一:步进电机简介
步进电机又称为脉冲电机,简而言之,就是一步一步前进的电机。基于最基本的电磁铁原理,它是一种可以自由回转的电磁铁,其动作原理是依靠气隙磁导的变化来产生电磁转矩,步进电机的角位移量与输入的脉冲个数严格成正比,而且在时间上与脉冲同步,因而只要控制脉冲的数量、频率和电机绕组的相序,即可获得所需的转角、速度和方向。
1.1 步进电机主要分类
目前市面上主要的步进电机,按照绕组来分的话,共有二相、三相和五相等系列,最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。
该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步),由于摩擦力和制造精度等原因,实际控制精度略低,同一步进电机可配不同细分的驱动器以改变精度和效果。
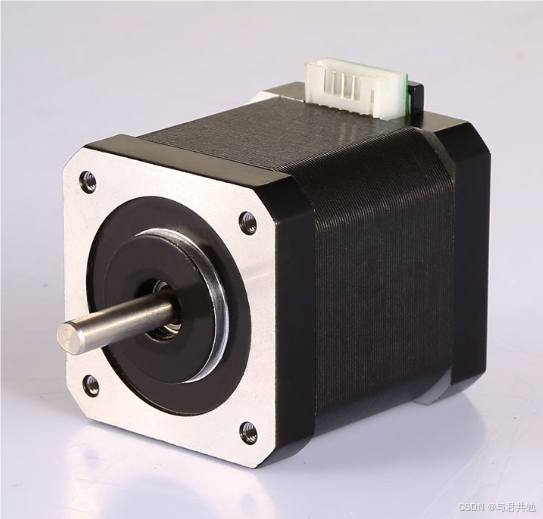
目前主流的步进电机一般是42步进电机和57步进电机,42步进电机的42,是指长宽各42mm,而不是其它含义。高一点的力矩大一些。步距角为1.8°。42步进电机在3D打印、网友DIY的各种写字机中用的非常多。
42步进电机:
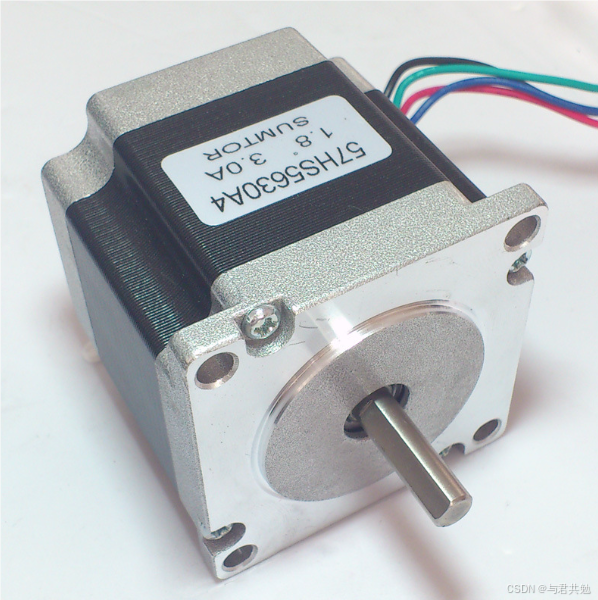
57步进电机:
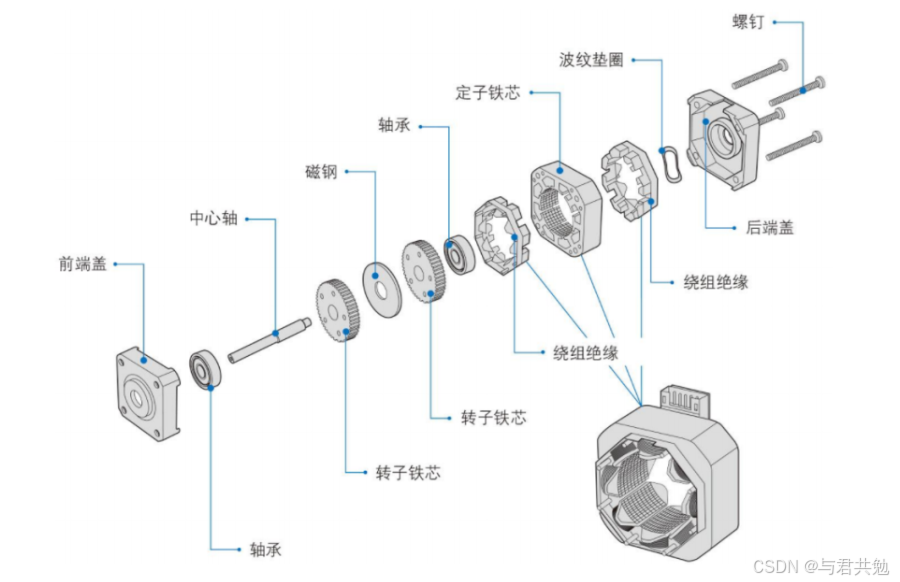
1.2 步进电机结构拆解
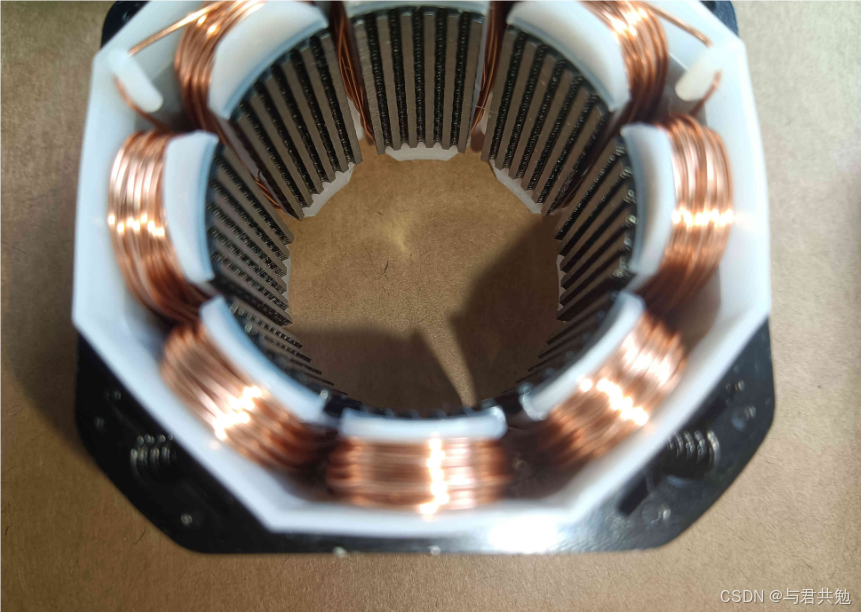
实际上,步进电机内部的结构主要是由很多小齿交错而成的,每交错一次步距角就可以缩小一倍,步距角越小则步进电机越精密,旋转一圈所需要的脉冲也就越多。目前市面上不管是42电机,还是57电机,亦或者是86电机,步距角一般都是1.8°。
