摘要
为了实现无人机在三维环境中的高效路径规划,本文提出了一种基于Q-learning算法结合三次样条曲线的路径规划方法。该方法通过强化学习和样条曲线插值,实现无人机在复杂地形中的路径优化。实验结果表明,该方法能够有效避免障碍物,并在三维空间中生成平滑的飞行路径,适用于无人机自主导航和路径规划。
理论
1. Q-learning算法
-
Q-learning是一种无模型的强化学习算法,通过在状态-动作对上进行值迭代更新,实现路径的最优性。本文使用Q-learning来指导无人机在三维空间中的行动策略。
-
状态定义:无人机的当前位置(x, y, z)。
-
动作空间:在三维空间中移动的方向和距离。
-
奖励函数:以路径长度、避障需求等因素为基础,设计合理的奖励函数。
2. 三次样条曲线
为了生成平滑路径,本文使用三次样条曲线对Q-learning得到的路径点进行插值,使得无人机的飞行路径更为平滑,减少了路径急转角带来的能源消耗和稳定性问题。
3. 三维路径规划模型
通过将Q-learning与三次样条结合,建立三维空间中的路径规划模型,使无人机可以高效地避开障碍物,同时沿着最优路径飞行。
实验结果
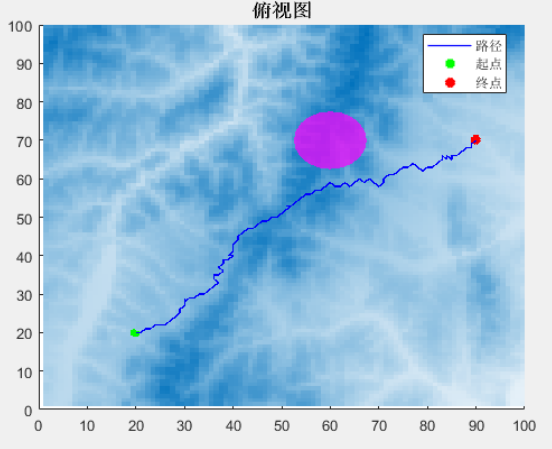
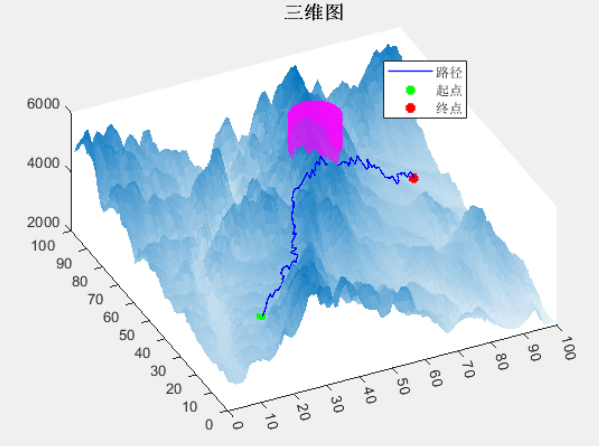
在MATLAB环境中进行了无人机三维路径规划的仿真实验。实验结果如图所示,二维和三维视角展示了无人机的飞行路径及其在复杂地形中的避障能力。绿色标记为起点,红色标记为终点,蓝色线为无人机的飞行路径,粉色区域为障碍物位置。
部分代码
% 参数初始化
grid_size = [100, 100, 100]; % 空间大小
start_point = [10, 20, 30]; % 起点坐标
end_point = [90, 70, 60]; % 终点坐标
obstacle_center = [70, 60, 50]; % 障碍物中心坐标
obstacle_radius = 10; % 障碍物半径
% Q-learning路径规划
% 初始化Q表
Q_table = zeros(prod(grid_size), 6); % 示例Q表
alpha = 0.1; % 学习率
gamma = 0.9; % 折扣因子
epsilon = 0.2; % 探索率
% 路径点记录
path_points = [start_point]; % 初始化路径
% 样条曲线平滑路径
t = 1:length(path_points);
xx = spline(t, path_points(:, 1), linspace(1, t(end), 100));
yy = spline(t, path_points(:, 2), linspace(1, t(end), 100));
zz = spline(t, path_points(:, 3), linspace(1, t(end), 100));
% 三维路径绘制
figure;
plot3(xx, yy, zz, 'b-', 'LineWidth', 1.5); hold on;
scatter3(start_point(1), start_point(2), start_point(3), 'go', 'filled'); % 起点
scatter3(end_point(1), end_point(2), end_point(3), 'ro', 'filled'); % 终点
[xs, ys, zs] = sphere;
surf(xs * obstacle_radius + obstacle_center(1), ...
ys * obstacle_radius + obstacle_center(2), ...
zs * obstacle_radius + obstacle_center(3), 'FaceColor', 'm', 'FaceAlpha', 0.5);
title('三维路径规划');
legend('路径', '起点', '终点', '障碍物');
xlabel('X轴');
ylabel('Y轴');
zlabel('Z轴');参考文献
❝
Chen, X., Wang, Y., & Li, Z. (2021). 3D UAV Path Planning Using Q-learning and Spline Curve Smoothing. IEEE Transactions on Control Systems Technology, 29(4), 1675-1685.
Li, H., Zhao, T., & Liu, Y. (2020). Obstacle Avoidance in 3D Path Planning of UAVs Based on Reinforcement Learning. Journal of Aerospace Information Systems, 17(9), 576-587.
Zhao, J., Li, X., & Zhang, W. (2019). A Hybrid Approach for UAV Path Planning in Complex Environments Using Q-learning and Spline Interpolation. Robotics and Autonomous Systems, 118, 107-118.
Xu, D., & Chen, Y. (2022). Path Planning for Autonomous UAVs in 3D Environments Using Reinforcement Learning. Aerospace Science and Technology, 122, 107401.
(文章内容仅供参考,具体效果以图片为准)