🚀write in front🚀
🔎大家好,我是黄桃罐头,希望你看完之后,能对你有所帮助,不足请指正!共同学习交流
🎁欢迎各位→点赞👍 + 收藏⭐️ + 留言📝
💬本系列哔哩哔哩江科大STM32的视频为主以及自己的总结梳理📚
🚀Projeet source code🚀
💾工程代码放在了本人的Gitee仓库:iPickCan (iPickCan) - Gitee.com
引用:
STM32入门教程-2023版 细致讲解 中文字幕_哔哩哔哩_bilibili
Keil5 MDK版 下载与安装教程(STM32单片机编程软件)_mdk528-CSDN博客
STM32之Keil5 MDK的安装与下载_keil5下载程序到单片机stm32-CSDN博客
0. 江协科技/江科大-STM32入门教程-各章节详细笔记-查阅传送门-STM32标准库开发_江协科技stm32笔记-CSDN博客
【STM32】江科大STM32学习笔记汇总(已完结)_stm32江科大笔记-CSDN博客
江科大STM32学习笔记(上)_stm32博客-CSDN博客
STM32学习笔记一(基于标准库学习)_电平输出推免-CSDN博客
术语:
|--------------------------------------|---------------------------------------------|
| 英文缩写 | 描述 |
| GPIO:General Purpose Input Onuput | 通用输入输出 |
| AFIO:Alternate Function Input Output | 复用输入输出 |
| AO:Analog Output | 模拟输出 |
| DO:Digital Output | 数字输出 |
| 内部时钟源 CK_INT:Clock Internal | 内部时钟源 |
| 外部时钟源 ETR:External Trigger | 时钟源 External 触发 |
| 外部时钟源 ETR:External Trigger mode 1 | 外部时钟源 External 触发 时钟模式1 |
| 外部时钟源 ETR:External Trigger mode 2 | 外部时钟源 External 触发 时钟模式2 |
| 外部时钟源 ITRx:Internal Trigger inputs | 外部时钟源,ITRx (Internal trigger inputs)内部触发输入 |
| 外部时钟源 TIx:exTernal Input pin | 外部时钟源 TIx (external input pin)外部输入引脚 |
| CCR:Capture/Comapre Register | 捕获/比较寄存器 |
| OC:Output Compare | 输出比较 |
| IC:Input Capture | 输入捕获 |
| TI1FP1:TI1 Filter Polarity 1 | Extern Input 1 Filter Polarity 1,外部输入1滤波极性1 |
| TI1FP2:TI1 Filter Polarity 2 | Extern Input 1 Filter Polarity 2,外部输入1滤波极性2 |
| DMA:Direct Memory Access | 直接存储器存取 |
正文:
0. 概述
从 2024/06/12 定下计划开始学习下江协科技STM32课程,接下来将会按照哔站上江协科技STM32的教学视频来学习入门STM32 开发,本文是视频教程 P2 STM32简介一讲的笔记。
本节学习一下串口数据包收发的思路和流程
接下来就来学习一下如何去规定一个合理的数据包格式,以及如何收发数据包。
数据包格式一般有两种:一种是Hex数据包,一种是文本数据包。
先看一下Hex数据包格式。
1.🚢Hex数据包
首先数据包的作用是把一个个单独的数据给打包起来,方便我们进行多字节的数据通信。
