1 安装软件与数据准备


2 新建项目
选择项目名称与创建路径。

3 添加影像
可以选择添加图像或者路径。

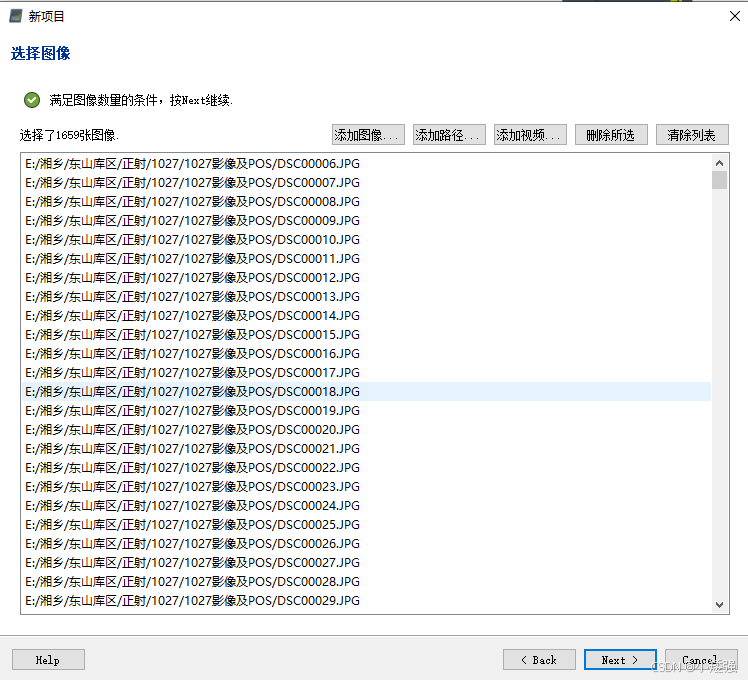
3.1 这里以路径为例,选择影像路径。
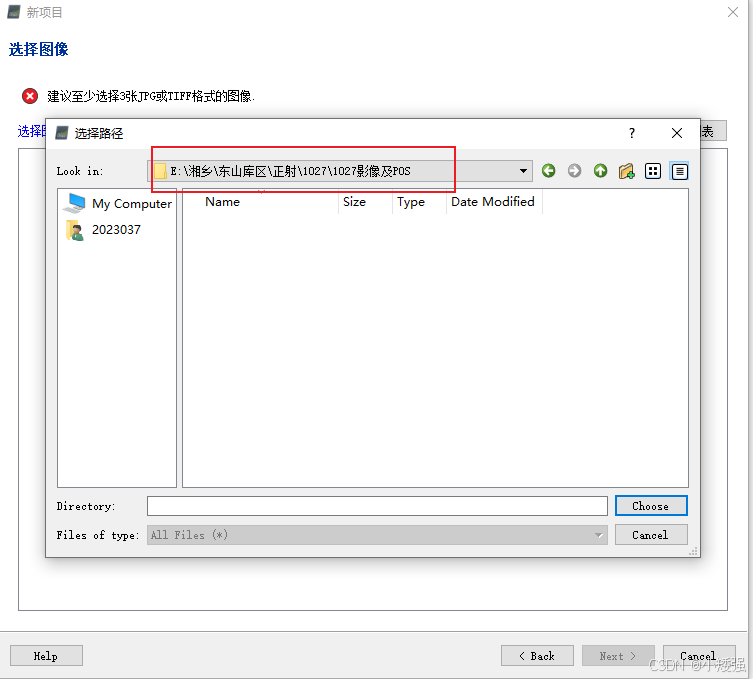
3.2 点击下一步
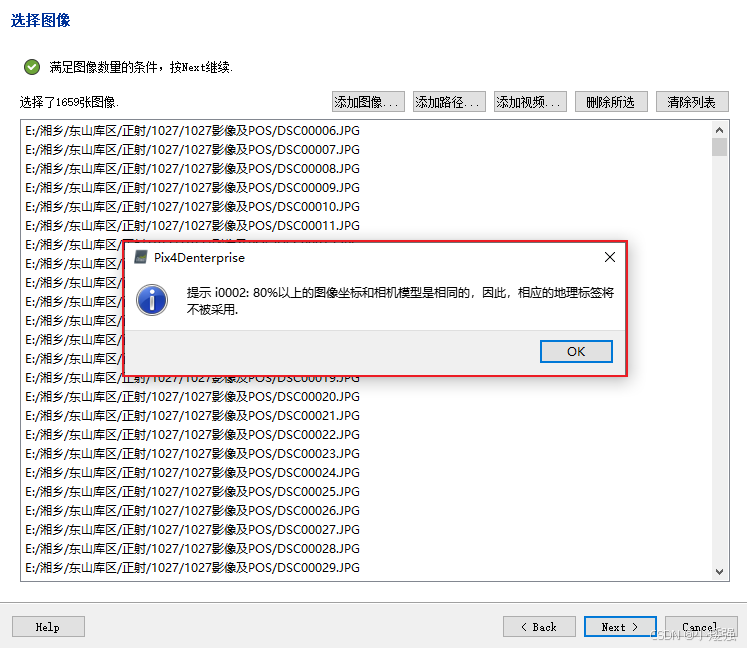
