分布式跟踪系列
CAT
skywalking
监控-skywalking-02-深入学习 skywalking 的实现原理的一些问题
监控-skywalking-05-in action 实战笔记
监控-skywalking-06-SkyWalking on the way 全链路追踪系统的建设与实践
其他
开源分布式系统追踪-03-CNCF jaeger-01-入门介绍
Jaeger
欢迎来到 Jaeger 文档!
在下面,您将找到适用于Jaeger初学者和有经验用户的信息。如果您找不到所需内容,或遇到未涵盖的问题,我们非常希望听到您的反馈。
关于
Jaeger是一个分布式追踪平台,由Uber Technologies于2016年发布为开源项目,并捐赠给Cloud Native Computing Foundation(CNCF),目前已成为CNCF的毕业项目。
通过Jaeger,您可以:
- 监控和排查分布式工作流
- 识别性能瓶颈
- 查找根本原因
- 分析服务依赖关系
了解更多
如果您是分布式追踪的新手,建议参考以下外部资源:
-
《Mastering Distributed Tracing (2019)》:由Jaeger的创始人Yuri Shkuro编写,书中深入讲解了Jaeger的设计和操作方面的内容,以及分布式追踪的基本概念。
-
《Take Jaeger for a HotROD ride》:这是一个分步教程,展示了如何使用Jaeger来解决应用程序性能问题。
-
《Introducing Jaeger》:一场介绍Jaeger及其功能的(较老)网络研讨会。
-
《Evolving Distributed Tracing at Uber》:这篇博客文章讲解了Jaeger的历史及其架构选择背后的原因。
Jaeger v2
(2024-11-12) Jaeger作为领先的开源分布式追踪平台,已经有9年的成功历史,并且与OpenTracing和OpenTelemetry等行业标准化工作紧密对接。
Jaeger是Cloud Native Computing Foundation(CNCF)首批毕业的项目之一。
经过超过60个版本的发布,Jaeger迎来了一个重要的里程碑------Jaeger v2的发布。Jaeger v2采用了OpenTelemetry Collector框架作为基础,并在此基础上扩展实现了Jaeger独特的功能。
它带来了显著的改进和变化,使Jaeger更加灵活、可扩展,并与OpenTelemetry项目更好地对接。详细内容请阅读完整的文章。
有关从Jaeger v1迁移到Jaeger v2的详细信息,请参阅迁移指南。
特性
-
基于OpenTracing的数据模型
-
兼容OpenTelemetry
-
多个内置存储后端:
- Cassandra 4+
- Elasticsearch 7.x, 8.x
- Badger
- Kafka(作为中间缓冲)
- 内存存储
-
通过远程存储API支持自定义后端扩展
-
系统拓扑/服务依赖关系图
-
自适应采样
-
服务性能监控(SPM)
-
数据收集后的处理
欲了解更多详情,请参阅功能页面。
截图
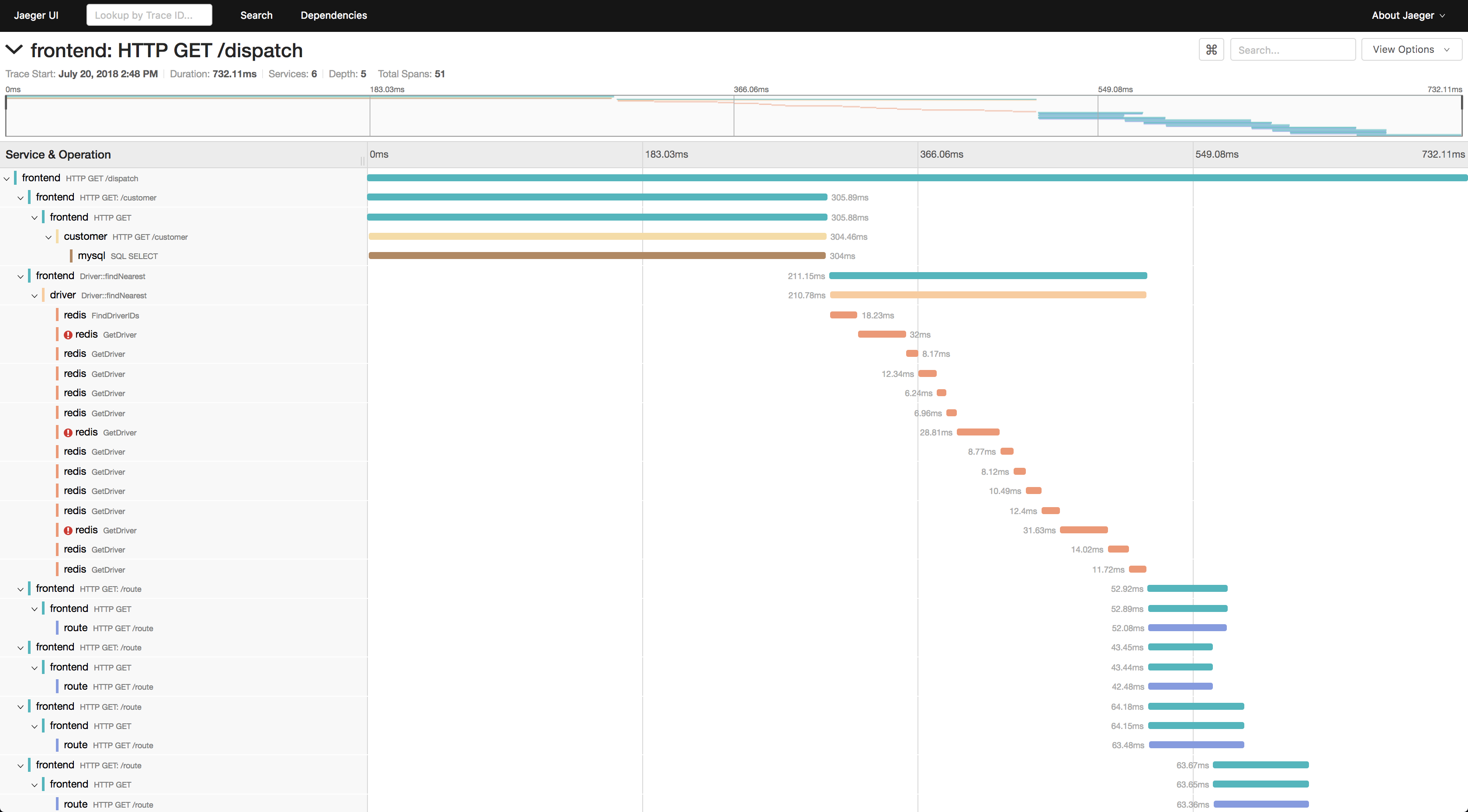
Traces View

Trace Detail View
Service Performance Monitoring View

特性
高扩展性
Jaeger 后端设计时考虑到没有单点故障,并能根据业务需求进行扩展。
例如,Uber 的 Jaeger 安装通常每天处理数十亿个 span。
云原生
Jaeger 后端以容器镜像或原生二进制文件的形式发布,支持多个平台。二进制文件的行为可以通过 YAML 配置文件进行定制。部署到 Kubernetes 集群的过程由 Kubernetes Operator 和 Helm Chart 协助完成。
