之前有一篇博客写了Avizo自动化批量导出wrl文件:【Avizo&Python】离散颗粒的分割、网格化与单颗粒批量自动保存wrl文件_avizo python-CSDN博客
还有一篇写了wrl转为xyz格式文件:
Wrl文件转XYZ文件-Python_python 打开wrl三维模型-CSDN博客
在这篇博客中,程序仅读取了顶点信息,面片信息直接被丢弃了,这样会丢失一手的网格信息,并不利于后续的数据分析和结构表征。
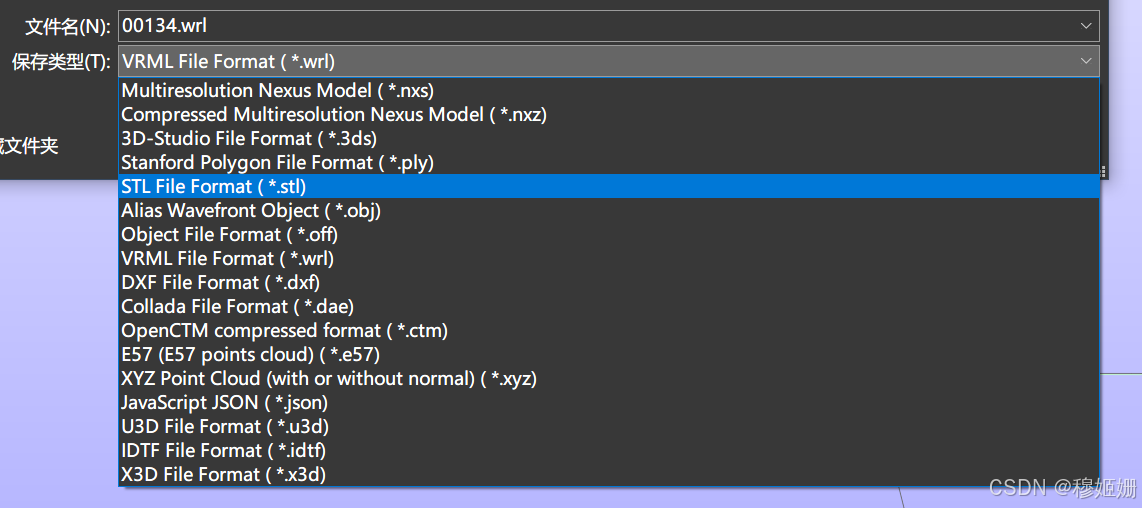
前几天在用Meshlab的时候,发现可以读取Wrl文件后直接导出stl/obj格式文件:
那就想有没有像Avizo之类的内置python,结果找到了PyMeshLab的官方库:cnr-isti-vclab/PyMeshLab: The open source mesh processing python library
官方手册:PyMeshLab --- PyMeshLab documentation
安装方式(Python >= 3.7 (64 bit)):
bash
pip3 install pymeshlab然后就直接:
python
# wrl2stl_0913.py
import pymeshlab
import os
from tqdm import tqdm
wrls = []
gel = r'C:\DataSet_DOOR\dataset_3Dbubble\1008-gel-reexport'
for root, dirs, files in os.walk(gel):
for file in tqdm(files):
if file.endswith(".wrl"):
wrls = os.path.join(root, file)
ms = pymeshlab.MeshSet()
ms.load_new_mesh(wrls)
wrls = wrls.replace('0802gel', 'mesh')
wrls = wrls.replace('wrl', 'stl')
# stl_path = os.path.join(gel, '0802gel1-stl', file.replace('wrl', 'stl'))
ms.save_current_mesh(wrls)STL还不可以直接用,存在问题如下:
- STL的坐标还是Avizo中的坐标,分布在世界各地,需要进行中心化,将中心坐标移动到原点;
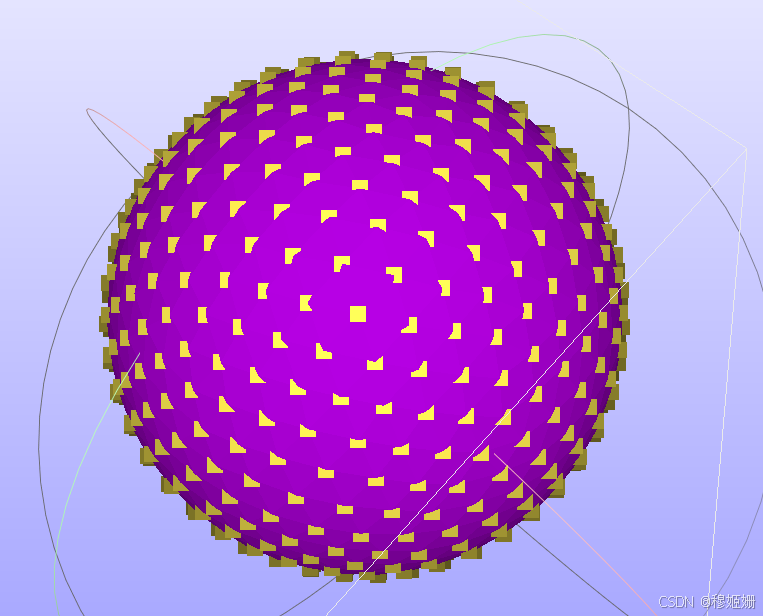
- 在一个非常不起眼的角落,存在着一个圆球,每个文件中都存在,尺寸固定。这导致对点坐标计算平均值求的点云中心位置的时候出现很大的偏差,导致中心化失败。这是wrl文件中存在的问题,不一定会遇到,但一定要检查。
罪魁祸首(长得像个病毒😡):
参考以下代码,其中还包括了点云超采样,如果不需要可以删掉。
python
import os
import cv2
import numpy as np
import pyvista as pv
import matplotlib.pyplot as plt
from tqdm import tqdm
def upsample_point_cloud(points, num_clusters):
# 点云上采样,返回mesh的点云数量大于num_clusters
cloud = pv.PolyData(points)