我们之前学习了串口的代码,发送一个字节,接收一个字节都没问题。但在实际应用中,我们可能需要把多个字节打包为一个整体进行发送。比如说我们有个陀螺仪传感器,需要用串口发送数据STM32。陀螺仪的数据,比如x轴一个字节,y轴一个字节,z轴一个字节,总共三个数据需要连续不断的发送,当你像这样xyzxyzxyz连续发送的时候,就会出现一个问题,就是接收方不知道这数据哪个对应x,哪个对应y,哪个对应z,因为接收方可能会从任意位置开始接收,所以会出现数据错位的现象。
这时候我们就需要研究一种方式,把这个数据进行分割,把xyzxyzxyzxyz这一批数据分割开,分成xyz,分成一个个数据包。这样再接收的时候就知道了数据包的第一个数据就是x,第二个是y,第三个是z。这就是数据包的任务,就是把属于同一批的数据进行打包和分割,方便接收方进行识别。
有关分割打包的方法可以是自己发挥想象力来设计,只要逻辑行得通就行。比如可以设计在这个xyzxyzxyzxyz数据流中,数据包的第一个数据,也就是x的数据包,它的最高位置1,其余数据包最高位都置0。这样当接收到数据之后,判断一下最高位,如果是1,就是x数据,然后紧跟着的两个数据就分别是y和z,这就是一种可行的分割方法。

这种方法就是把每个数据的最高位当做标志位来进行分割的。实际也有应用的例子,比如UTF8的编码方法和这就是类似的。
但是 本节我们主要讲的数据包分割方法 , 并不是在数据的高位添加标志位这种方式。因为这种方式破坏了原有数据 , 使用起来比较复杂。
****我们串口数据包通常使用的是额外添加包头包尾这种方式。****比如这里就列举了两种数据包格式
第一种是固定包长,含包头包尾

第二种是可变包长,含包头包尾
也就是每个数据包的长度可以是不一样的。前面是包头,后面是包尾。

数据包格式可以是用户根据需求自己规定的,也可以是你买个模块别的开发者规定的。
我们这里规定是,比如固定包长,一批数据规定有四个字节,在这四个字节之前加个包头,比如定义0xFF为包头。在四个字节之后加一个包尾,比如定义0xFE为包尾。当接收到0xFF之后就知道一个数据包来了,接着再接收到的四个字节就当做数据包的第一,二、三、四个数据存在一个数组里,最后跟一个包尾。当收到0xFE之后就可以置一个标志位,告诉程序收到了一个数据包。然后新的数据包过来再重复之前的过程。
这样就可以在一个连续不断的数据流中分割出我们想要的数据包来。这就是通过添加包头包尾,实现数据分割打包的思路。
接着我们来研究几个问题。
收发过程中的问题
🐟️🐟️第一个问题就是包头包
这里定义FF为包头FE为包尾,那如果传输的数据本身就是FF和FE怎么办?
这个问题确实存在,如果数据和包头包尾重复可能会引起误判。对应这个问题,我们有如下几种解决方法:
尾和数据载荷重复的问题
第一种 方法 , 限制载荷数据的范围
如果可以的话,我们可以在发送的时候,对数据进行限幅,比如xyz三个数据变化范围都可以是0~100,我们可以在载荷中只发送0~100的数据,这样就不会和包头报尾重复了。
第二种 方法 , 如果无法避免载荷数据和包头包尾重复 , 就尽量使用固定长度的数据包
这样由于载荷数据是固定的,只要我们通过包头包尾对齐了数据,我们就可以严格知道哪个数据应该是包头包尾,哪个数据应该是载荷数据。在接收载荷数据的时候,我们并不会判断它是否是包头包尾。而在接收包头包尾的时候,我们会判断它是不是确实是包头包尾,用于数据对齐。这样在经过几个数据包的对齐之后,剩下的数据包应该就不会出现问题了。
第三种 方法 , 就是增加包头包尾的数量 , 并且让它尽量呈现出 载荷 数据出现不了的状态
比如我们使用FF、FE作为包头,FD、FC作为包尾,这样也可以避免再和数据和包头包尾重复的情况发生。
🐟️🐟️第二个问题是这个包头包尾并不是全部都需要的
比如我们可以只要一个包头,把包尾删掉。这样数据包的格式就是一个包头FF加四个数据,这样也是可以的。当检测到FF开始接收,收够四个字节后置标志位,一个数据包接收完成,这样也可以。不过这样的话,载荷和包头重复的问题会更严重一些。
