《智能的理论》全书转至目录****
不同AGI的研究路线对比简化版:《AGI(具身智能)路线对比》,欢迎各位参与讨论、批评或建议。
运动源于3个因素的交互作用:个体、任务和环境。运动动作由个体发起,个体产生动作是为了完成特定环境中的目标任务,同时运动动作又需满足任务类型的需求以及受到环境的制约。(Shumway-Cook 和Woollacott (著),刘浩等人(译),2021)
一.个体
对于个体而言,运动的产生依赖于大脑的不同组织,包括感知觉系统、认知系统和运动系统。本节只论述剩余的两点,知觉系统、认知系统(其他部分将在本章其他部分论述)。
1.知觉系统-感知觉(张英波和夏忠梁,2019)
运动控制中的感知觉包括外源性的视觉、听觉、触觉、嗅觉等,也包括内源性的平衡觉和躯体感觉等。其中,视觉输入信息占人类所有感官输入的80%左右,对运动控制有重要影响。
目前科学家认为。有两套基本独立的视觉系统影响着动作的控制过程:(a)中央凹视觉,专门负责确认物体;(b)外周视觉,负责控制动作。
(1)中央凹视觉
中央凹视觉由大量视锥细胞组成,视锥细胞只分布在中央凹区域,需要意识控制,负责识别动作的目标物体。
(2)外周视觉
外周视觉的主要成分是视杆细胞,占据全部视野(包括中央凹和外周),需要意识控制的程度很少。外周视觉的主要功能是利用光流(14-5:运动控制的生态学理论,光流信息指来自外界的光线在视网膜上留下的运动形式,它能使人感知到运动、位置和时机)和外周影像信息控制运动,具体的说,包括:
(a)维持身体平衡,视觉在维持身体平衡中也发挥着重要的作用。比如你站着面向前方时,当身体往不同方向晃动时眼睛会感知到不同的光流模式。另外,动作执行者盯住动作目标很重要,如高尔夫球运动员在挥杆时紧紧盯住球,能够帮助其更好地完成击球动作。这是因为头部任何微小的动作变化都可以被视觉流发现,进而下意识地产生对多余动作的反射性肌肉补偿,以调节动作维持头部稳定;
(b)提供与物体接触剩余时间的信息,通过不断接近的物体产生的视觉流(如飞来的球),大脑可以自动地判断它到达眼前的剩余时间(不断接近的物体在视网膜上的影像不断扩大);
(c)判断在环境中的速度(包括自身速度和物体速度)。比如,当速度越快,产生的光流越长;
(d)判断物体的位置或判断物体之间的位置,指向性运动(伸手抓握物体)离不开物体的位置信息。
2.知觉系统-感知觉与运动动作控制(刘向辉,2000)
(1)感知觉对运动计划编程的作用
在发起运动之前,神经系统就是根据机体内、外的各种感觉信息为运动动作编程。运动动作的形成,其本质是在大脑皮层的感觉区和运动区形成感觉痕迹。当运动动作再现时,大脑皮层就根据来自体内外的感觉输入信息,引出一定的感觉记忆痕迹,而运动控制系统会"自动"地"跟随"该感觉记忆痕迹而活动(特定的躯体运动轨迹有其对应的视觉输入、关节传感器输入等,而特定运动对应的这些感觉输入的配对记忆就是感觉记忆痕迹)。这种感觉记忆痕迹,是在运动技能的学习过程中,在感觉区和一般解释区中(长时记忆)记录下的各种运动动作体验。
有这样一个实验,先训练猴子掌握某一运动动作技能,然后切除不同部位的大脑皮层,当切除的是,运动皮层中与这一运动有关的那部分肌肉的对应皮质后,猴子可自由地利用其他肌肉代替麻痹了的肌肉来完成"习得"动作。但如果切除的是运动相应的躯体感觉皮层而保留运动皮层,猴子则完全丧失了原来"习得"的动作。这一实验证明了运动系统能自动地利用任何可用的肌肉来追随感觉痕迹。既如果控制某一肌肉的皮质损伤了,其他肌肉可自动代替,来追随相同的感觉痕迹。同时,躯体感觉皮层对完成某些类型的"习得"性运动动作是必需的,它能引导运动动作的进行,当相关躯体感觉皮质受到损伤,可能会失去该习得动作。
(2)感知觉对运动动作的反馈调节的作用
在运动的执行过程中,由于负荷改变和遇到意外障碍等外界因素,或由于运动程序不尽正确,使运动偏离预定感觉记忆痕迹时,神经系统可根据不断反馈至中枢的内外感知信息及时纠正偏差,实现"运动动作校正"。
3.知觉系统-感觉衰减(郑晓丹,2023)
运动系统和感觉系统存在十分密切的交互关系。由于外界环境和自发运动均能生成感觉输入,生物体内存在相应的神经机制来避免这种感觉输入源模糊不清所带来的危害(Crapse和Sommer,2008)。感觉衰减现象被认为与这一机制有关。感觉衰减是指,相比外界所产生的感觉事件,动物自身动作所产生的感觉事件会引发大脑更小的神经反应的现象(Schafer 和Marcus,1973)。前人研究在视觉、触觉、听觉领域均发现了感觉衰减现象。
(1)视觉
理论上当眼球在进行眼跳时,我们应当知觉到图像的运动。但现实并非如此,由于眼跳抑制的存在,我们在眼跳的过程中所知觉到的视野中的景物仍然是稳定的。眼跳抑制指的是在眼跳发生之前和发生期间我们的视知觉能力的下降,既眼跳会抑制视觉敏感度,减少视觉的输入(Ross,Morrone,Goldberg和Burr,2001)。
(2)触觉
相比外界因素导致的触觉刺激,我们自身动作导致的触觉刺激会引发更小的触觉。触觉衰减的一个典型例子是我们通常无法自己把自己挠痒。Blakemore,Wolpert和Frith(1998)的实验中采用了特定的触觉刺激产生装置,通过这一装置,被试左手接受的触觉刺激可能由被试自己的右手或者主试的动作来引发。研究者发现与主试动作的触觉刺激相比,被试自身导致的触觉刺激对躯体感觉皮层的激活程度更小。而当自身动作和触觉刺激不同时发生时(提前或延迟一定时间),感觉衰减程度比动作和触觉刺激同时发生时的衰减程度小。
(3)听觉
一个常见的感觉衰减现象是听觉M100/N100抑制,M100/N100指的是听觉刺激在大脑中引起的脑磁或脑电成分,该成分的潜伏期通常为100 ms,即在声音呈现后100 ms左右达到峰值。许多研究结果发现在人类说话期间大脑会自发抑制声音的M100信号(Aliu,Houde和Nagarajan,2009; Houde,Nagarajan,Sekihara和Merzenich,2002)。
