树莓派5将以前的CSI和DSI接口合并成两个两用的CSI/DSI(MIPI)端口。
一、配置摄像头
使用树莓派摄像头或第三方相机可以按照下面表格修改相机配置:
| 摄像头模块 | 文件位于:/boot/firmware/config.txt |
|---|---|
| V1 相机 (OV5647) | dtoverlay=ov5647 |
| V2 相机 (IMX219) | dtoverlay=imx219 |
| HQ 相机 (IMX477) | dtoverlay=imx477 |
| GS相机(IMX296) | dtoverlay=imx296 |
| 摄像头模块 3 (IMX708) | dtoverlay=imx708 |
| IMX290 和 IMX327 | dtoverlay=imx290,clock-frequency=74250000 或(两个模块共享 IMX290 内核驱动程序;有关正确的频率, 请参阅模块供应商的说明) dtoverlay=imx290,clock-frequency=37125000 |
| IMX378型 | dtoverlay=imx378 |
| OV9281系列 | dtoverlay=ov9281 |
若自己使用的不是树莓派官方摄像头,可以按照表格上面的内容修改config.txt文件,将dtoverlay内容添加进/boot/firmware/config.txt文件内。
sudo nano /boot/firmware/config.txt

例如:树莓派使用IMX219摄像头,将摄像头接在树莓派J4接口,然后修改/boot/firmware/config.txt文件:
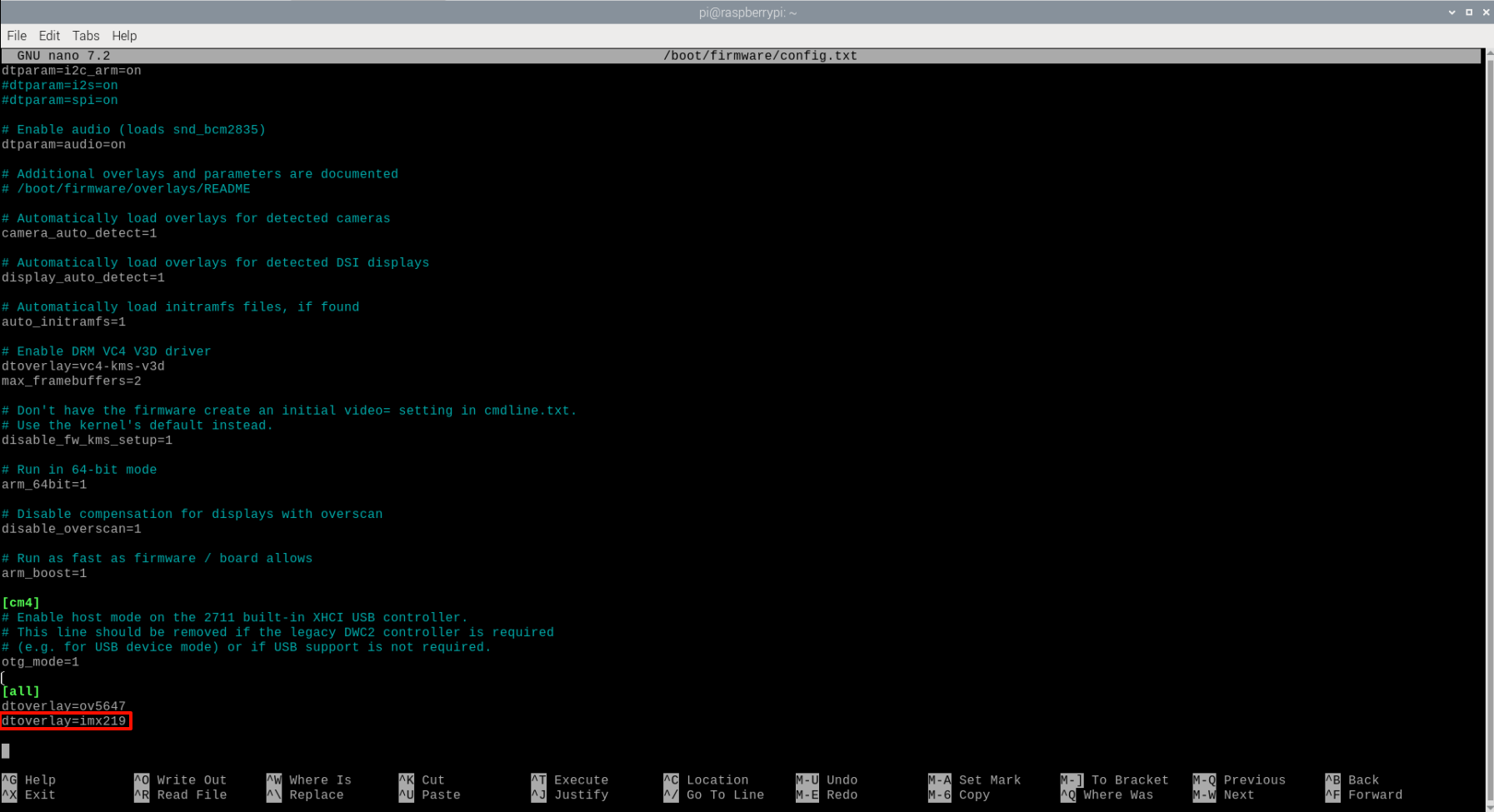
使用IMX219摄像头需要接在树莓派5的J4接口才可以识别!dtoverlay=ov5647和dtoverlay=imx219分别指的是树莓派广角摄像头和IMX219摄像头!修改配置文件,重启生效!