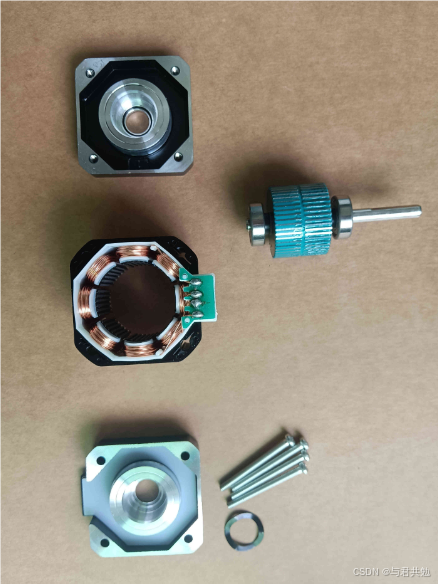
混合式42步进电机爆炸视图:
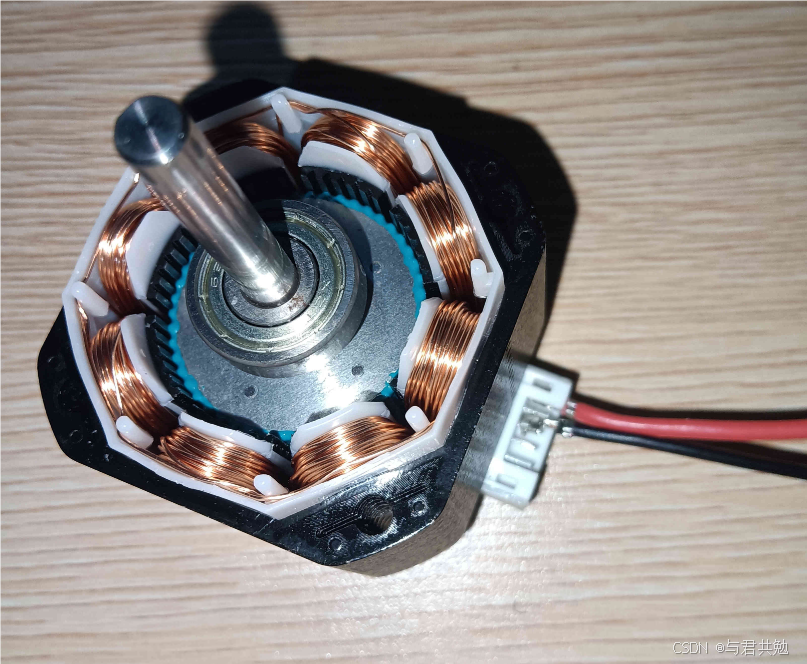
42步进电机实物拆卸图:
42步进电机内部齿图:
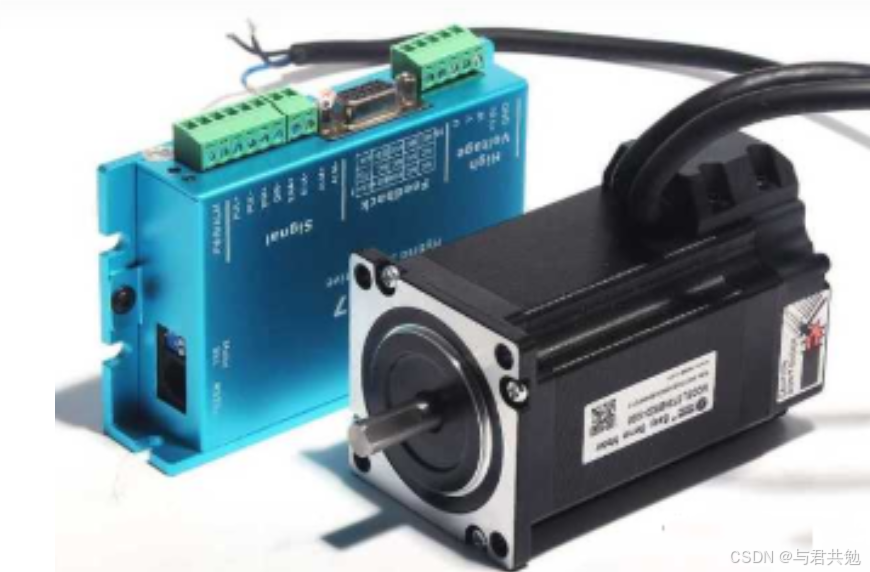
二:TB6600驱动器简介
步进电机驱动器有很多,就比如说28步进电机驱动器ULN2003,A4988以及我们使用的TB6600等等。
2.1 TB6600驱动器原理介绍
额,说实话驱动器的原理十分复杂,以我的能力我也讲不清楚,你也听不明白,所以还是搬出来最权威的手册吧!
TB6600驱动器手册地址:20161012102520yg1obn.pdf (dfrobot.com.cn)
虽然驱动器原理咱看不明白,但是不妨碍我们使用啊!