3.3 因为这次是使用飞马飞机飞的,影像的pos需要手动匹配;而大疆飞机的影像能够自动匹配到pos信息。点击ok进入下一步。
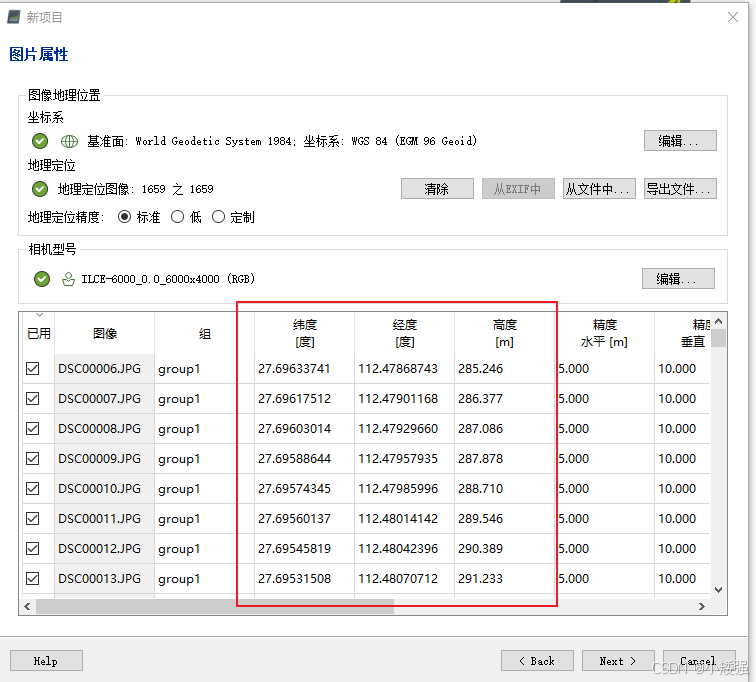
3.4 点击地理定位中从文件中选择pos数据。
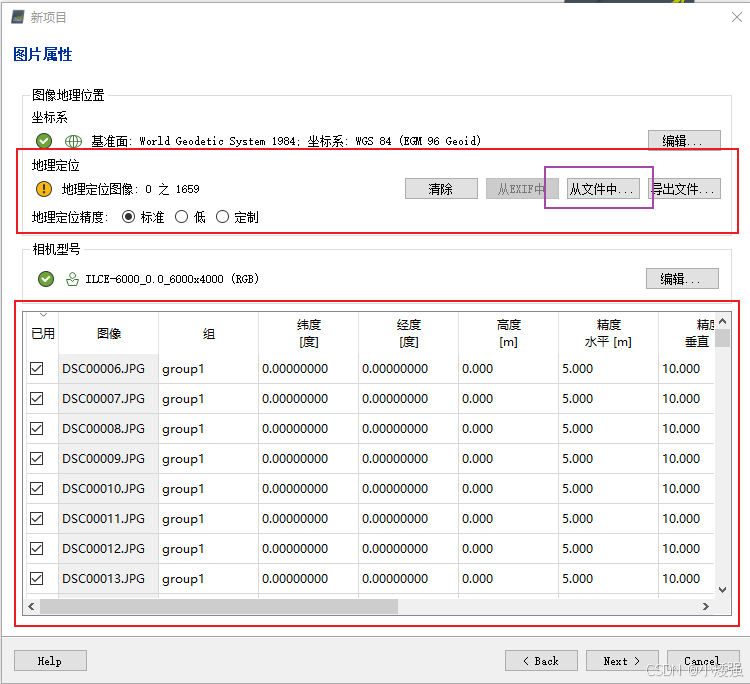
3.5 选择文件格式以及数据文件,点击ok。