二、使用摄像头
2.1 预览摄像头
- rpicam-hello
在终端输入该命令会显示预览窗口约5秒钟
- rpicam-hello -t 0
在终端运行该命令会一直显示预览窗口,可以用过窗口关闭按钮和Ctrl+C按键退出!
2.2 拍照
- rpicam-jpeg -o test.jpg
显示5秒的预览,然后捕获图像并将其保存为test.jpg文件
- rpicam-jpeg -o test.jpg -t 2000 --width 640 --height 480
显示2秒的预览,然后捕获图像并将其保存为test.jpg文件,图像的宽度为640像素,高度为480像素。
rpicam-still
该命令可用于保存不同格式文件:
rpicam-still -e png -o test.png
rpicam-still -e bmp -o test.bmp
rpicam-still -e rgb -o test.data
rpicam-still -e yuv420 -o test.data
- 原始图像捕获
rpicam-still -r -o test.jpg
- 延时拍摄
以间隔2秒连续捕获图像,捕获总时长为30秒,并将每张图像保存为类似image0001.jpg这样的文件名格式:
rpicam-still -t 30000 --timelapse 2000 -o image%04d.jpg
2.3 录像
rpicam-vid
用于在树莓派上使用摄像头模块进行视频录制的命令。
示例:录制10秒的视频并写入test.h264文件
rpicam-vid -t 10000 -o test.h264
播放视频
vlc test.h264
注意事项:若test.h264文件无法播放,出现报错,请尝试下面这种方法解决。
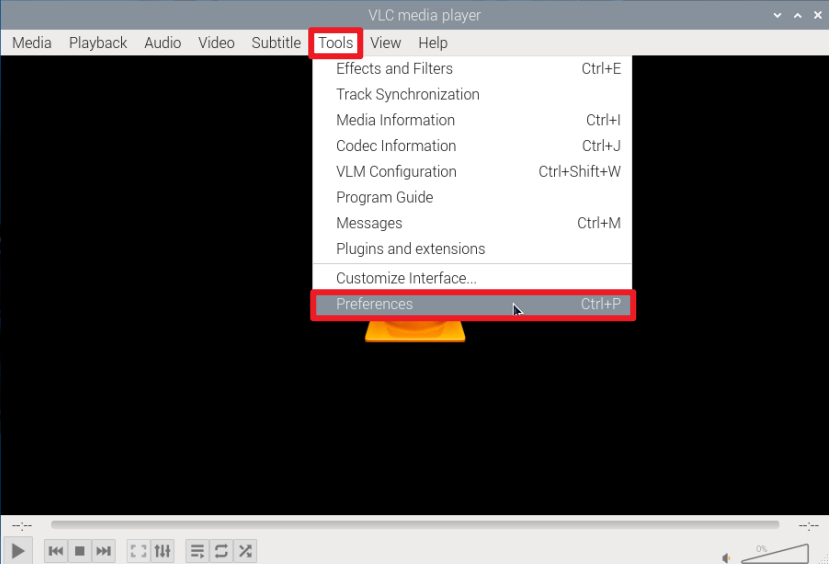
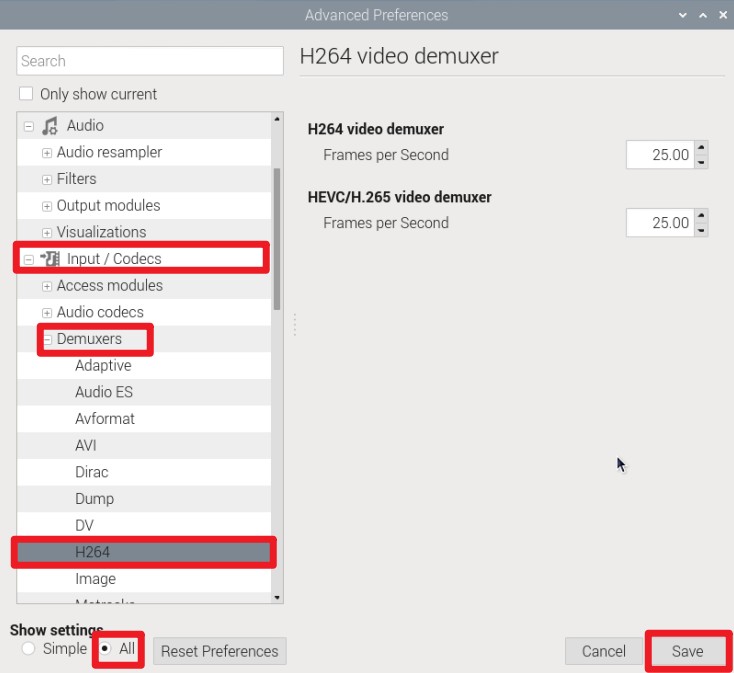
报错解决方法
修改H264每秒播放的帧率