我们只要知道每一个端口分别是什么功能,怎么接,完全就可以了。

三:电路接线图示
3.1 TB6600驱动器端口功能讲解
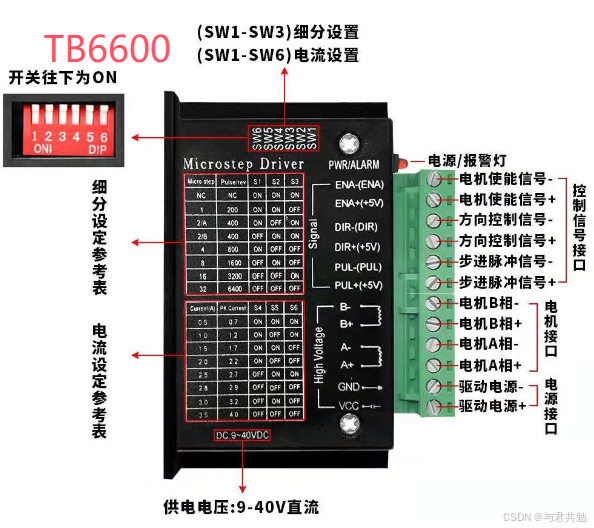
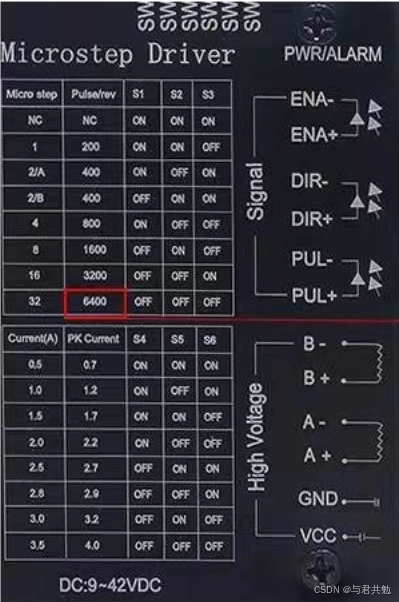
如下图所示,TB6600驱动器一共有12个端口,以及一排小开关。12个端口分别为电机使能信号(EN+)(EN-)、方向控制信号(DIR+)(DIR-)、步进脉冲信号(PIL+)(PUL-)、电机两相(A+,A-,B+,B-)、驱动电源(+,-)。一排小开关分别是细分设置和电流设置,sw1-sw3是细分设置,sw4-sw6是电流设置。
①电机使能信号(EN+)(EN-):电机使能信号,全名enable。顾名思义,就是让电机有旋转的能力和失去旋转的能力,他就相当于一个软件开关,只需要通过代码设计就可以实现步进电机使能或者失能,在失能的状态下,无论做何种操作,电机都不会有反应。
②方向控制信号(DIR+)(DIR-):方向控制信号,全名direction。顾名思义,就是可以通过控制这个端口的高低电平进而控制电机的旋转方向。后续我们可以使用这个驱动器的特性实现按键控制电机旋转方向或者其他一些操作。
③步进脉冲信号(PIL+)(PUL-):步进脉冲信号,全名pulse。步进脉冲信号是控制步进电机的灵魂信号,简而言之,控制步进电机,使能信号端口可以不接,顶多就让电机一直转呗。方向信号也可以不接,顶多步进电机无法改变方向。但是脉冲信号一定要接,根据目前对驱动器的了解,驱动器内部的芯片会根据你的脉冲信号,转换成能让步进电机旋转的信号,具体怎么做的还是去看驱动器技术文档哈。
④电机两相(A+,A-,B+,B-):按照目前的步进电机来说,市场上目前现行的步进电机一般都是二相步进电机,因为这样做在保证精度的情况下,更省成本。
⑤拨码开关:拨码开关的sw1-sw3是细分设置,sw4-sw6是电流设置。像42电机,我们假设采用8细分,转一圈需要1600个脉冲。他的额定电流是1.5A,那么我们就需要根据电流设定表,给他设定成 SW4 ON ,SW5 ON ,SW6 OFF。
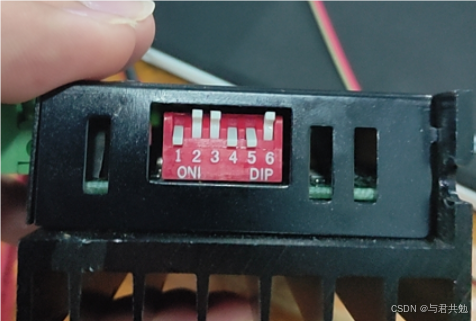
至于怎么设置拨码开关,在驱动器背部都写的明明白白的,按照上面写的来做就行了。
3.2 步进电机接线示意图
想要实现控制,必须有控制器、驱动器和控制对象。控制器我们就选用STM32F407单片机进行控制,至于为什么选这个因为我只有这个,用STM32F103单片机也不是不可以。驱动器我们就选用TB6600步进电机驱动器,控制对象就是我们的42步进电机。
3.3.1 驱动器接线
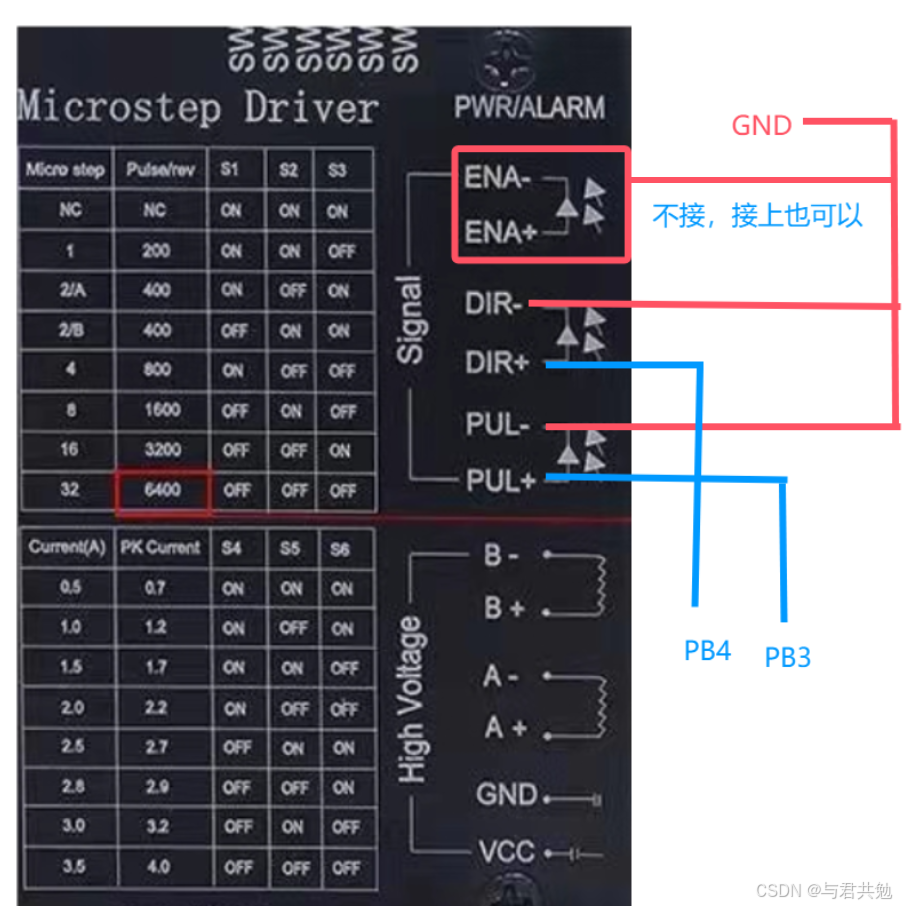
驱动器接线一般有两种,共阴极接法和共阳极接法。其实本质上都是一致的,共阴极即是把EN-、DIR-、PUL-全部都接到控制器上面的GND,也就是把他们全部接为低电位,其他端口只要设置为高电平就可以实现功能;共阳极也就是反过来接线,EN-、DIR-、PUL-全部都接到控制器上面的VCC,也就是把他们全部接为高电位,其他端口只要设置为低电平就可以实现功能。本质上都是检测到电位差实现相关功能。我们在此采用共阴极的接法。