在日常生活中,嘴部的运动通常会发出声音,比如说话声,咀嚼声等;手部的运动与声音有一定程度的关系,如按键盘或鼠标的声音,拍打桌子或敲门声;而眼睛的运动基本和声音没有关系。因此嘴巴、手部、眼睛这三类器官和声音的关联强度依次递减。Ford等人(Ford,Roach,Faustman和Mathalon,2007)让一组被试通过按键或者自己发出"ah"的声音,他们发现大脑对按键所诱发的听觉抑制程度要小于说话时对自己发出声音的听觉抑制。
(4)模型解释
关于感觉衰减的理论机制,目前影响较大的理论是前向模型,又称比较器模型。根据该模型,大脑会依据所要达到的目标状态发出相应的运动命令,个体根据运动命令实施运动行为,同时运动命令也会生成一个传出副本用以预测正在进行的动作的感觉结果,最后将实际感觉结果与预测结果进行比较。当大脑准确地预测了行为引起的感觉输入变化,这种精确的预测可以减弱自身行为的感觉结果,且增加外部感觉的相对突出性,产生衰减失效现象;相反,如果外部生成的感觉结果与传出副本不匹配,此时将会导致感觉衰减失效(Boehme和Olausson,2022;Klaffehn,Baess,Kunde和Pfister,2019)。
感觉衰减的程度会受到动作和感觉后果的匹配程度的影响,比如,当动作和相应的感觉后果之间引入一个干扰,感觉衰减会减少;当干扰非常大的情况下,感觉衰减现象甚至会消失(Aliu,Houde和Nagarajan,2009;Blakemore,Frith和Wolpert,1999)。研究者在对大鼠的研究中发现了类似的结果,在训练阶段,他们在大鼠每次进行某特定运动后发出特定频率的声音;在测试阶段,在大鼠运动后分别放出训练时的声音频率和训练时没出过的声音频率,发现后者比前者的抑制程度更低(Schneider, Sundararajan和Mooney,2018)。这些研究结果均表明,与匹配刺激相比,对于那些与动作不匹配的感觉刺激,动作引起的感觉衰减会更少。
(5)非动作预测线索下感觉衰减(巩家璇,2023)
越来越多的证据表明,在没有任何动作的情况下,当事件可以被预测时,也可观察到类似的衰减效应。例如,有研究发现,预测会导致与动作无关的知觉刺激的神经处理发生衰减。与未预测(Lange,2009)或错误预测(Hsu,Le Bars,Hǎmälainen和Waszak,2015)的音调相比,可从先前模式预测的音调的 N1信号频率降低。另外,当一对声音中的第二个声音刺激的特征与第一个声音刺激的特征相同时,能发现感觉衰减效应(Hsu,Hämalainen和Waszak,2014)。因此,感觉衰减似乎是一般预测机制的结果。
根据非动作预测线索下的感觉衰减现象,研究者提出了预测编码模型(18-9:预测心智)。该理论认为,知觉不是完全由刺激驱动的过程,而是自下而上的感知觉处理和自上而下的预测加工之间的相互作用。预测编码的目标是通过将先前的信念与感觉数据进行比较,得到预测误差,当输入的信息与预测相对应时,预测误差为0,皮层反应发生抑制,所有被预期的感觉刺激的反应都会减弱,此时感觉衰减现象较强;而当预测误差较大时,皮层反应也相应增大,感觉衰减现象较弱。
4.知觉系统-施动感
(1)定义
Gallagher(2000)将施动感定义为"我"是导致或产生某动作的人的感觉,因此又称为主动控制感。Haggard(2017)认为主体发出动作后会产生相应结果,并对外部世界带来一些变化,这些变化能够帮助动作主体认识到自己是动作发出者,同时给予动作主体产生一种控制感。因此Haggard将施动感定义为伴随特定运动出现,并产生相应结果的作为动作主体的体验。例如,我将打开书本,得到翻书的结果,在这个动作中,我获得打开书本以及"我"是打开书本的人的主观体验。
与施动感类似的一个概念是拥有感,它是指个体作为某一经历的体验者的感觉。在自主运动中,个体能同时体验施动感和拥有感。但是在非自主运动中,个体只能体验到拥有感而没有施动感,比如手臂被人移动时。(Gallagher,2000)
(2)模型
(a)比较器模型
施动感内在机制的早期理论是比较器模型。比较器模型强调施动感取决于运动控制系统内"预测状态"和"实际状态"的一致性(Frith,Blakemore和Wolpert,2000;Moore,2016)。
如图1,Frith等人(Frith,Blakemore和Wolpert,2000)认为在完成动作之后,个体会将系统的"实际状态"与先前形成的"预测状态"进行比较,若二者相匹配则产生施动感。他们假设人们的动作起源于目标,目标在运动控制系统中生成一种"理想状态"。控制器利用"理想状态"的信息产生某个运动指令。随后,这一运动指令将引发动作,并改变运动控制系统的初始状态。在个体收到感觉反馈信息后,基于这些信息对系统的新状态进行评估,确定系统的"实际状态"(即对控制系统状态的感知)。而后在"比较器1"中将"实际状态"和"理想状态"进行比较。如果二者失配,则产生一个新的运动指令。这一过程会持续到控制系统状态达成"理想状态"为止。然而,由于这种单一的比较机制对动作失误的纠错速度缓慢,个体可能会因此陷于危险,所以并不符合人类的适应性机制。通过在运动系统中加人预测性成分则可以避免这一问题。预测性成分是通过使用运动指令的"输出副本"来预测系统的未来状态。一方面,"比较器2"将系统的"预测状态"与"理想状态"进行比较,它允许个体在表现出错误动作之前迅速地调整运动指令。另一方面"比较器3"将系统的"预测状态"与"实际状态"进行比较,进而快速的纠正运动错误。另外,它决定了我们是否能够体验到施动感,"预测状态"与"实际状态"越匹配,施动感就越强烈。所以,预测性成分是比较器模型用以解释施动感的关键。上述的比较过程都是在无意识层面进行的,所以比较器模型仅解释了无意识低水平层面施动体验的产生机制。(田昊月,李力红,徐喆和李飞等人,2018)
