目录
- 一、前言
- 二、两个核心概念
-
- [2.1 Routines](#2.1 Routines)
-
- (1)清晰的Prompt
- [(2)工具调用json schema自动生成](#(2)工具调用json schema自动生成)
- (3)解析模型的toolcall指令
- PS.扩展阅读
一、前言
现在大语言模型中的第一性原理:Scaling laws正在失效的论调四起,大模型大有迎来瓶颈期的感觉。然而,世界在AI领域都在较劲,虚虚实实,不可信其有也不可信其无。但是有个方向是一致的,那就是多Agent的路线。无论是AI头部企业OpenAI、Google、Facbook、Microsoft还是业界大佬Andrew FeiFeiLi、Michael Winikoff等都对多Agent技术路线作了充分的肯定。本文是对阅读Ilan Bigio的《Orchestrating Agents: Routines and Handoffs》的回炉理解和分享,其文章平实未有半点修饰,基础阐述了多Agent协作的底层算法逻辑。而OpenAI推出的教育框架Swarm就是源于此Idea.

二、两个核心概念
多Agent协作Idea引入了概念: routines 和handoffs,通过基于这两个概念的python代码实现,完成了多个智能体间的转移、协作和完整的用户交互。
2.1 Routines
这个词通过体会,可以理解为简单的机械的任务列表。通过向LLM描述一些比较清晰的,简单的先后任务Prompt,和提供完成这些任务表所需的function或者tools,实现单个Agent完成某项"技能"的能力。这里的核心要点主要有两个:
(1)清晰的Prompt
需要向LLM提供一个较为明确,没有歧义容易操作的system的Promt描述,这个相当于对一个社会上的普通人,雇用后,对其进行业务的培训,让他/她明白这个岗位的职责和操作步骤,使其成为一个公司的特定岗位的业务员。
python
system_message = (
"You are a customer support agent for ACME Inc."
"Always answer in a sentence or less."
"Follow the following routine with the user:"
"1. First, ask probing questions and understand the user's problem deeper.\n"
" - unless the user has already provided a reason.\n"
"2. Propose a fix (make one up).\n"
"3. ONLY if not satesfied, offer a refund.\n"
"4. If accepted, search for the ID and then execute refund."
""
)(2)工具调用json schema自动生成
LLM现在都支持外部的tool/函数调用了,而且很多都是遵循OpenAi的规范格式,就是json schema格式,可以认为是大模型的结构化输出通讯协议的一种。
大模型JSON Schema格式是一种用于描述和验证JSON数据结构的规范。它定义了JSON数据中各个元素的类型、格式、约束和关系,确保了数据的一致性和可靠性。在软件开发、API设计以及数据交换过程中,JSON Schema发挥着重要作用(来自网络的定义,不知道说些什么)
"协议"的格式如下:
python
{
"type": "function",
"function": {
"name": "sample_function",#工具名称
"description": "This is my docstring. Call this function when you want.",#工具描述
"parameters": {#工具行参数描述
"type": "object",
"properties": {
"param_1": {#第1个参数
"type": "string"
},
"param_2": {#第2个参数
"type": "string"
},
"the_third_one": {#第3个参数
"type": "integer"
},
"some_optional": {#可选参数
"type": "string"
}
},
"required": [
"param_1",
"param_2",
"the_third_one"
] {#必须传入的参数
}
}
}其实就是对应的一个python的普通的funciton:
python
def sample_function(param_1, param_2, the_third_one: int, some_optional="John Doe"):
"""
This is my docstring. Call this function when you want.
"""
print("Hello, world")区别与需要手动定义这个JSON Schema,可以用一个python函数自动生成实现JSON Schema,这个也是用到了swarm框架里了:
python
import inspect
#实现一个自动JSON Schema生成
def function_to_schema(func) -> dict:
type_map = {
str: "string",
int: "integer",
float: "number",
bool: "boolean",
list: "array",
dict: "object",
type(None): "null",
}
try:
signature = inspect.signature(func)
except ValueError as e:
raise ValueError(
f"Failed to get signature for function {func.__name__}: {str(e)}"
)
parameters = {}
for param in signature.parameters.values():
try:
param_type = type_map.get(param.annotation, "string")
except KeyError as e:
raise KeyError(
f"Unknown type annotation {param.annotation} for parameter {param.name}: {str(e)}"
)
parameters[param.name] = {"type": param_type}
required = [
param.name
for param in signature.parameters.values()
if param.default == inspect._empty
]
return {
"type": "function",
"function": {
"name": func.__name__,
"description": (func.__doc__ or "").strip(),
"parameters": {
"type": "object",
"properties": parameters,
"required": required,
},
},
}以上的自动生成函数适合任何一个普通函数:
python
def add(a:int,b:int,isadd=True):
"""
this funciton is used to do add method when isadd is true or minuse method when isadd is false return the result
"""
if isadd:
return a+b
else:
return a-b
schema = function_to_schema(add)
print(json.dumps(schema, indent=2))打印结果如下:

有了以上两个法宝后就可以轻松实现agent的外部函数调用了:
python
# -*- coding: utf-8 -*-
"""
Created on Fri Nov 15 16:47:17 2024
@author: 18268
"""
import inspect
import json
def function_to_schema(func) -> dict:
type_map = {
str: "string",
int: "integer",
float: "number",
bool: "boolean",
list: "array",
dict: "object",
type(None): "null",
}
try:
signature = inspect.signature(func)
except ValueError as e:
raise ValueError(
f"Failed to get signature for function {func.__name__}: {str(e)}"
)
parameters = {}
for param in signature.parameters.values():
try:
param_type = type_map.get(param.annotation, "string")
except KeyError as e:
raise KeyError(
f"Unknown type annotation {param.annotation} for parameter {param.name}: {str(e)}"
)
parameters[param.name] = {"type": param_type}
required = [
param.name
for param in signature.parameters.values()
if param.default == inspect._empty
]
return {
"type": "function",
"function": {
"name": func.__name__,
"description": (func.__doc__ or "").strip(),
"parameters": {
"type": "object",
"properties": parameters,
"required": required,
},
},
}
def add(a:int,b:int,isadd=True):
"""
this funciton is used to do add method when isadd is true or minuse method when isadd is false return the result
"""
if isadd:
return a+b
else:
return a-b
schema = function_to_schema(add)
print(json.dumps(schema, indent=2))
from openai import OpenAI
# 定义模型
MODEL = "llama3.2:latest"
ollama_client = OpenAI(
base_url = 'http://localhost:11434/v1',
api_key='None', # required, but unused
)
messages = []
tools = [add]
tool_schemas = [function_to_schema(tool) for tool in tools]
response = ollama_client.chat.completions.create(
model=MODEL,
messages=[{"role": "user", "content": "1加1等于几"}],
tools=tool_schemas,
)
message = response.choices[0].message
print(message.tool_calls[0].function)最后模型根据用户输入"1加1等于几",会去查找工具的tool_schemas,并自主决定了调用add这个工具,输出如下:

这个是openai自定义的一个type:openai.types.chat.chat_completion_message_tool_call.Function
(3)解析模型的toolcall指令
这个就是当模型认为要调用工具时,会吐出要调用的某个函数的信息:

,包含一个function属性及对应名字和参数。接下来就是根据它,去调用实体的函数:
python
tools=[add]
tools_map = {tool.__name__: tool for tool in tools}#这里搞了一个tools_map,用于存多个funciton的名字
def execute_tool_call(tool_call, tools_map):
#根据openai的LLM返回格式,调用相应函数
name = tool_call.function.name
args = json.loads(tool_call.function.arguments)
print(f"Assistant: {name}({args})")
# call corresponding function with provided arguments
return tools_map[name](**args)
execute_tool_call(message.tool_calls[0], tools_map)如下调用了add函数,执行并输出了结果。

----未完待续-----
PS.扩展阅读
对于python机器人编程感兴趣的小伙伴,可以进入如下链接阅读相关咨询
ps1.六自由度机器人相关文章资源
(1) 对六自由度机械臂的运动控制及python实现(附源码)