3.6 确认经纬度是否匹配有错误,无误后点击下一步。
4 选择坐标系。
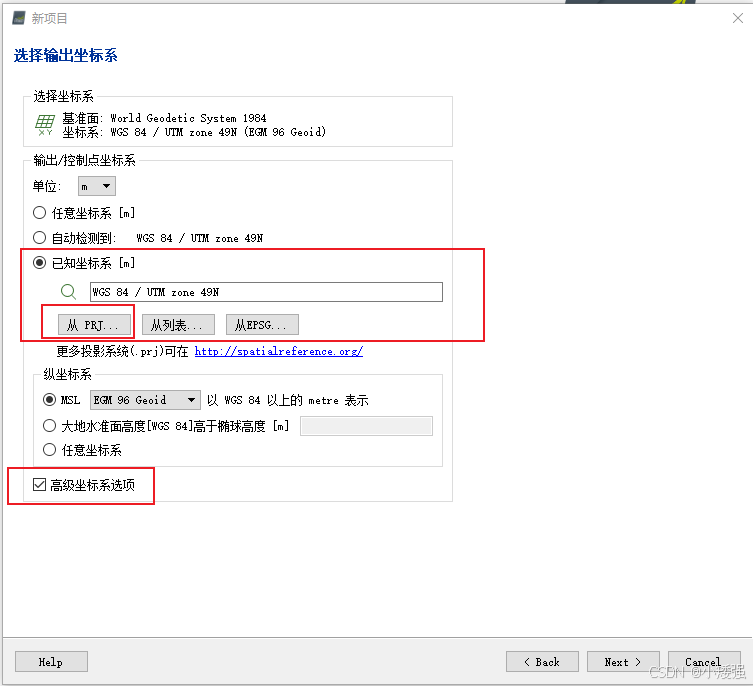
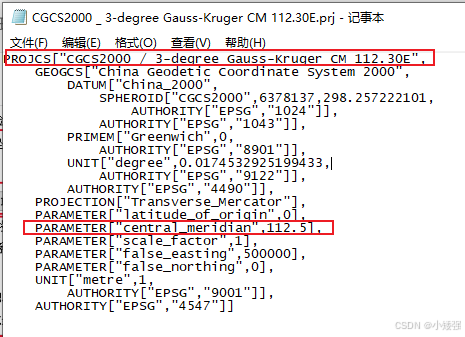
4.1 本次项目是2000-112度30分,在预设里面没有,需要新建一个PRJ文件,其他地方相同,主要修改投影中央子午线数值,为十进制,这里是112.5。
4.2 选择新建的prj文件,点击下一步。