先凑合看一下吧,本人画图能力实在有限。
注意到驱动器能够接受的输入电压在直流9-42V左右,最合适的还是在24V。注意驱动器VCC和GND不要接反了,接反了驱动器就要抽烟抽死了。
剩下的A、B两相,A+A-,B+B-,你不用担心步进电机的四根线,到底谁是A相,谁是B相。电机内部结构特性决定了谁是都可以,只是旋转方向会有差别而已(好像是这样)。教你一个小妙招,电机上面一共四根线,从中找出两根,只要这样根线碰在一起,步进电机手动旋转起来有阻力,那就说明这是同一相,不需要管是A相B相,暂定是A相,那另外两根线就是B相了。
3.3.2 控制器接线
控制器接线很简单,接那个I/O口全看自己的设置,就像我的话,我设置的PB3是控制步进电机旋转的I/O口,PB4是控制步进电机方向的I/O口,接线时只需要将PUL+接到PB3,DIR+接到PB4即可,这点没有什么可说的。
四:代码编写思路
下面就是紧张又刺激的代码编写阶段了。在这里我说一下主要最为重要的代码怎么编写,想要全套源码的uu们可以在文档结尾下载工程源码。
其实在代码里面,注释已经写得很清楚了,基本上不需要再怎么介绍了,直接上代码。
Motor.c
#include "Motor.h"
#include "Delay.h"
#include "led.h"
#define TotalNulses 1600 //设置步进电机为8细分,脉冲总数为1600脉冲
// Motor 配置
void Motor_Init(void)
{
//首先打开准备输出引脚的时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB,ENABLE);
//紧接着初始化对应的GPIO端口,进行相应的参数配置
GPIO_InitTypeDef GPIO_InitStructure; //创建GPIO_InitStructure结构体
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //设置引脚模式为输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //设置为推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3 | GPIO_Pin_4; //设置引脚为PB3和PB4引脚
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN; //设置为下拉输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置为输出速度为50MHz
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_3 | GPIO_Pin_4); //设置引脚的初始状态为高电位状态
}
void Motor_Start(void)