sample_spacing = 5
while(1):
mesh = cloud.reconstruct_surface(nbr_sz = 10, sample_spacing = sample_spacing)
# 提取顶点作为新的点云
new_points = np.asarray(mesh.points)
if new_points.shape[0] < num_clusters * 1.1:
sample_spacing *= 0.9
else:
break
return mesh
stl_folder = r"C:\DataSet_DOOR\dataset_3Dbubble\1008-gel-reexport\mesh1-filter"
# stl_folder = r"C:\DataSet_DOOR\dataset_3Dbubble\1008-gel-reexport\mesh2-filter"
# 保存点到文件
progress1 = tqdm(os.listdir(stl_folder), dynamic_ncols=True, desc="Read STL", leave=True)
for stl_file in progress1:
if stl_file.endswith(".stl"):
stl_path = os.path.join(stl_folder, stl_file)
mesh = pv.read(stl_path)
points = np.array(mesh.points, dtype=float)
distance_to_origin = np.linalg.norm(points, axis=1)
# 筛出异常球
points = points[distance_to_origin >= 100] / 1000000
points -= np.mean(points, axis=0)
# plotter = pv.Plotter()
# actor = plotter.add_points(points, color = '#c8c8ff')
# actor = plotter.add_points(np.array([0, 0, 0]), color = '#f14c36')
# actor = plotter.show_bounds(grid='back',
# location='outer',
# ticks='both',
# n_xlabels=2,
# n_ylabels=2,
# n_zlabels=2,
# xtitle='X',
# ytitle='Y',
# ztitle='Z',
# )
# plotter.show()
# mesh = upsample_point_cloud(points, 5000)
# 仅进行一次点云上采样
cloud = pv.PolyData(points)
mesh = cloud.reconstruct_surface(nbr_sz = 10, sample_spacing = 0.8)
mesh.smooth_taubin(n_iter=10, pass_band=5, inplace = True)
mesh = mesh.fill_holes(100)
mesh.save(stl_path.replace('filter', 'center'))