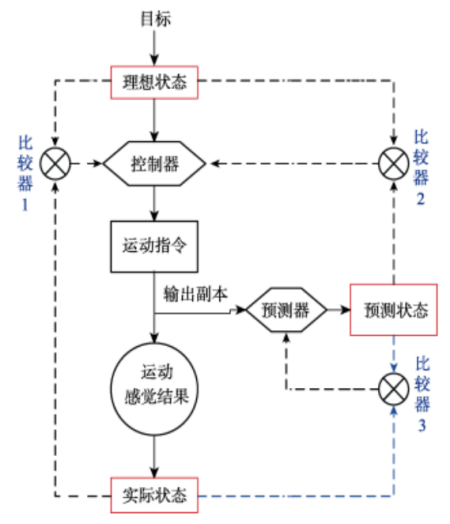
图1
比较器模型在比较过程中,预测和实际反馈之间的匹配容易受到感觉器官敏感度等影响,因此可能会存在一定的偏差。在视觉线索模糊的实验条件下,导致部分施动感存在错误。事实上,在轻微差异的情况下,改变的感觉反馈仍然可以被接受为一个人自身运动的感觉结果。例如,在一项基于手部运动视觉反馈的研究中,当动作偏离15°或者时间偏离150ms时,被试仍然认为是自己的动作(Shimada,Fukuda和Hiraki,2009;Synofzik,Vosgerau和Newen,2008a)。
Blakemore等人(Blakemore,Wolpert和Frith,2000)利用该理论解释感觉衰减。由于自主运动中个体可以预测其感觉结果,所以个体体验到的自己引发的知觉强度会低于外部刺激引发的,即出现感觉衰减的现象。
(b)多层模型(布宇博,2021)
Synofzik,Vosgerau和Newen(2008b)提出施动感的多层模型,该模型包含三个层次,包括施动体验、施动判断和施动元表征。这三个层次通过自下而上和自上而下通路互相影响。
施动体验类似于比较器模型,是低水平的内隐的施动感。它能够对运动和运动后的知觉进行整合形成联结,即将动作结果表征为自己的动作结果,建立动作-效果的归属自我性质,并成为一种稳定的表证。这种表征是逐渐形成的具有高度可塑性的(Synofzik,Vosgerau和Newen,2008a)。
施动体验只能够表征动作是由自己产生或不是由自己产生,但不能对动作是否由"某人"导致的作进一步归因(如果不是由自己产生的)。如果内部预测和反馈信息之间匹配一致,则不需要进一步的处理,而是通过对动作连续、协调的持续流程来体验施动感;相反,如果匹配不一致,我们可能会产生奇怪的感觉,即"我"没有完全完成动作的体验。比如,"我想打开门,我发出了开门的动作,门打开了",这时预测和反馈比较匹配(完成动作的体验),个体理所当然地(内隐的)"默认"自己是动作的执行者,而一般不会反思自己的动作;相反,如果"还没发出开门的动作,而门开了。或者发出开门动作但门没开",因为预测和反馈比较不匹配,个体就会体验到一种奇怪的不足以表征自己是动作发出者的感受。但在施动体验这一水平,个体不会进一步反思这种不匹配的原因。
施动判断是较高水平的施动感,具有外显性和反思性,它负责对行为及其结果进行合理化。简单点说,即将行为及其结果归因为具体的人或事(施动体验只能归因于是否自己产生的)。比如,当没发出开门的动作但门开了,施动体验仅能表征该动作效果不是自己产生的。但是施动判断会思考门到底是怎么打开的(如上一个人没关好门)。又比如,个体在考试前并没有努力复习,但取得了优异的成绩,他们会根据以往的经验等因素将成功归因于外在的运气或自己的能力。
施动元表征水平区别于前两者,它更加强调社会标准和社会规范的作用,即对于行为及其结果的归因要依据社会规范等准则进行判断。例如,"我知道我应该做X,不应该做Y,否则妈妈将会生气并对我感到失望"。它与施动判断的区别在于,施动判断并不具有这种社会标准和规范的特征,它不需要考虑自己或他人的特定心理表征,仅仅需要将某一动作归因为确定的主体,例如"这一结果是他的动作引起的"(而无需考虑这一动作是否遵从于某一规范标准)。
(3)施动感的测量
施动感的测量有两种方式。一种是外显测量,通过询问被试"这个动作是否就是你做的?"、"你对你的动作的控制程度如何?"等问题来实现。另外一种是内隐测量。主动动作的时间压缩效应就是代表性的内隐测量方式,时间压缩效应越强,施动感越强。(张淼,吴迪,李明和凌懿白等人,2018)
5.知觉系统-时间压缩效应
(1)定义
时间压缩效应是指主动动作到动作结果之间的时间间隔在主观上被压缩的现象。具体来说,对自主动作发生时间点的感知估计会向后偏移,对刺激发生时间点的感知估计会向前偏移,如图2。(Haggard,Clark和Kalogeras,2002)
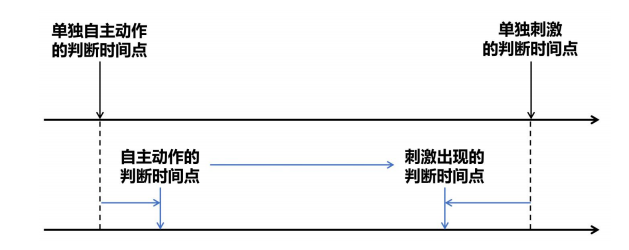
图2
(2)研究范式(黄昕杰,2021)
(a)Libet钟表范式(Haggard,Clark和Kalogeras,2002)
Libet钟表是外围刻有12个数字的表盘(5到60,以5为间隔),指针旋转一圈需要2560ms。
该范式分为基线阶段和操作阶段。
基线阶段分为两个任务,在单独动作的时间点感知任务中,要求被试在指针开始旋转一到两圈的时间内,进行随机地单击鼠标按键,按键后指针会继续转动1000ms。最后被试需要报告按键瞬间指针所在的时间点(Libet的刻度,范围为1~60)(如图3(a));在单独刺激的时间点感知任务中,要求被试静止地等待刺激的出现,刺激的出现时间是在指针开始旋转后一到两圈内随机的一个时间点,刺激消失后指针会继续转动1000ms。最后被试需要报告刺激出现的时间点(如图(b))。
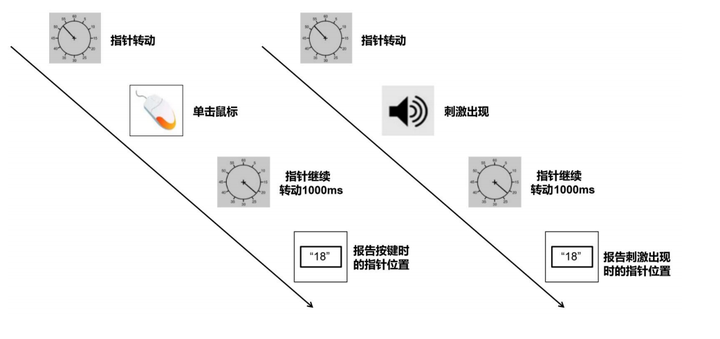
图3(a) 图3(b)
操作阶段也分为两个任务,在这两个任务中被试均需在指针开始旋转后的一到两圈内,随机地进行按键,刺激会在按键后的250ms后出现,随后指针继续转动1000ms。两个任务的不同之处在于,在自主动作的时间点感知任务中,被试只需要报告按键时的时间点(图4(a));而在动作结果的时间点感知任务中,被试只需要报告刺激出现的时间点(图4(b))。
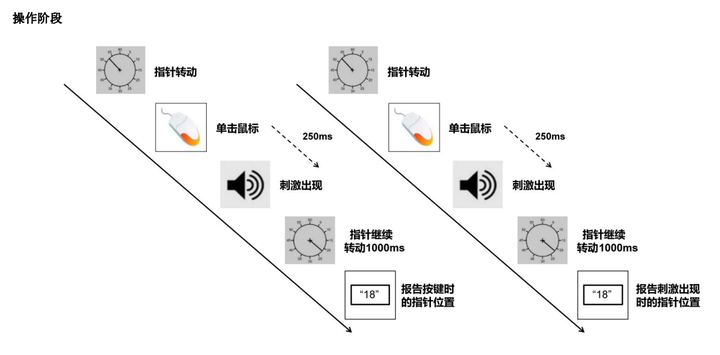
图4(a) 图4(b)