比如最严重的情况下,载荷全是FF,包头也是FF,那肯定不知道哪个是包头了。而加上FE作为包尾,无论数据怎么变化,都是可以分辨出包头包尾的。
🐟️🐟️第三个问题就是固定包长和可变包长的选择问题
对应hex数据包来说,如果载荷会出现和包头包尾重复的情况,就最好选择固定包长,这样可以避免接收错误。如果你又会重复又选择可变包长,数据很容易就乱套了。
如果载荷不会和包头包尾重复,可以选择可变包长数据长度,像这样四位、三位、一位、十位、来回任一变,肯定都没问题。因为包头包尾是唯一的,只要出现包头就开始数据包,只要出现包尾就结束数据包,这样就非常灵活。
这就是固定包长和可变包长选择的问题。
🐟️🐟️第四个问题就是各种数据转换为字节流的问题
这里数据包都是一个字节一个字节组成的,如果想发送十六位的整形数据,三十二位的整形数据,float double,甚至是结构体,其实都没问题。因为它们内部其实都是由一个字节一个字节组成的,只需要用一个uint8_t的指针指向它,把它们当做一个字节数组发送就行了。
接下来看一下文本数据包。
2.🚢文本数据包
文本数据包和Hex数据包就分别对应了文本模式和Hex这两种模式。在Hex数据包里面,数据都是以原始的字节数据本身呈现的。而在文本数据包里面,每个字节就经过了一层编码和译码,最终表现出来的就是文本格式。但实际上每个文本字符背后,其实都还是一个字节的hex数据。
同样文本数据包也可以有两种模式:
第一种是固定包长,含包头包尾

第二种是可变包长,含包头包尾

由于数据译码成了字符形式,这就会存在大量的字符可以作为包头包尾,可以有效避免载荷和包头包尾重复的问题。比如我这里规定的就是以@这个字符作为包头,以'\r''\n',也就是换行这两个字符作为包尾。
在载荷数据中间,可以出现除了包头包尾的任意字符,这很容易做到。所以文本数据包基本不用担心载荷和包头包尾重复的问题 ****,****使用非常灵活。可变包长、各种字母、符号、数字都可以随意使用。
当我们接收到载荷数据之后,得到的就是一个字符串,在软件中再对字符串进行操作和判断。就可以实现各种指令控制的功能了,而且字符串数据包表达的意义很明显,可以把字符串数据包直接打印到串口助手上,什么指令、什么数据一眼就能看明白。所以这个文本数据包通常会以换行作为包尾。这样在打印的时候就可以一行一行的显示了非常方便。
3.🚢Hex数据包和文本数据包的优缺点
Hex数据包和文本数据包这两种对比下来其实也各有优缺点。
hex数据包
优点是传输最直接解析数据非常简单,比较适合一些模块发送原始的数据。比如一些使用串口通信的陀螺仪,温湿度传感器,
缺点就是灵活性不足,载荷容易和包头包尾重复。
文本数据包
优点是数据直观易理解,非常灵活,比较适合一些输入指令,进行人机交互的场合。比如蓝牙模块常用的AT指令,CNC和3D打印机常用的G代码都是文本数据包的格式。
缺点就是解析效率低,比如发送一个数100,hex数据包,就是一个字节100完事儿,文本数据包就得是三个字节的字符,'1''0''0',收到之后,还要把字符转换成数据才能得到一百。
所以说我们需要根据实际场景来选择和设计数据包格式 。
接下来我们就来学一下数据包的收发流程。
4.🚢数据包的收发流程
首先是数据包的发送,这个比较简单。
发送数据包
如果想发送一个数据包,就定义一个数组填充数据,然后用上节我们写过的SendArray函数一发就完事了,文本数据包这里也很简单,写一个字符串,然后调用SendString一发送也完事了。
所以说发送这个数据包是很简单的,因为发送过程是完全自主可控的,想发啥就发啥,我们写代码的时候也能感受到串口发送比接收简单多了。
接下来接收一个数据包就比较复杂了。
接收数据包
这里演示了固定包长hex数据包的接收方法 和可变包长文本数据包的接收方法,其他的数据包也都可以套用这个形式。下节写程序就会根据这里面的流程来。
