视频讲解
第1季:第10章_其他SLAM系统
-
先 导 课
-
第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
-
第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
-
第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
-
答 疑 课
------(永 久 免 费 ● 系 列 课 程 ● 长 期 更 新)------

添加图片注释,不超过 140 字(可选)
本书内容安排

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
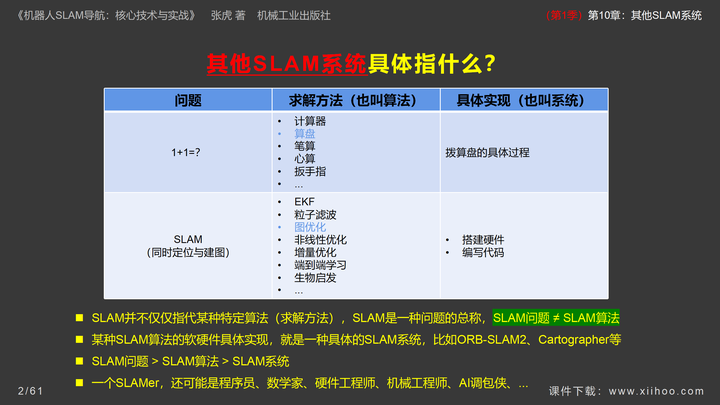
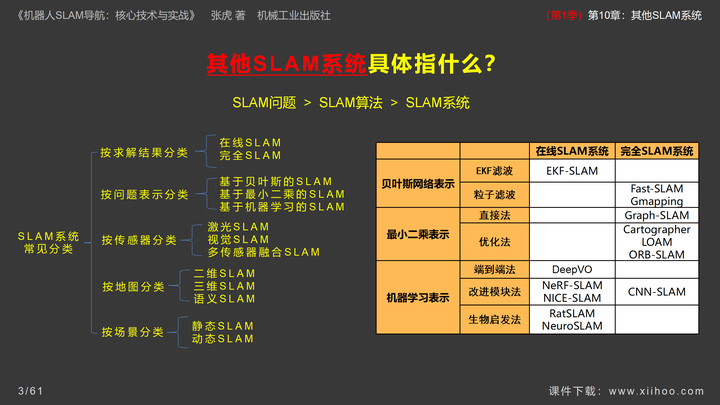
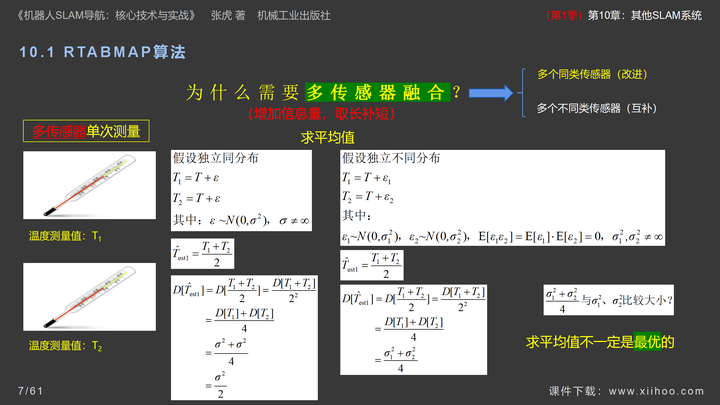
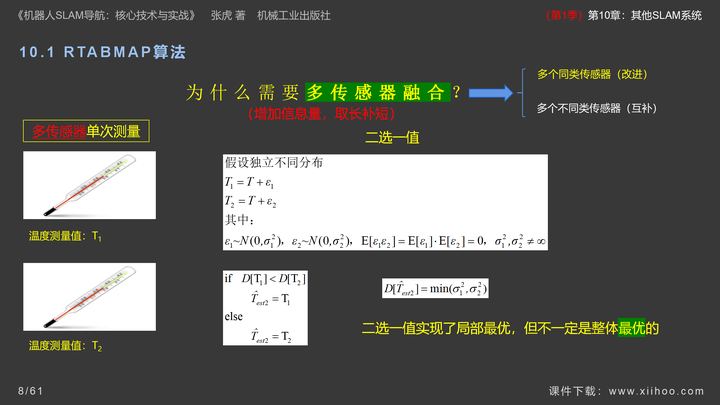
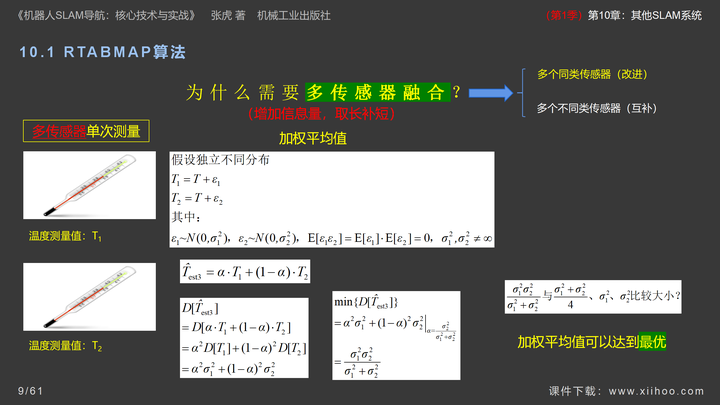
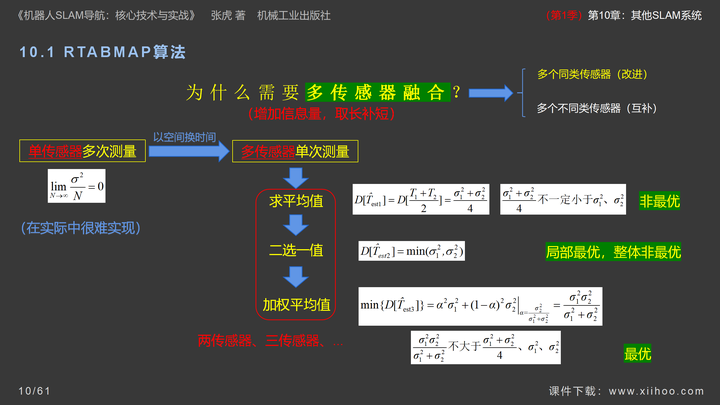
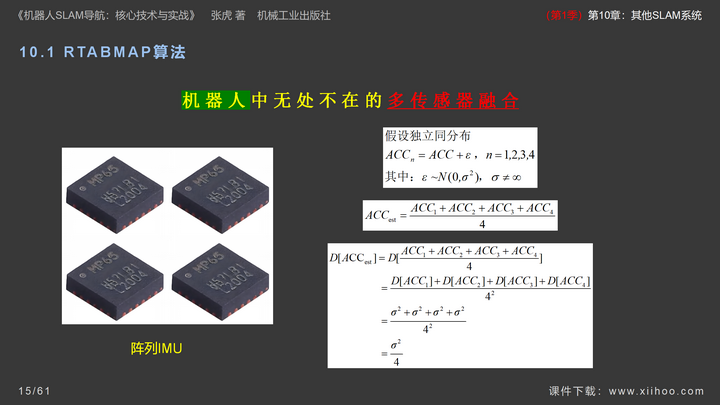
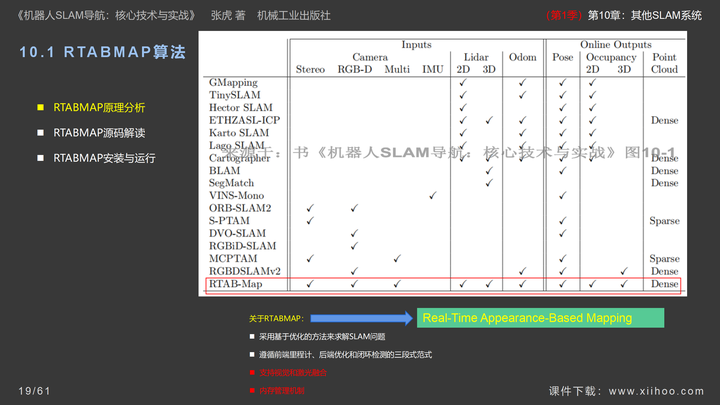