在该范式中,时间压缩效应的计算步骤如下:第一步,在基线阶段中,单独动作的时间感知误差=单独动作的报告时间-单独动作的实际时间,单独刺激的时间感知误差=单独刺激的报告时间-单独刺激的实际时间;第二步,在操作阶段中,自主动作的时间感知误差=自主动作的报告时间-自主动作的实际时间,动作结果的时间感知误差=动作结果的报告时间-动作结果的实际时间;第三步,自主动作的时间感知偏移=自主动作的时间感知误差-单独动作的时间感知误差,动作结果的时间感知偏移=动作结果的时间感知误差-单独刺激的时间感知误差;第四步,计算时间捆绑效应的值,时间捆绑效应的值=自主动作的时间感知偏移+动作结果的时间感知偏移,如图2。
(b)时距估计范式(Humphreys和Buehner,2009)
时距估计范式分为观察阶段和操作阶段。在观察阶段中,被试被要求静止地等待一个按键声音的出现,按键声音出现后的250ms会出现另一个刺激,随后被试需要估计按键声音到另一个刺激出现时的时间间隔(如图5(a));在操作阶段中,被试被要求自由随机地选择一个时间单击鼠标,单击鼠标后的250ms会出现另一个刺激。最后被试需要估计从按键到刺激出现时的时间间隔(如图(b))。如果操作阶段中的时间间隔估计显著少于观察阶段的,则意味着被试产生了时间捆绑效应。

图5(a)

图5(b)
(3)产生机制(吴迪,顾晶金,李明和张淼等人,2019)
施动感是主动动作过程中产生的控制自身动作进而控制外界事物和环境的一种主观感觉。可分为两种,一种是低水平的基于反馈的施动感(施动体验),另一种是高水平的基于因果关系的施动感(施动判断和施动元表征)。相应地,对主动动作的时间压缩效应的解释也被认为与这两种类型的施动感有关。一种观点认为,因为预期动作和实际动作匹配而产生了施动感从而造成了时间压缩效应;另一种观点认为,被试能觉察到动作和结果之间存在因果关系,是这种因果关系造成了主观时间的压缩。
(a)预期动作和实际动作的感觉反馈匹配
基于预期动作和实际动作的感觉反馈匹配的时间压缩效应有两个重要影响因素。第一个是主观意愿,有研究采用主动和被动按键的方式,结果表明相比主动按键,在被动按键条件下时间压缩效应消失了(Zhao,Hu,Qu和Cui等人,2016)。而在Haggard的一项研究中(Caspar,Christensen,Cleeremans和Haggard,2016),研究人员会通过指令胁迫或者不胁迫被试执行电击行为。结果表明,胁迫情况下的时间压缩效应会减小。研究人员认为,胁迫的情况下,被试的主观意愿下降,所以产生了更小的时间压缩效应。第二个是及时的感觉反馈。根据比较器模型,如果预期的知觉和实际感觉反馈结果匹配就会产生主动控制感。因此,及时的感觉反馈非常重要。Haggard等人(Haggard,Clark和Kalogeras,2002)发现,时间压缩效应会随着延迟的增加而减弱,并且超过650 ms时就会消失。
(b)因果关系
主动动作的时间压缩效应与因果关系有关。当动作的结果与动作发生相距4秒时,主动动作的时间压缩效应依然存在。这一结果不可能通过预期动作和实际动作的感觉反馈匹配来解释,因为动作与结果相距4秒时,预期需要的及时反馈和延迟的感觉反馈是不匹配的。此时,基于因果关系的施动感便能很好地解释这一现象(Buehner和Humphreys,2009)。在一项研究中,研究者在一种实验条件下要求被试主动按键,在另一种实验条件下使用机器手按键,并要求被试对动作和动作结果之间的时间进行估计。研究表明,机器手按键和主动按键条件都产生了时间压缩效应。这是因为,虽然机器手按键的反馈更少,但是机器手按键和动作结果之间存在着因果关系, 从而造成了时间压缩效应(Buehner,2012)。
基于因果关系的时间压缩效应主要体现在以下两方面:第一,时间上更加接近的两个事物更可能被知觉为原因和结果的关系,从而产生动作和结果之间的时间压缩效应。Haggard 等人(Haggard,Clark和Kalogeras,2002)将动作和结果之间的时间间隔设置为250、450和650 ms三种实验条件,结果发现在长时间间隔下,时间压缩效应降低。随着时间间隔的增加,动作结果之间的因果关系减弱,被试会认为动作结果并非是自己造成。第二,事件发生的概率也影响时间压缩效应。Engbert和Wohlschlager (2007)的结果表明与低概率(20%)条件相比,高概率(80%)条件能产生更大的时间压缩效应,同时也产生了更大的施动感。
(c)两种因素的关系
有两种观点可以用来解释上述两种因素之间的关系。第一,两种因素在时间上是先后发生的,构成两阶段序列关系模型,如图6。时间上的先后性导致在某个特定时间点前是预期动作和实际动作的感觉反馈匹配起主导作用,而在这个时间点后是因果关系起主导作用。根据以往的研究(吴迪等),延迟在200 ms内产生的时间压缩效应是预期动作和实际动作的感觉反馈匹配的结果,200-4000 ms内产生的时间压缩效应则是受动作和动作结果间因果关系的影响。
第二,基于匹配的和基于因果关系的是一种平行的关系,只是两者发生在不同的层面上对于时间压缩效应产生影响,前者是基于动作水平上的(非概念层面的、低水平的)压缩,而后者是基于观念水平上的(概念层面的、高水平的)压缩。
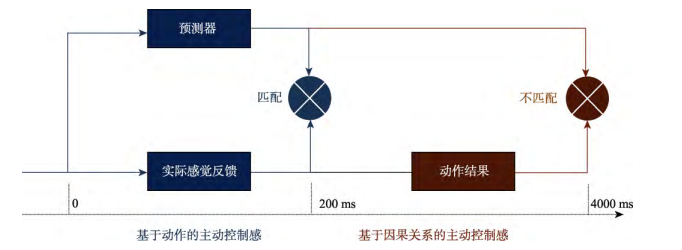
图6
6.认知系统-动作概念(赵金娜,2022)
(1)问题
动作概念是代表动作概念的符号或信号。动作概念既表现为外显的骨骼肌操作活动,又表现为内隐的思维操作活动。故而不同于其它自然科学概念,是一个特殊的概念范畴。首先,魏平(1997)曾对体校46名运动员做过调查,能漂亮的完成操作活动,几乎所有运动员都能较为准确的讲出自己的专项技术动作要领,但没有一人能正确回答它们符合哪些动作原理。而生物力学学者通过观察他人动作掌握概念,可以说出超越器械的原理特点,诸如充分拉长原动肌,增加初长度,延长最后用力的工作距离和人体或器械的作用时间,以达到增大冲量、提高人体起跳速度和器械出手速度,但对于亲身操作"做不出来"。因此,无论是上述专业运动员还是生物力学学者的动作概念结构都是缺失和不完整的。