HEX数据包接收
我们先看一下如何来接收这个固定包长的hex数据包。
首先根据之前的代码,我们知道每收到一个字节程序都会进一步中断。在中断函数里,我们可以拿到这一个字节,但拿到之后我们就得退出中断了。所以每拿到一个数据都是一个独立的过程。而对于数据包来说很明显,它具有前后关联性。包头之后是数据,数据之后是包尾。对于包头、数据和包尾这三种状态,我们都需要有不同的处理逻辑。所以在程序中,我们需要设计一个能记住不同状态的机制。
在不同状态执行不同的操作 , 同时还要进行状态的合理转移。这种程序设计思维就叫做 ' 状态机 ' ****。****在这里我们就使用状态机的方法来接收一个数据包,要想设计一个好的状态机程序画一个这样的状态,转移图是必要的。

对于上面这样一个固定包长hex数据包来说,我们可以定义三个状态,第一个状态是等待包头、第二个状态是接收数据、第三个状态是等待包尾,每个状态需要用一个变量来标志一下。比如这里用变量s来标志。三个状态依次为s等于0,s等于1,s等于2。这一点类似于置标志位,只不过标志位只有零和一,而状态机是多标志位状态的一种方式。
然后执行流程是最开始s等于0收到一个数据进中断,根据s等于0进入第一个状态的程序,判断数据是不是包头FF,如果是FF则代表收到包头,之后置s等于1,退出中断结束。这样下次再进中断,根据s等于1就可以进行接收数据的程序了。
在第一个状态,如果收到的不是FF就证明数据包没有对齐,我们应该等待数据包包头的出现。这时状态就仍然是0,下次进中断,就还是判断包头的逻辑,直到出现FF才能转到下一个状态。
之后出现了FF,我们就可以转移到接收数据的状态了。这时再收到数据,我们就直接把它存在数组中。另外再用一个变量记录收纳多少个数据,如果没收够四个数据,就一直是接收状态。如果收够了,就置s等于2,下次进入中断时就可以进入下一个状态了。
最后一个状态就是等待包尾了。判断数据是不是FE,正常情况应该是FE,这样就可以置s等于0,回到最初的状态,开始下一个轮回。当然也有可能这个数据不是FE,比如数据和包头重复,导致包头位置判断错了,这个包尾位置就有可能不是FE,这时就可以进入重复等待包尾的状态,直到接收到真正的包尾。这样加入包尾的判断,更能预防因数据和包头重复造成的错误。这就是使用状态机接收数据包的思路。
这个状态机其实是一种很广泛的编程思路,在很多地方都可以用到。使用的基本步骤是先根据项目要求定义状态画几个圈,然后考虑好各个状态,在什么情况下会进行转移,如何转移,画好线和转移条件,最后根据这个图来进行编程,这样思维就会非常清晰了。比如你要做个菜单,就可以用到状态机的思维,按什么键切换,什么菜单,执行什么样的程序。还有一些芯片内部逻辑也会用到状态机,比如芯片什么情况下进入待机状态,什么情况下进入工作状态,这也是状态机的应用。希望大家可以研究一下,对你的编程肯定会有帮助。
接下来继续我们来看一下这个可变包长文本数据包的接收流程。
文本数据包接收
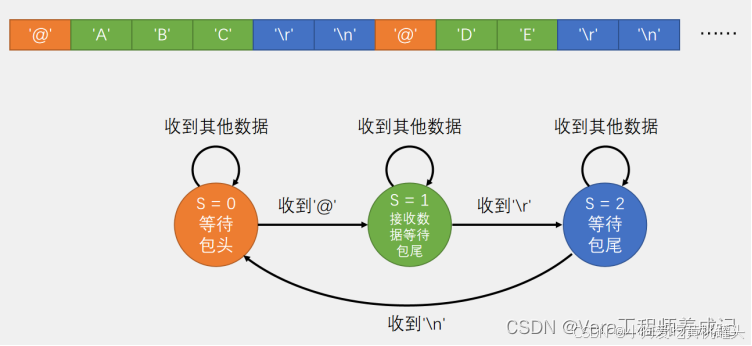
同样也是利用状态机定义三个状态 。第一个状态,等待包头,判断收到的是不是我们规定的@符号,如果是就进入接收状态,在这个状态下依次接收数据。同时,这个状态还应该要兼具等待包尾的功能,因为这是可变包长,我们接收数据的时候,也要时刻监视,是不是收到包尾了,一旦收到包尾了就结束。这个状态的逻辑就应该是收到一个数据判断是不是'\r',如果不是则正常接收,如果是则不接受,同时跳到下一个状态,等待包尾'\n',因为这里数据包有两个包尾'\r''\n',所以需要第三个状态。如果只有一个包尾,在出现包尾之后,就可以直接回到初始状态了,只需要两个状态就行。因为接收数据和等待包尾需要在一个状态里同时进行。
由于串口的包头包尾不会出现在数据中,所以基本不会出现数据错位的现象。这就是使用状态机接收文本数据包的方法。
下节我们就写程序验证一下以上所学的内容。