10.1 RTABMAP算法
①RTABMAP原理分析
RTABMAP系统框架
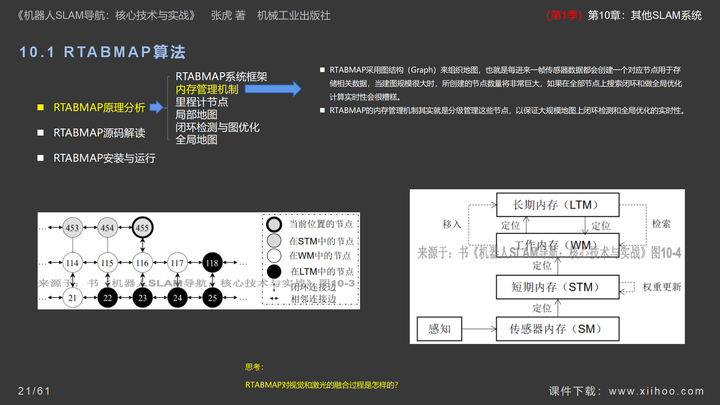
内存管理机制
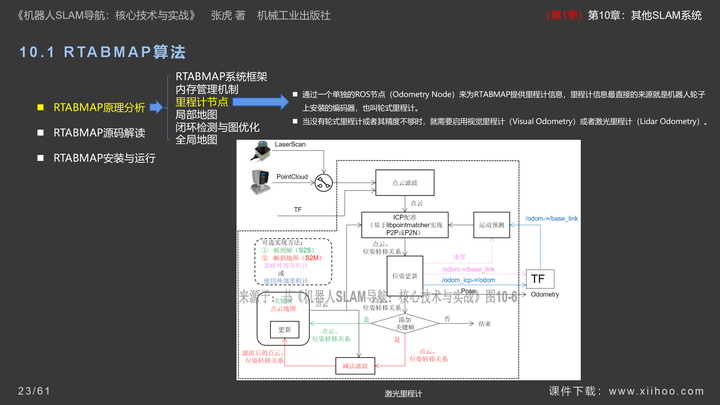
里程计节点
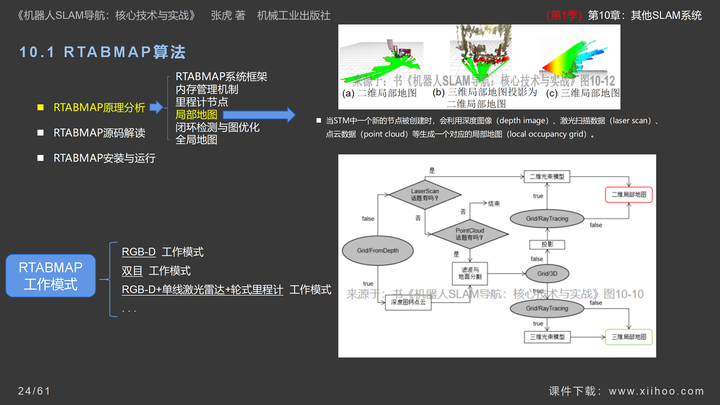
局部地图
闭环检测与图优化
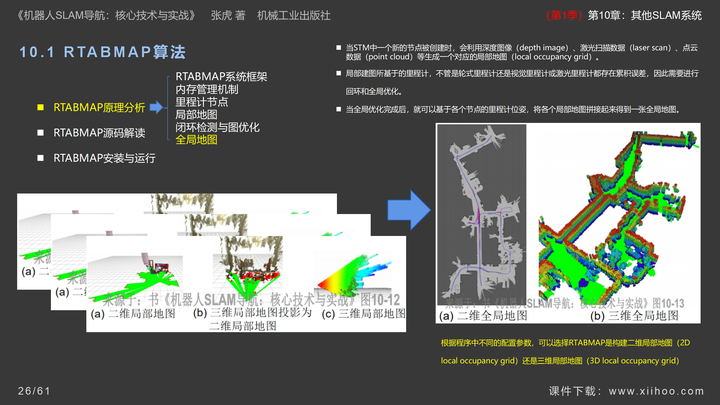
全局地图
②RTABMAP源码解读
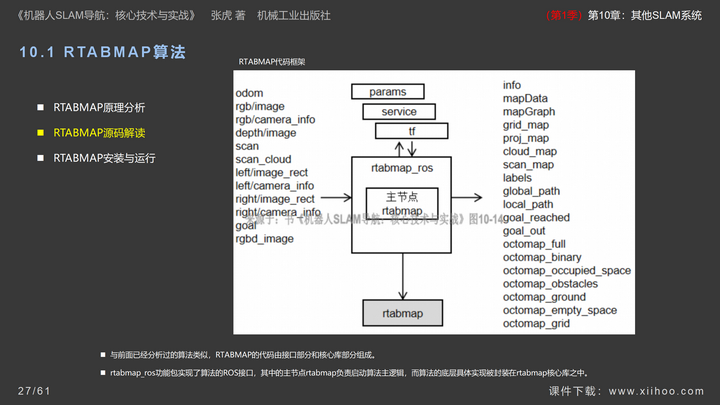
RTABMAP代码框架
rtabmap_ros功能包中包含的节点