(2)动作概念嵌套表征
基于此,欣果实(1997)认为,一个完整的动作概念结构表征应该是主体动作概念和客体动作概念共同构成。主体动作概念是指依靠本体感受器(15-4:身体感觉:本体感觉)提供的信息或经验所形成的以动作图式表征的动作概念系统,经过身体练习获得。客体动作概念是指依靠外周感受器(视觉、听觉触觉、嗅觉、味觉等)提供的信息或经验建立的易于用语义特征来表征的动作概念系统。在特定条件下,总体可能出现部分缺失,专业运动员通过学习只掌握了主体动作概念,但客体动作概念相对缺失。生物力学学者只掌握了客体动作概念,但无法完成动作操作,因此主体动作概念相对缺失。两者都不能完整的表征动作概念。
某种意义上说,主体动作概念更加丰富,客体动作概念只能从某个角度和方面以语义的形式反映主体动作概念,同时言语和文字存在一定的狭窄和局限性,只能无限接近主体动作概念。在运动技能学习中,大量的知识和经验是无法直接用语义的形式进行描述的。另外,客体动作概念对主体动作概念具有反作用,形成正确的客体动作概念对主体动作概念具有积极的指导作用。
7.认知系统-唤醒状态(张英波和夏忠梁,2019)
认知过程和知觉系统、动作系统有密切的联系,比如动作不会毫无目的的发生,而目的属于认知的部分。注意也是认知影响运动动作的重要因素,如下述的唤醒状态的"倒U"原理。
唤醒是由中枢神经系统产生的一种激活或兴奋水平。低水平的唤醒相当于睡眠状态,而高水平的唤醒比如在生命受到威胁时的激动和极度警觉状态。唤醒状态的"倒U"原理描述了唤醒水平和动作表现之间的关系。"倒 U"原理的表示如图7所示,坐标纵轴表示动作表现水平,横轴表示唤醒水平。当唤醒水平从"低"到"中"时,动作表现水平也随之提高。当唤醒水平达到一定程度时,既中等唤醒水平,动作表现水平最高。如果这时唤醒水平继续提高,动作表现水平开始下降。
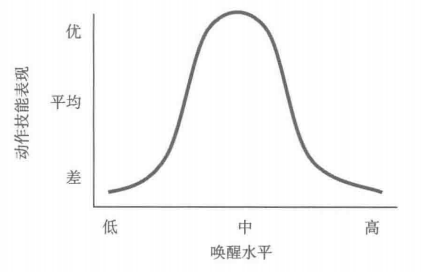
图7
(1)动作任务与"倒U"原理的关系
不同类型的运动任务,其"倒U"原理关系的中等唤醒程度不同,如图8。像演奏小提琴需要很大程度的精细动作(小肌肉群)控制和较高水平的认知要求,其中等唤醒程度对应的唤醒水平较低,即一般在唤醒水平较低时能够做出更好的动作表现,如左侧的曲线。可是随着对动作任务控制更加倾向于粗大动作(大肌肉群)和更低水平的认知要求(如打篮球和大强度举重),其中等唤醒程度对应的唤醒水平也随之升高,即成功的动作表现需要更高的唤醒水平,如中部和右侧的曲线。

图8
(2)利用提示假说
唤醒水平与感知范围有关(即一定时间内注意到的信息量),唤醒水平越高,感知范围越低,反之亦然。基于此,利用提示假说是对在低唤醒水平下和高唤醒水平下对动作表现水平降低的一种解释。该假说认为,在唤醒水平低时,感知范围相对比较大,人能够获得大量提示。可是,只有一部分提示是和动作任务有关的,动作执行者可能会接受一些无关提示(如在掷标枪比赛中,其他运动员的运动服和观众的喧哗),从而造成动作表现不理想。在唤醒水平升高的情况下,注意范围相对变得狭窄,集中在与动作任务关系最密切的提示上(如助跑和最后用力的紧密衔接做出迅猛的出手动作)。当越来越多与比赛动作任务无关的提示被排除,动作执行者只对有关的提示做出反应,结果是表现出最佳的动作水平。但是,当唤醒水平过度升高,出现感知狭窄,一些与动作任务有关的提示也被排除了,尤其是那些容易被忽略的提示(如助跑的起点离起掷弧距离偏近,造成脚踩在投掷区中外犯规,成绩无效),从而造成动作失败。根据利用提示假说,唤醒的适宜水平应该是,使注意范围足够"窄"地排除许多无关提示,同时还要足够"宽"地接受那些最重要的相关提示。
对于精细的运动控制,由于需要更多的感知觉信息以支持精细操作,唤醒水平需要适当的降低以吸收这些提示;而对于粗略的运动控制,需要的感知觉信息较少,唤醒水平需要升高以排除更多无关的其他提示。
注:感知狭窄
感知狭窄是人忽略一些类型的环境信息的倾向。感知狭窄发生于人唤醒水平提高时,知觉的注意范围变得狭窄。例如游泳,当初学者在岸上练习动作时,他的唤醒水平相对较低,能够同时对环境中的多项刺激信息进行处理。但当他在游泳池,或者更具威胁性的海洋中时,他的唤醒水平就会急剧升高,他的注意力也变得更加狭窄,焦虑感也变得强烈,结果是他只能感知更少的刺激。
8.认知系统-操作效应
(1)动作记忆
动作记忆是个体对自身已执行动作的记忆,即个体对一整天所经历的各项动作的回忆,如是否记得停车后按过车锁、出门之后是否锁过门、起床、穿衣、刷牙洗脸、打开电脑等。它强调身体的动作操作对动作的记忆的影响。需要区分的是,动作记忆和运动记忆。它们的具体区别表现为,运动记忆主要关注个体的各种运动技能的形成,如健美操、游泳、舞蹈等的学习;而动作记忆则是个体对自身经历的动作的记忆。(张馨元,2017;李广政,2015)
个体经历的每项动作都与周围的情境紧密相连,动作记忆在编码和提取的时候,常常以环境为线索进行展开,从而也能进一步说明动作记忆不是孤立的个体事件,而是由身体、世界和动作相互作用的系统事件,个体通过动作执行建立起沟通身体和外部世界的桥梁(Lagacé和Guérard,2015)。
(2)操作效应
(a)被试操作范式