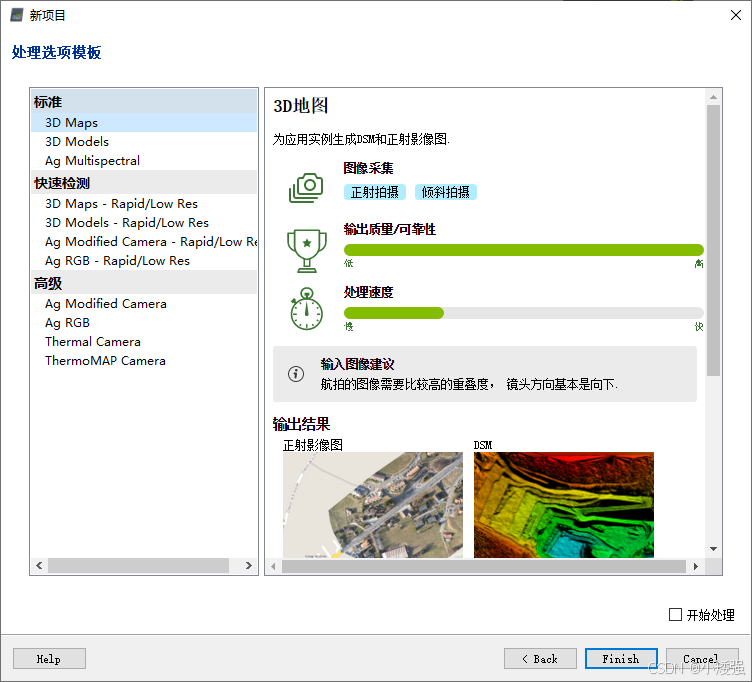
5 选择3D Maps,点击finish。
6 初始化处理。
只勾选1,2和3不勾选。