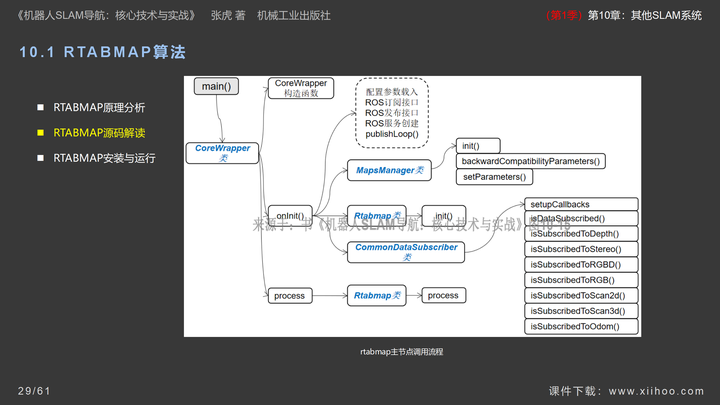
rtabmap主节点调用流程
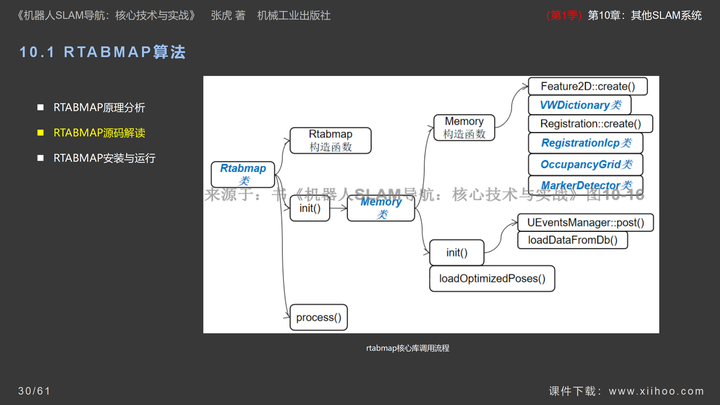
rtabmap核心库调用流程
③RTABMAP安装与运行
安装依赖
安装rtabmap核心库
安装rtabmap_ros功能包
RTABMAP离线运行
RTABMAP在线运行

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
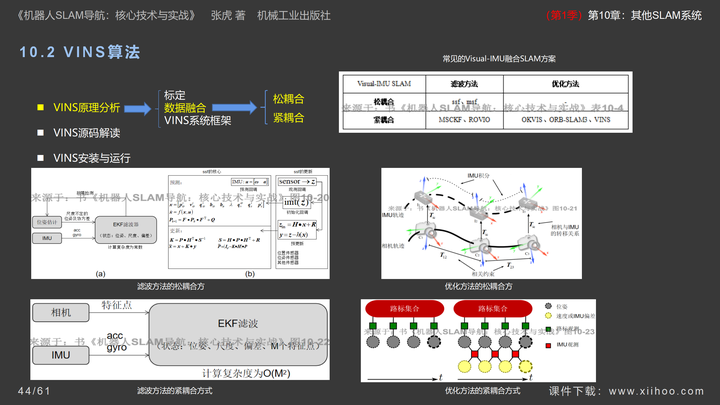
10.2 VINS算法
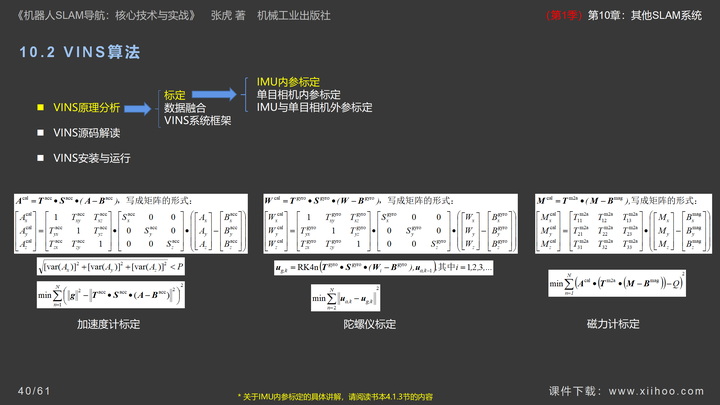