Cohen(1989)首次提出动作记忆的经典研究范式------被试操作范式。该范式分为两种条件。在操作编码条件(或被试操作任务,EPT)下,实验者向被试以视觉或听觉的形式呈现一系列动名词短语(如敲桌子、拍皮球),要求被试看到或听到这些动名词短语后执行相应的操作任务。比如,由电脑呈现动名词短语"打开课本",短语呈现后,由主试向被试呈现相应的物体"课本",这时被试需要真实地打开课本,然后短语消失,主试将课本移出被试的视线。当操作任务完成后再对被试进行动名词短语的回忆或再认测验。在语词编码条件(语词任务,VT)下,实验者只给被试呈现动名词短语,告知被试尽可能地记忆所呈现的动作短语,但不需要被试进行操作,记忆完后同样进行名词短语的回忆或再认测验。实验结果发现,操作编码下的成绩要好于语词编码下的成绩,说明了动作操作对动作记忆起到一定的作用,该现象被称之为操作效应(Nilsson,2000)。
随着研究数量的增加,操作编码不再局限于对物体进行真实身体的操作,还扩展出了无身体动作的想象操作(如想象自己在翻书)、观察主试或他人的操作(如观察他人翻书)以及无物体但有身体动作的假装操作(如假装前面有一本书,并做出翻书的动作)。在这些不同类别的操作编码中,均发现操作效应。(刘子涵,2023)
(b)情景模拟实验法
被试操作范式所采用的是孤立、零散的动作短语,该类短语缺乏生活中活动的目的性、个体参与的动机、情感功能以及操作的成败等因素(Foley和Ratner,2001),因此不能良好地体现出我们日常生活中的动作特征。为使实验更具生态效度,满足日常活动的特性,部分研究者设计了一些情景性实验------情景模拟实验法(Foley和Ratner,1998;Steffens et al,2007)。
情景模拟法更接近于日常生活,是为了完成某个特定目标,所进行的一系列的动作,而非被试实验室法中单独的个别简单操作。例如,Steffens(2007)让被试模拟旅行时打包旅行物品的情景,在学习条件下,研究人员给被试真实地呈现一个大的旅行包、四个小包和一些与旅行相关的物体,让被试根据主试的录音提示分别在操作条件下(真实的打包行李)、观察他人操作条件下(看主试如何打包行李)和语词条件下(仅仅听如何打包行李)进行学习。随后在测试条件下,让被试回忆物体的名称并像学习条件一样将打包的东西重新再打包一遍,实验者记录被试打包的情况。结果发现,操作条件和观察他人操作条件下的成绩要好于语词条件下的。
(3)解释模型
(a)非策略加工理论
Cohen(1981;1989)考察了语词条件与操作条件下的系列记忆曲线(先后呈现若干个记忆项,并测试每个记忆项的成绩。系列记忆曲线为以横坐标为记忆项的先后顺序,纵坐标为记忆项的成绩所绘制出来的记忆曲线),发现语词条件下自由回忆的系列记忆成绩拥有典型的"U"型曲线特征(同时拥有首因效应和近因效应(20-3:长时记忆)),而操作条件下自由回忆的系列记忆曲线缺乏首因效应但拥有近因效应(呈现正比的特征)。缺乏首因效应常常被看作个体在学习时未使用记忆策略(如复述或加强注意),而事后对被试进行访问发现,操作条件下被试只是在学习时执行相应的动作,而未主动使用记忆策略。因此,研究认为操作条件下的编码是非策略性编码的,且是相对自动的加工过程。根据Cohen的观点,记忆在自动加工-控制加工维度上是一个连续体,动作记忆和言语记忆代表了这个连续体的两个端点(动作记忆对应自动加工,言语记忆对应控制加工)。
(b)多通道观点
多通道观点认为,操作效应是由两方面的原因造成的。首先,语词任务一般都是以单通道(视觉或听觉)或双通道的形式呈现,而动作操作则一般是多通道的。在操作任务中,除了视觉和听觉通道以外,在操作过程中被激活的还有触觉通道,甚至在某些操作任务(如吃饼干和闻香水等)中,味觉通道和嗅觉通道也被激活。其次,比起词组记忆,在每一通道中,动作操作包含更为丰富的信息。除了文字指令中的语言属性之外,还有和操作任务中个别对象相关的颜色、重量、形状、质地等信息。相比而言,语词任务中的语言材料只包含语义、语音、字形等属性。(罗琳,2001)
(c)多重记忆系统
Engelkamp和Zimmer(2002)认为除了概念系统、语词词汇系统和非语词的视觉(表象)输入系统,还应存在非语词的动作输出系统。研究认为对于特定的刺激类型会自动激活相应的加工系统,如语词呈现的"课本"这一词语会自动激活语词词汇系统,视觉呈现的"课本"图片会自动激活非语词的视觉(表象)输入系统,而"打开课本"这一动作执行则会自动激活非语词的动作输出系统。
(d)情节性整合说
Kormi-Nouri(1995)提出的情节性整合说认为,整合包含语义整合和情景整合两种类型:语义整合关心的是实验材料中的动词和名词的整合,形成语义记忆。而情景整合则是实验者的动作执行过程所带来的整合,形成情节记忆。操作编码条件是对动词(动作)与名词(动作对象)的情景整合,将动作和对象两部分被编码为相互紧密联系的记忆单元。相对的,语词编码下因为缺少了操作过程,进行的是语义整合,动作与对象之间的整合程度相对较低,这两部分之间的联系也就较不紧密。
二.任务(张英波和夏忠梁,2019;Shumway-Cook 和Woollacott (著),刘浩等人(译),2021)
日常生活中数量繁多的任务需要相对应的动作策略,而所执行的运动种类会对运动的神经控制产生重大影响。
1.不同类型的运动分类法
运动可以按照不同维度进行分类:
(a)间断型vs连续型
间断型运动任务有明确的起止标志,例如"踢球"动作的起止分别是脚触碰到球的前一刻和球离开脚的那一刻,"坐下"动作的起止分别是"站"的状态和"坐"的状态。连续型运动任务的起止并不是这个任务的固有属性,它的起止由执行人随意决定,例如步行或者跑步。
(b)开放式vs闭合式
开放式运动任务指运动所在的环境是不断变化且难以预料的,如打壁球或打乒乓球。这类任务有赖于对感觉输入的持续监控,且监控信息也会被实时更新和微调,以控制运动输出。相反,闭合式运动任务则发生在一个相对较为稳定或可预测的环境,并且较少依赖实时且持续的监控信息,如睡和坐。
(c)稳定性vs活动性
稳定性运动任务是指不移动的任务,例如坐或站;而活动性运动任务是指发生移动的任务,如走和跑。
