [5.1 调整默认停止位置](#5.1 调整默认停止位置)
- [5.2 更改默认停止位置的方向](#5.2 更改默认停止位置的方向)
- 六、锁定交叉口故障排除
- 七、总结
- 参考资料

引言
在自动驾驶技术的飞速发展下, 3 D 3D 3D 场景构建成为了模拟和测试自动驾驶系统的重要环节。 RoadRunner 作为一款功能强大的自动驾驶模拟 3 D 3D 3D 场景构建软件,为用户提供了丰富的工具和选项。
本篇博客介绍自动驾驶模拟 3 D 3D 3D 场景构建软件 RoadRunner 中的自定义交叉口工具,可通过此工具自定义创建各种形态的交叉口,从而满足不同场景的需求。通过掌握这一工具的使用,我们可以在自动驾驶模拟中更真实地还原现实世界的交通环境,构建自动驾驶场景环境,为后续导入 Carla 作准备。
一、功能说明
自定义交叉工具用于覆盖高级情况下的 RoadRunner 自动交叉口功能,可以创建不存在重叠的交叉口。
1.1 自动交叉口
- 由
RoadRunner自动创建的连接点称为自动交叉口,这些交叉口会根据需要自动创建、更新和删除。
1.2 锁定交叉口
- 由此工具手动创建的交汇点称为锁定交叉口,这些交叉口是手动创建的,必须手动删除。
有时需要将自动交叉口转换为锁定交叉口,以便向交叉口添加更多道路或更改默认停靠位置。
1.3 默认停靠位置
表示道路交叉口的起点或终点,这是新创建的机动道路自动停止的位置以及拐角开始的默认距离,默认停止位置的方向是从交叉口指向的,该方向用于确定哪些道路需要使用拐角连接。
在 RoadRunner 工具栏上,点击 Custom Junction Tool 按钮打开自定义交叉口工具:

下面具体演示此工具的具体功能。
二、创建交叉口
2.1 在不重叠的道路之间创建交叉口
- 点击
CustomJunctionTool按钮。 - 右键点击将成为交叉口一部分的每条道路的末端。
- 按空格键创建交叉口。
2.2 在两条平行道路之间创建交叉口
- 点击
CustomJunctionTool按钮。 - 右键点击一条道路上交叉口的起点,然后右键点击同一条道路上交叉口的终点。
- 右键点击另一条道路上的交叉口起点,然后右键点击同一条道路上的交叉口终点。
- 按空格键创建交叉口。如果角点显示不正确,请参阅 锁定交叉口故障排除 部分。
2.3 沿单条道路创建交叉口
沿单条道路创建交叉口对于创建独立的人行横道非常有用。要沿单条道路创建交叉口:
- 点击
CustomJunctionTool按钮。 - 右键点击交叉口起点和交叉口终点处的道路。如果要走人行横道,则交叉口的起点和终点大致对应于人行横道的每一侧。
- 按空格键创建交叉口。
- 如果要过人行横道:
- 点击
CrosswalkandStopLineTool按钮。 - 点击交界处的外侧。
- 右键点击交叉口的另一侧以创建人行横道。
- 点击
三、管理交叉口
3.1 移除锁定的交叉口
- 点击
Custom Junction Tool按钮。 - 点击所需的交叉口。
- 按删除。
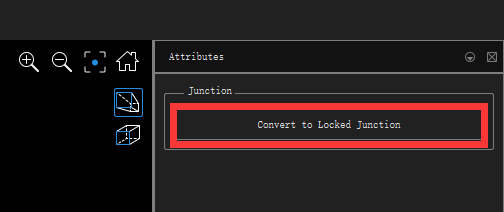
3.2 将自动交叉口转换为锁定交叉口
- 点击
CustomJunctionTool按钮。 - 点击所需的交叉口。
- 在
Attributes窗格中,点击ConverttoLockedJunction。
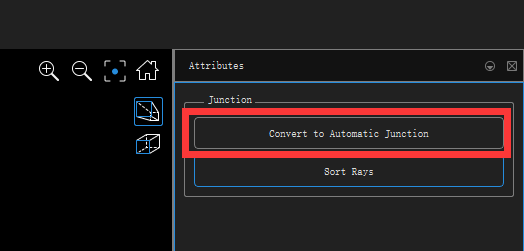
3.3 将锁定交叉口转换为自动交叉口
-
点击
CustomJunctionTool按钮。 -
点击所需的交叉口。
-
在
Attributes窗格中,点击ConverttoAutomaticJunction。
注意:锁定的交叉口并不总是可以转换为自动交叉口,如果不可能自动交叉口,则该交叉口将在转换过程中被删除。
四、修改交叉口
4.1 添加一条道路到锁定的交叉口
- 点击
CustomJunctionTool按钮。 - 右键点击道路末端以添加到交叉口。
- 右键点击交叉口。
- 按空格键添加道路。
4.2 从锁定的交叉口移除道路
- 点击
CustomJunctionTool按钮。 - 点击所需的交叉口。
- 点击要删除的道路的
DefaultStopline。 - 按删除。
4.3 合并两个或多个交叉口
- 点击
CustomJunctionTool按钮。 - 右键点击要合并的每个交叉口。
- 按空格键将交叉口合并在一起。
- 点击交叉口内侧任意多余的默认停车线,然后按删除。
五、调整交叉口设置
5.1 调整默认停止位置
- 点击
CustomJunctionTool按钮。 - 点击所需的交叉口。
- 如果交叉口是自动的,请将交叉口转换为锁定状态。
- 点击并拖动所需的停止位置。
5.2 更改默认停止位置的方向
- 点击
CustomJunctionTool按钮。 - 点击所需的交叉口。
- 点击所需的默认停止位置。
- 在
Attributes窗格中,点击FlipDirection。
六、锁定交叉口故障排除
RoadRunner 尝试根据指定的默认停靠位置来创建合理的锁定交叉口,但软件可能无法确定创建合理交叉口所需的角落。如果未正确计算锁定交叉口的角点,请执行以下几个步骤:
-
检查所有默认停靠点是否都从交叉口指向外侧。如果已在道路上手动放置默认停止位置,则初始方向可能会翻转。
-
检查默认停止位置是否距离太近。尝试将位置拖得更远,然后点击
SortRays以重新确定角落。 -
尝试使用多个较小的锁定交叉口而不是一个大的交叉口。必要时从交叉口移除道路。
-
尝试使用重叠而不是手动交叉口。
七、总结
本篇博客详细介绍了 RoadRunner 软件中自定义交叉口工具的强大功能。该工具不仅可以帮助我们创建不重叠的交叉口,还能实现自动交叉口与锁定交叉口的相互转换,以及交叉口的各种管理与调整操作。
掌握这一工具,对于在自动驾驶模拟场景构建中实现精确、多样化的交叉口设计具有重要意义。在实际应用中,可以根据不同的场景需求,灵活运用自定义交叉口工具,提高自动驾驶系统的适应性和可靠性。
参考资料
后记:
🌟 感谢您耐心阅读这篇关于 RoadRunner 自定义交叉口工具详解 的技术博客。 📚
🎯 如果您觉得这篇博客对您有所帮助,请不要吝啬您的点赞和评论 📢
🌟您的支持是我继续创作的动力。同时,别忘了收藏本篇博客 ,以便日后随时查阅。🚀
🚗 让我们一起期待更多的技术分享,共同探索移动机器人 的无限可能!💡
🎭感谢您的支持与关注,让我们一起在知识的海洋中砥砺前行 🚀