{
LED_BLUE_OFF; //宏定义,蓝灯打开
LED_RED_ON; //宏定义,红灯熄灭
Delay_ms(1000);
GPIO_SetBits(GPIOB,GPIO_Pin_4);
for(int i= 0; i < TotalNulses*2; i++) //模拟PWM控制步进电机
{
GPIO_SetBits(GPIOB,GPIO_Pin_3);
Delay_us(500); //可以修改延时函数里面的参数,更改步进电机旋转的速度。本质上是模拟改变了PWM的频率,进而改变了速度
GPIO_ResetBits(GPIOB,GPIO_Pin_3);
Delay_us(500);
}
LED_BLUE_ON;
LED_RED_OFF;
Delay_ms(1000);
GPIO_ResetBits(GPIOB,GPIO_Pin_4); //置PB4为低电位,改变旋转方向
for(int i= 0; i < TotalNulses*2; i++) //跟上文一样,不过是改变了步进电机旋转的方向
{
GPIO_SetBits(GPIOB,GPIO_Pin_3);
Delay_us(500);
GPIO_ResetBits(GPIOB,GPIO_Pin_3);
Delay_us(500);
}
}这段代码主要配置了控制步进电机脉冲和方向的两个端口引脚,然后自定义了一个电机控制函数,在函数里面模仿了PWM波形进行步进电机的控制。
Main.c
#include "stm32f4xx.h"
#include "led.h"
#include "Delay.h"
#include "usart.h"
#include "Motor.h"
#include "stm32f4xx_tim.h"
uint16_t speed=500;
// 程序入口主函数
int main(void)
{
USART1_Init(115200); // 初始化USART1; 注意, 在bsp_USART.c文件底部,printf已重定向到usart1, 可用于与电脑上位机通信;
Led_Init(); // LED 初始化
Motor_Init(); // 配置TIM
while (1) // while函数死循环;作用:不能让main函数运行结束,否则会产生硬件错误
{
Motor_Start();
}
}
// 每个代码文件的末尾,注意要加两个空行还有其他例如通信USART,LED模块在mian函数里面运行,移植时可能会出现灯不亮等情况,只需要简单的修改参数就可以了。至于工程源码大家可以到文章结尾进行下载。
五:实操效果展示
当然是可以旋转的更快的,只需要修改Motor,c里面的模拟PWM波形函数里面的Delay_us()的参数即可,本质上是修改了模拟PWM的频率,频率越高电机旋转的就越快。
文件源码分享:02-1 Simple IO Port Control Of Stepper Motor.zip - 蓝奏云
关于后续的PWM控制,将会在后面进行讲解。看在码字不易,用的不是某盘的份上,uu们可以点个赞嘛!谢谢。
,关注我,持续更新中~