(d)手部操作型vs非手部操作型
手部操作型任务包括任何手部操作;非手部操作型则最多仅有下肢运动。
正如客体是由多种不同维度的特征组成(如苹果的颜色维度、形状维度、味道维度等),动作也如是。任何运动都是各种任务维度的结合,如坐或站是闭合式且稳定性的,在平面行走是闭合式和活动性的,在崎岖的路面行走则是开放式且活动性的...。
2.意图对动作的影响
面对多种目标物品,日常生活中一种物品往往存在多种用途,即个体伸出手臂抓握同一物体也可以基于不同的意图。研究人员通过让目标物体保持恒定,被试基于不同的意图伸出手臂进行抓握,发现伸出手臂进行抓握这一动作非常容易受到动作意图的影响。
Ansuini等人(Ansuini,Santello,Massaccesi和Castiello,2006)让被试在三种条件下伸出手臂抓握同一物体,第一种情况仅仅是抓起这个物体;第二种情况是将这个物体抓起并放到一个和目标物体差不多的大的壁龛中;第三种情况是将这个物体拿起放到一个比物体本身大很多的壁龛中。虽然所抓的物体是同一个,其目标物体的物理属性是一致的,手部在接触物体时的姿态并未存在显著的不同。但是研究人员发现,被试伸出手掌的速度在需要精确放置的情况下减慢了;而无名指与小指在放到较大的壁龛过程中,在伸出动作的前30%的时间更为伸展,并在剩余的的伸出动作中更为屈曲。
3.Fitts定律(动作速度-准确性的关系)
动作速度-准确性的相互关系是人体动作表现最基本的原则之一。心理学家Fitts发现动作速度和准确性存在相互制约的关系。他在实验中要求受试者用铁笔在宽度为W、间距为A的两个目标钢板上快速点击,手从目标钢板中间的原点按钮出发,并不断快速重复地点击两个钢板。实验通过变化钢板宽度W和间距A的大小来控制实验难度,如图9所示。
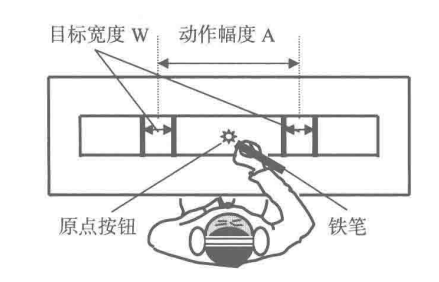
图9
他根据该实验的结果,首次提出了关于动作速度和准确性的数学原理,并且发现了动作时间与动作难度指数之间具有线性关系,用数学公式表示为:
MT=a+blog2(A/W)
其中,MT为动作时间,a和b为常数,A为动作幅度,W为目标(钢板)宽度。这个原理后来被人们称为Fitts定律。该定律指出,在既快又准的动作中存在一个对"速度-准确性"的权衡,人在执行动作时要么保证动作准确性而牺牲速度,有理由相信,较慢的动作会更加准确,至少动作执行者有更多时间发现错误并进行纠正;要么保证动作速度而牺牲准确性,这取决于动作任务的要求。
为什么快速动作的速度会与准确性互相影响?这是因为动作在中枢神经系统的处理过程中存在一定的"噪声"。这些噪声包括各个肌肉产生力量的不一致性(每个肌肉带动肢体的运动方向不同,并且每个肌肉在运动中存在异变性(14-4:协同控制))、M1和M2反应对肌肉收缩造成的额外变化、重力等因素。另外,由于快速动作都是以开环控制或者动作程序控制的,几乎没有反馈,无法通过反馈调整噪声带来的误差。这两方面共同造成动作速度-准确性的权衡关系。
4.空间位置运动与身体模式运动
Smyth等人(Smyth,Pearson和Pendleton,1988)依据运动目的的不同将肢体运动分为空间位置运动与身体模式运动。对于空间位置运动(比如拿起一支笔)而言,指向外部空间中的目标位置是其目的;对于身体模式运动而言(例如芭蕾舞姿势),变换身体构型是其目的。另外,空间位置运动可由多组不同的效应器执行,例如你可以用手推门,也可以用脚推门;而身体模式运动只能用特定的身体部位产生运动,如芭蕾姿势中不能通过移动脚来耸肩。
5.Simon效应(吴可慧,2014)
(1)基本概念
刺激-反应的兼容性,既刺激和它所引起的反应以"自然"方式结合的程度。如用右手接住朝身体右侧飞来的球,或者面向学生的老师用和学生方向相反的身体动作带体操(镜像动作),便于学生模仿,这些都是刺激-反应兼容的例子。相比不兼容的情况,当刺激和反应兼容时其动作反应速度更快。在图10的例子中,情况甲中的刺激和反应是兼容的,因为左侧的灯光刺激由左手的按键控制,右侧的灯光刺激由右手的按键控制,这也被称为利手性。而在情况乙中刺激和反应之间的关系就不十分自然,或不兼容。相比情况乙,情况甲的反应速度更快。(张英波和夏忠梁,2019)
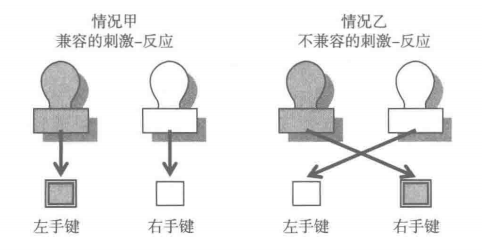
图10
Simon效应正是刺激-反应兼容性效应下的范例,是指当,相比不一致时,与任务无关的刺激空间位置与正确反应的空间位置一致时,被试的反应绩效更优的现象。研究者通过耳机向被试呈现"left"或"right"的音频信号,要求被试听到left时按左键;听到right时则按右键,而忽视刺激的来源方向(声音从左边耳机或者右边耳机发出)。结果发现,被试无意识的受到刺激来源位置的影响(刺激来源位置与任务无关)。当来源方向和反应方向一致时,被试的反应时更短,正确率更高(Simon和Rudell,1967)。
(2)模型
(a)编码模型
Fitts是最先用编码的观点来解释刺激-反应的兼容性效应,他认为在刺激-反应的兼容性效应中,刺激和反应之间存在编码的相似性,这些相似性促进了与之特征维度一致的行为,并阻碍了不一致行为的产生,使得反应时之间存在差异(Fitts,1954)。Wallace等也提出,Simon效应产生的关键正是在于刺激和反应被编码之后的空间坐标相似性,如果二者是一致的,那么反应就会加快并更准确(Wallace,1972)。
(b)双线路模型
双线路模型认为,人的执行系统有两条功能不同的加工通路,直接通路和间接通路。在直接通路下,视觉刺激的呈现会自动快速地激活与刺激空间位置对应的反应,不需要意识的控制;在间接通路下,正确反应的产生建立在指导语基础上,是被有意识选择的,这条通路负责与目标相关维度的加工(如语义)。对于Simon效应而言,当刺激呈现的空间位置和反应位置一致时,两条通路汇合并易化反应,反之不对应时会导致冲突,延长反应时(Vallesi,Mapelli,Schiff和Amodio等人,2005)。