OpenTelemetry
Jaeger 后端和 Web UI 从一开始就设计为支持 OpenTracing 标准。
- 通过 span 引用将追踪表示为有向无环图(而不仅仅是树)
- 支持强类型的 span 标签和结构化日志
- Jaeger 可以接收标准的 OpenTelemetry 协议(OTLP)中的追踪数据。然而,内部数据表示和 UI 仍遵循 OpenTracing 规范的模型。
多种存储后端
Jaeger 支持越来越多的存储后端:
- 原生支持流行的开源 NoSQL 数据库作为追踪存储后端:Cassandra 4.0+、Elasticsearch 7.x/8.x 和 OpenSearch 1.0+。
- 通过远程存储 API 可扩展支持其他经过 Jaeger 兼容认证的数据库,例如 ClickHouse。
- 支持嵌入式数据库,如 Badger 和简单的内存存储,用于测试环境。
- 社区正在进行一些实验,使用其他数据库,更多内容可参见该问题。
采样
为了控制应用程序的开销和存储成本,Jaeger 支持多种形式的采样:基于头部的采样(集中式远程配置,静态或自适应)和基于尾部的采样。有关更多信息,请参阅采样页面。
现代 Web UI
Jaeger Web UI 采用 JavaScript 实现,基于 React。v1.0 版本发布了几项性能改进,使 UI 能有效处理大量数据,并显示包含数万个 span 的追踪(例如,我们尝试了一个包含 80,000 个 span 的追踪)。
可观测性
所有 Jaeger 后端组件默认会暴露 Prometheus 指标。日志使用结构化日志库 zap 写入 stdout。
拓扑图
Jaeger UI 支持两种类型的服务图:系统架构图和深度依赖关系图。
系统架构图
这是一个"经典"的服务依赖关系图,显示架构中所有服务的依赖关系。该图仅表示服务之间的一跳依赖,类似于从服务网格产生的遥测数据。例如,图中的 A - B - C 意味着存在一些追踪记录了 A 和 B 之间的网络调用,还有一些追踪记录了 B 和 C 之间的调用。然而,这并不意味着存在从 A 到 C 的完整链条,即不能说 A 依赖于 C。
此图的节点粒度仅为服务,而非服务端点。
系统架构图可以通过内存存储实时构建,或者在使用分布式存储时,通过 Spark 或 Flink 任务构建。
深度依赖关系图
也称为"传递依赖图",其中 A -> B -> C 意味着 A 对 C 存在传递依赖。单个图需要一个"焦点"服务(以粉色显示),并且仅显示通过该服务的路径。通常,这种类型的图不表示系统的完整架构,除非存在一个与所有服务连接的服务(例如 API 网关),并将其选为焦点服务。
此图的节点粒度可以在服务和服务端点之间切换。在后者模式下,同一服务中的不同端点将作为单独的节点显示,例如 A::op1 和 A::op2。
目前,传递依赖图只能通过追踪搜索结果构建。未来将会有一个 Flink 任务,通过汇总所有追踪来计算这些图。
服务性能监控(SPM)
SPM 允许通过计算追踪的汇总指标,并将其可视化为时间序列图表,来监控和调查服务性能的趋势。
它是一个强大的工具,可以帮助识别和调查性能问题。
有关更多详细信息,请参阅服务性能监控(SPM)页面。
Zipkin 兼容性
虽然我们推荐使用 OpenTelemetry 对应用程序进行编码,但如果您的组织已经使用 Zipkin 库进行仪器化,您不必重写所有代码。
Jaeger 提供与 Zipkin 的向后兼容性,可以通过 HTTP 接收 Zipkin 格式的 span(Thrift、JSON v1/v2 和 Protobuf)。
从 Zipkin 后端切换到 Jaeger 后端,只需将流量从 Zipkin 库路由到 Jaeger 后端即可。