ps2.四轴机器相关文章资源
(1) 文章:python机器人编程------用python实现一个写字机器人

(2)python机器人实战------0到1创建一个自动是色块机器人项目-CSDN直播
(3)博文《我从0开始搭建了一个色块自动抓取机器人,并实现了大模型的接入和语音控制-(上基础篇)》的vrep基础环境
(3)博文《我从0开始搭建了一个色块自动抓取机器人,并实现了大模型的接入和语音控制-(上基础篇)》的vrep基础环境
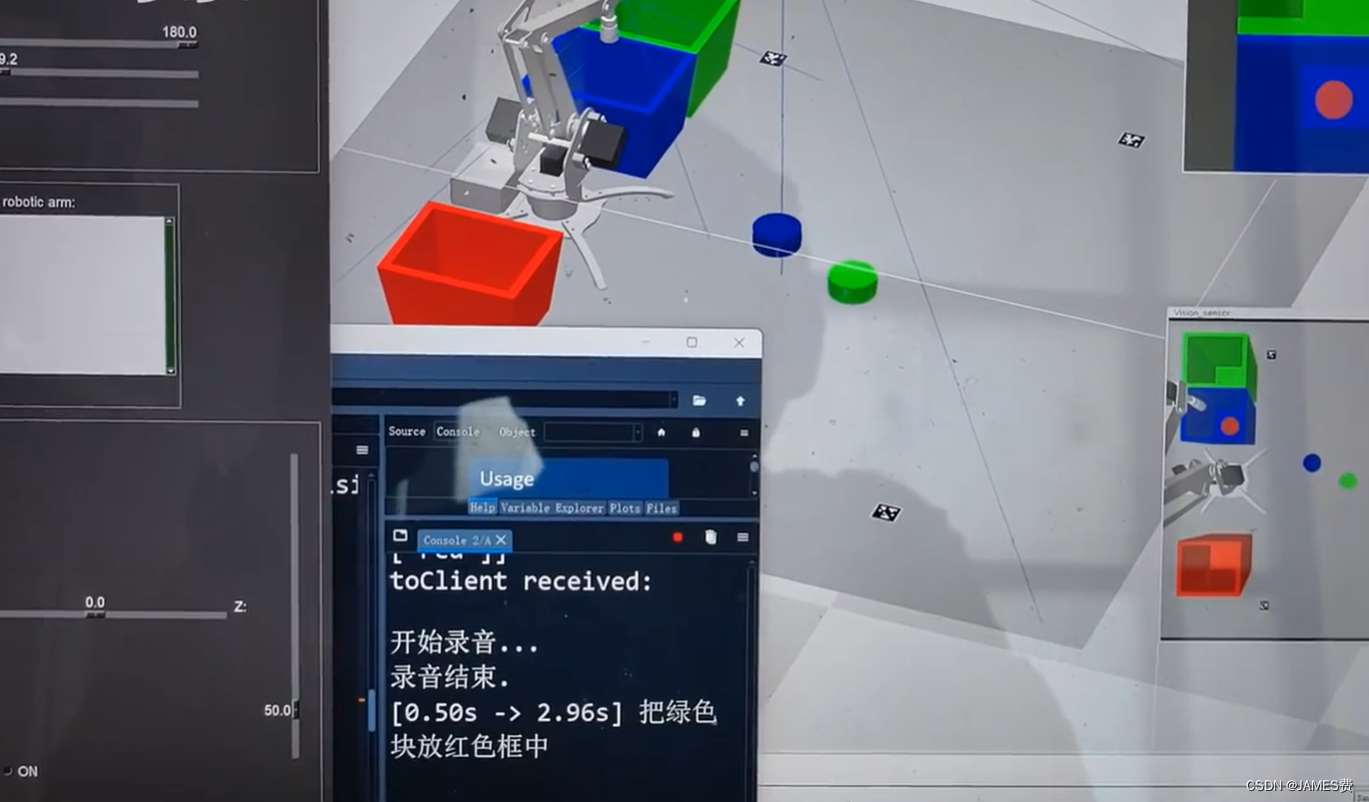
(4)实现了语音输入+大模型指令解析+机器视觉+机械臂流程打通
ps3.移动小车相关文章资源
(1)python做了一个极简的栅格地图行走机器人,到底能干啥?第五弹------解锁蒙特卡洛定位功能-CSDN博客
(2) 对应python资源:源码地址
(3)python机器人编程------差速AGV机器、基于视觉和预测控制的循迹、自动行驶(上篇)_agv编程-CSDN博客
(4)python机器人编程------差速AGV机器、基于视觉和预测控制的循迹、自动行驶(下篇)_agv路线规划原则python-CSDN博客
对应python及仿真环境资源:源码链接
ps3.wifi小车控制相关文章资源
web端配套资源源代码已经上传(竖屏版),下载地址
仿真配套资源已经上传:下载地址
web端配套资源源代码已经上传(横屏版),下载地址