(c)维度重叠理论
维度重叠理论由Kornblum等(Kornblum,Hasbroucq和Osman,1990)提出,认为当刺激和反应间存在相似性时,如果刺激的空间维度与反应的空间维度一致时,Simon效应就会出现;如果刺激或反应的编码特征中不暗含任何空间维度,或反应和刺激的空间特征不存在加工重合,Simon效应就不会出现。在一项实验中,两名被试各负责一个方向的反应(如一个负责左侧按键,另一个负责右键),当增加两名被试之间的距离至一臂之外,被试所能感受到自己的反应空间维度性降低(左侧或者右侧),Simon效应就会消失(Guagnano,Rusconi和Umiltà,2010)。
Hommel(1993)认为对于任务无关的刺激属性加工会立即自动化展开,但会之后随着时间迅速衰退。因此,当刺激呈现时,其空间属性会被自动化激活,并随后迅速衰退。
(3)Simon效应的反转
Simon任务下当刺激和反应间存在多种维度的匹配时,可能会导致Simon效应的反转现象。Hedge和Marsh(1975)发现,当他们将左右两按键涂上颜色时(如红色左键,绿色右键),要求被试根据刺激的颜色(刺激同是红色或者绿色)做颜色鉴别任务(如刺激为红色时按红色键,或刺激为红色时按绿色键)。这时,刺激颜色与反应颜色存在兼容性,分为颜色兼容,如当刺激为红色时,反应是按红色键;和颜色不兼容,如当刺激为红色时,反应是按绿色键。另外,刺激可以出现在左边或者右边,分为空间兼容,如刺激在左边,目标按键在左边;和空间不兼容,如刺激在左边,目标按键在右边。在该任务中,颜色维度是任务相关维度,而空间维度是任务不相关维度。结果发现,当任务相关维度和任务不相关维度同为兼容或不兼容时,其反应速度要高于其中一个维度兼容而另外一个不兼容的反应速度。即两个维度都不兼容的反应速度要高于其中一个兼容的反应速度,出现Simon效应的反转。
针对Simon效应的反转现象,逻辑再编码理论(Hedge和Marsh,1975;宋晓蕾,2007)认为这类实验存在两种反应规则,确认规则和逆规则。当刺激维度与反应兼容时,采用确认规则;而当刺激维度与反应不兼容时,采用逆规则。且每种维度都拥有自己的反应规则。例如,在上述实验中,对于任务相关维度,刺激为红色,反应是红色按键,这时被试采用确认规则;相反,刺激为红色,反应是绿色按键,这时被试采用逆规则;同理,对于任务不相干维度,刺激在左边,反应按键在左边,这时被试采用确定规则;相反,...。相比逆规则,确认规则的反应速度更快,因此解释了Simon效应;另外,相比采用不同规则(一个维度采用确认规则,一个维度采用逆规则),任务相关维度和任务不相关维度采用的是同一种规则(同采用确认规则或逆规则)的反应速度更快,因此解释了Simon效应的反转现象。另外,De Jong(1994)认为,任务不相关维度(空间)的反应规则首先被自动的、快速的无意识通路加工,但该通路的加工过程不能维持较长时间,会迅速衰退;而任务相关维度的反应规则则由较慢且基本由意识所控制的通路加工,该加工路径的结果可以应用(覆盖)于任务不相关的无意识通路中。
三.环境(Shumway-Cook 和Woollacott (著),刘浩等人(译),2021)
1.环境属性
影响运动的环境属性被分为调节性和非调节性因素(Gordon,1987)。调节性因素指环境中塑造或影响运动动作的因素,其例子包括即将拿起的杯子的尺寸、形状和行走时支撑面的种类(平整的路面或者崎岖的路面)。而环境中的非调节性因素可能会影响运动表现,但是运动本身并不会因这些因素而改变,例如所处环境的噪声或引起分心的其他因素。
2.社会情境对动作的影响
动作有指向物体的,也有指向其他个体的。在动作的执行过程中,有的动作是被试自己执行的,有的动作则具有社会属性和交流的功能。那么社会情境中组织与执行对动作会带来怎么样的影响呢?
合作与竞争是社会互动中常见的两种模式。对于每一个执行者,动作的组织取决于另一方的状态,因为在合作情境中适用的动作模式可能会导致执行者在竞争情境中失败。沿着这一思路,研究人员分析了四种情况下伸出手臂抓握木盒这一动作的运动学信息。在放松状态中被试伸手,抓握物体,将物体放置在一个指定位置;在快速状态中被试执行同样的动作,但需要尽快进行并完成伸出手臂抓握木块的动作。在合作状态下,被试将木块放置到另一位被试放置的木块上方(位置与在放松状态中的位置一致)。在竞争状态下,被试要让自己的木块相比于对方先放置到指定位置。研究发现在他人存在时的动作组织并不同于自己单独执行时,即除了速度上的差别,动作的细节也存在不同。并且在合作任务中,双方动作运动学信息出现了一定程度的相似性(Georgiou,Becchio,Glover和Castiello,2007)。
在上述研究中,双方的态度(合作或竞争)总是一致的,并且可以在动作开始之前就确定所处的社会情境。但是现实世界中,情况复杂的多,接下来我们来看当双方对于动作的态度不一致时会发生什么。被试们接受指导语,并按照要求以合作或竞争的状态去伸手抓握物体,但是坐在对侧的实际上是一位实验助手。在一致的状态下。这位助手自己的状态(面部表情、身体姿态)都与指导语一致,并完成自己的该进行的动作。但是在不一致条件下,这位同谋将不完成指导语的动作,在合作条件下进行竞争性的动作,在竞争条件下进行合作性的动作。实验结果显示,被试执行动作的运动学信息明显受到对方的影响。当对方与自己不一致时,自己的动作会变得更像对方的动作(Becchio,Sartori,Bulgheroni和Castiello,2008b)。这个研究显示在面对面互动时,对方实际体现出的状态影响了被试执行动作的方式,双方在无意识的在动态中协调动作。