①VINS原理分析
标定
数据融合
VINS系统框架
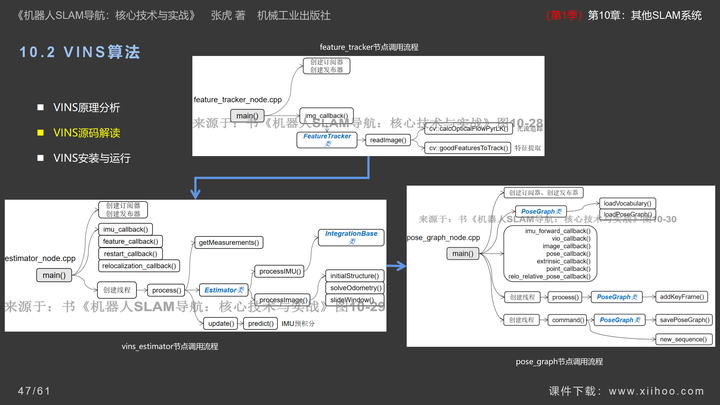
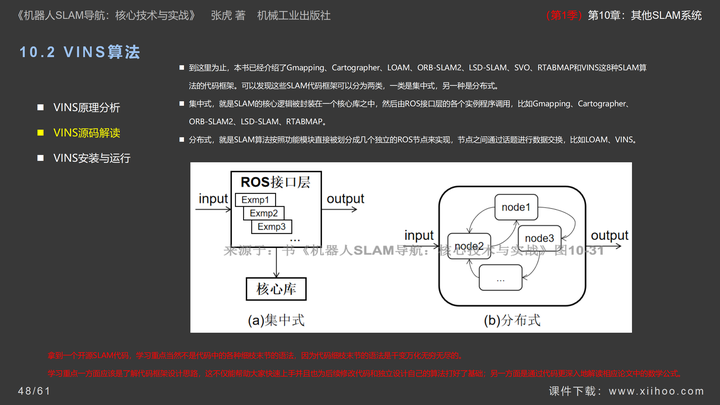
②VINS源码解读
VINS的3个ROS节点及其接口
feature_tracker节点调用流程
vins_estimator节点调用流程
pose_graph节点调用流程
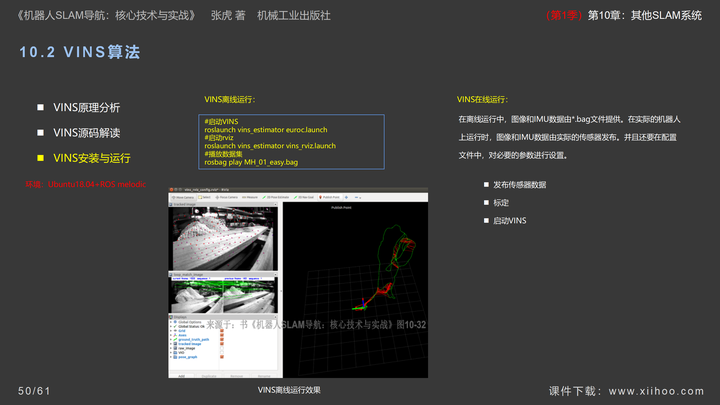
③VINS安装与运行
安装依赖
编译源码
VINS离线运行
VINS在线运行

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