点击开始,等待处理完成,再进入下一步。

6.1 查看处理报告
需要这四个通过,为绿色。

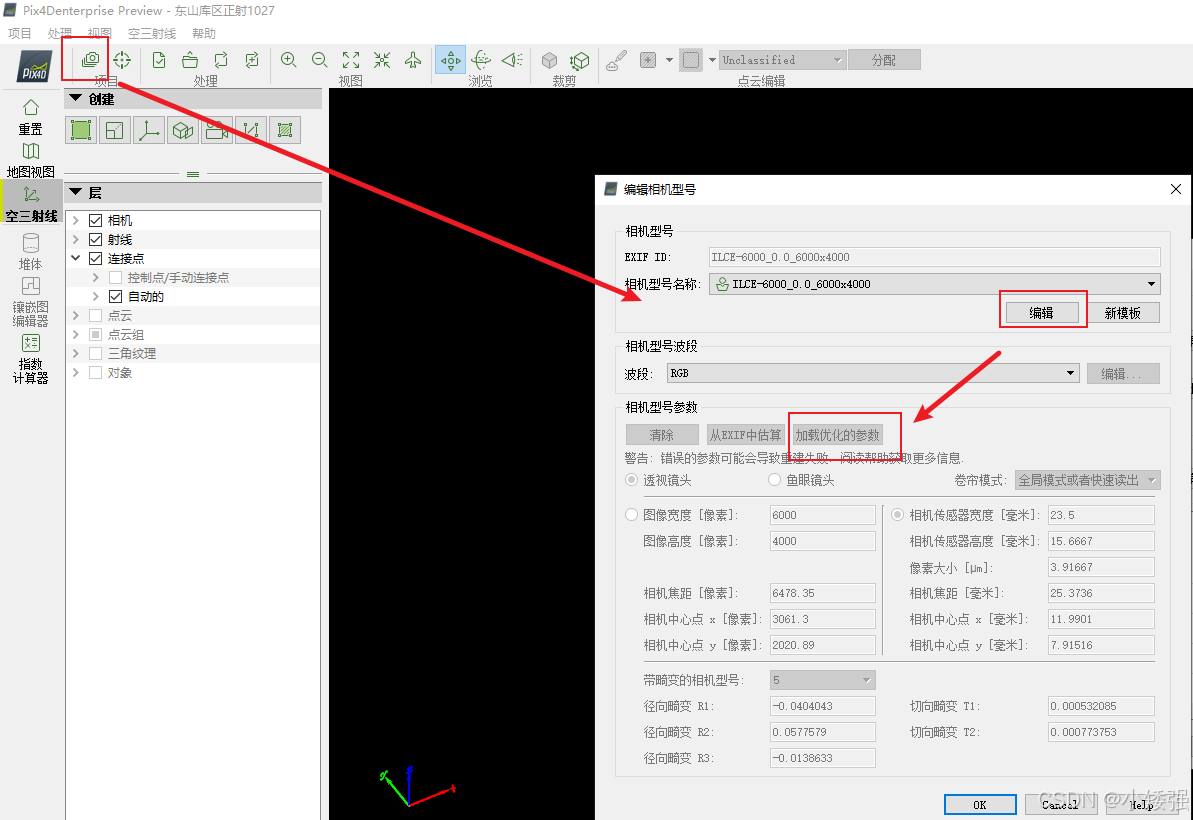
6.2 有时这个相机参数会不通过。
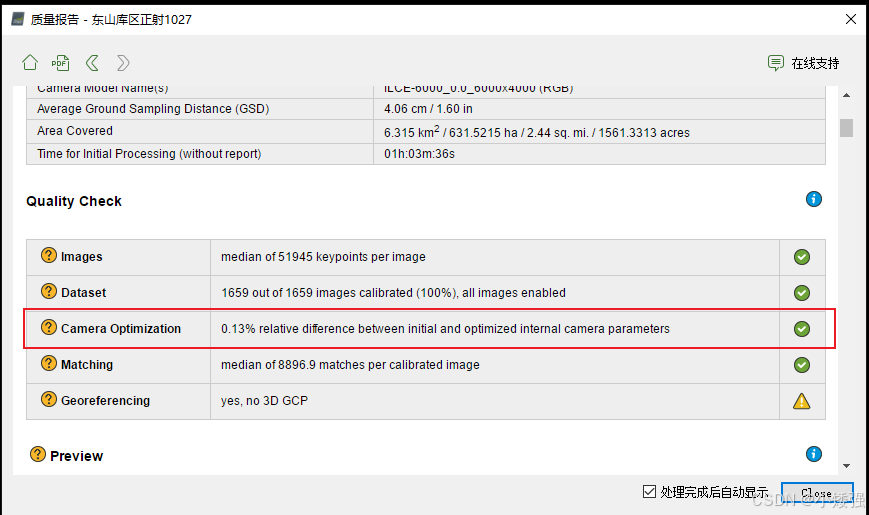
加载优化相机参数再跑一次。
7 空三处理
7.1 导入像控点,选择正确的数据格式X、Y、Z。
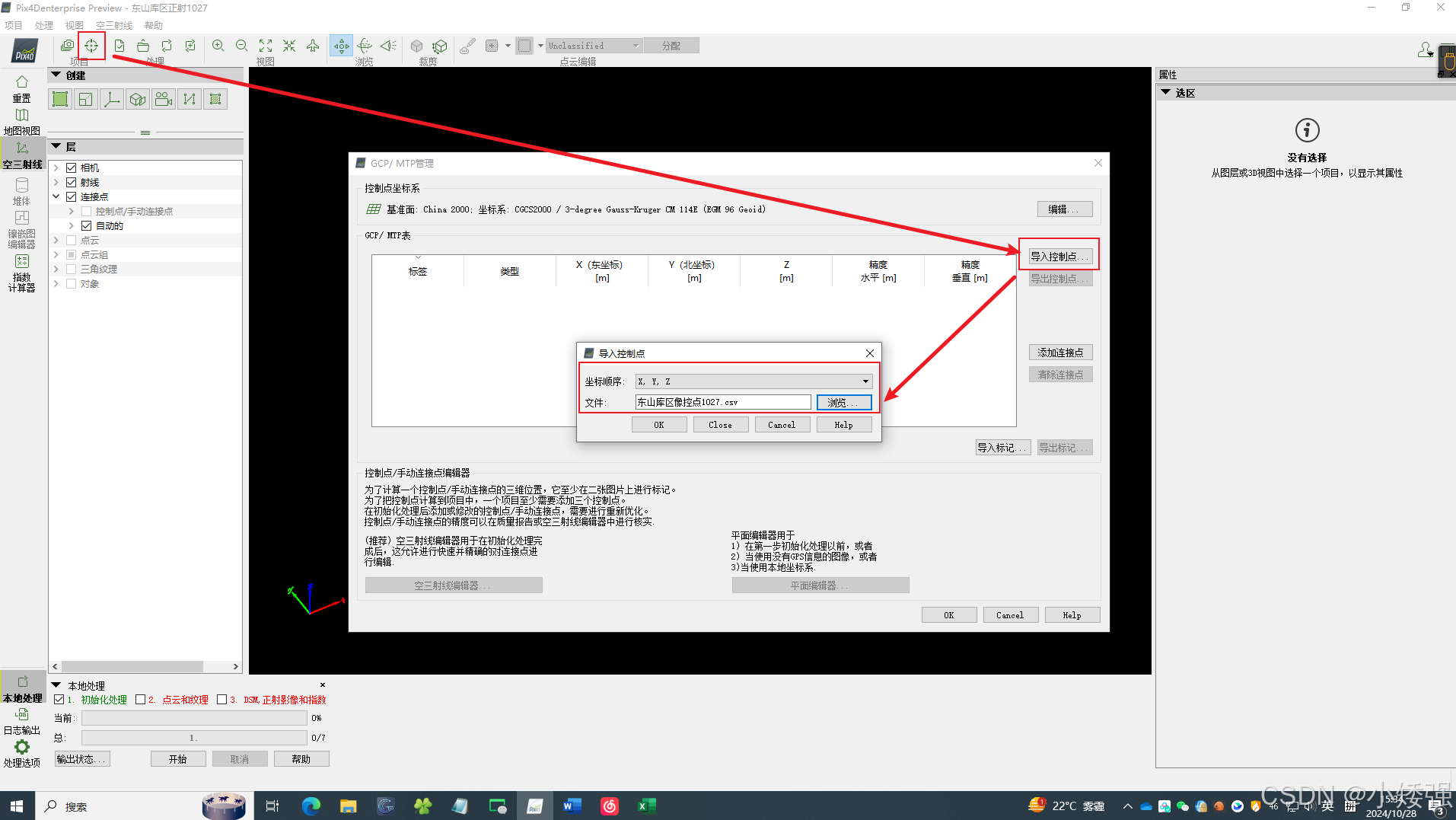
点击ok(这里x、y反了)。

注意:有时控制点坐标系需要手动修改,在编辑过程中,需要手动选择prj文件,像前面一样操作,发现识别不了,需要采用如下格式,才正常识别出来。


正常情况下界面。

7.2 删除掉多余的控制点。


7.3 刺点。
双击控制点,即可出现它匹配的图像,一个点尽量刺7个及以上影像。具体可见这条视频说明。

刺了两三个点之后,点击使用,可以自动进行匹配,有利于后面的刺点。不要用自动标记。

8 生成正射影像与DSM。
勾上1和3,再跑一次,生成正射影像与DSM。

9 查看生成报告。
做好是5个都是绿色,这是Dataset显示黄色,发现是边缘的影像不行,对于需要的中部地区影像没有影像可以不进行处理。其次,查看R的指标数值以及像控点的误差,一般都小于1,很小。

最终需要的成果在这两个文件夹内:DSM和DOM。