10.3 机器学习与SLAM
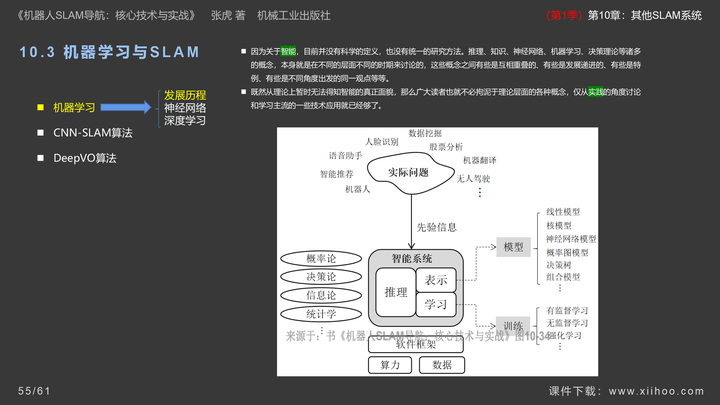
①机器学习
发展历程
神经网络
深度学习
②CNN-SLAM算法
CNN-SLAM系统框架
CNN深度估计模块
CNN语义分割模块
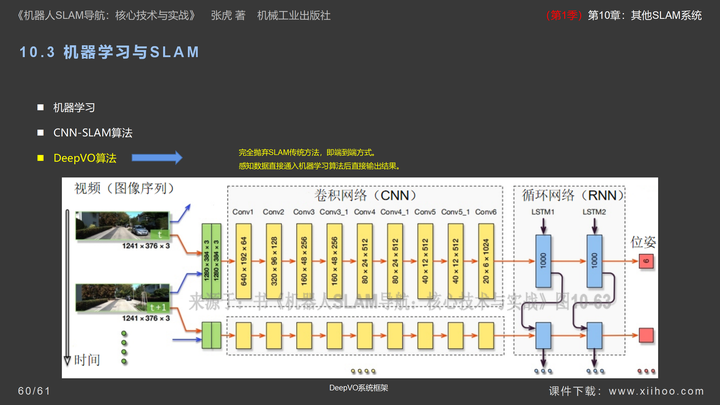
③DeepVO算法
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
例程源码下载
-
Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
课件下载
PPT课件下载:
PDF课件下载: