1、程序功能说明
程序启动后,调整摄像头的俯仰角,把摄像头往下掰动,使得摄像头可以看到线,然后点击图像窗口,按下r 键进选色模式;接着在在画面中的线的区域内,框出所需要巡线的颜色,松开鼠标后会自动加载处理后的图像;最后按下空格键开启巡线功能。小车在运行过程中,遇到障碍物会停下并且蜂鸣器会响。
2、程序启动
2.1、启动命令
打开一个终端输入以下指令进入docker,
./docker_ros2.sh
出现以下界面就是进入docker成功

启动底盘
ros2 launch yahboomcar_bringup bringup.launch.py
再新开一个终端,进入同一个docker,以下的 da8c4f47020a 修改成实际终端显示的ID
docker ps
docker exec -it da8c4f47020a /bin/bash

进入docker容器后,终端输入,
ros2 run yahboomcar_astra follow_line
以巡黄线为例,

按下r键后,如上图选择蓝线区域,选定后松开鼠标,
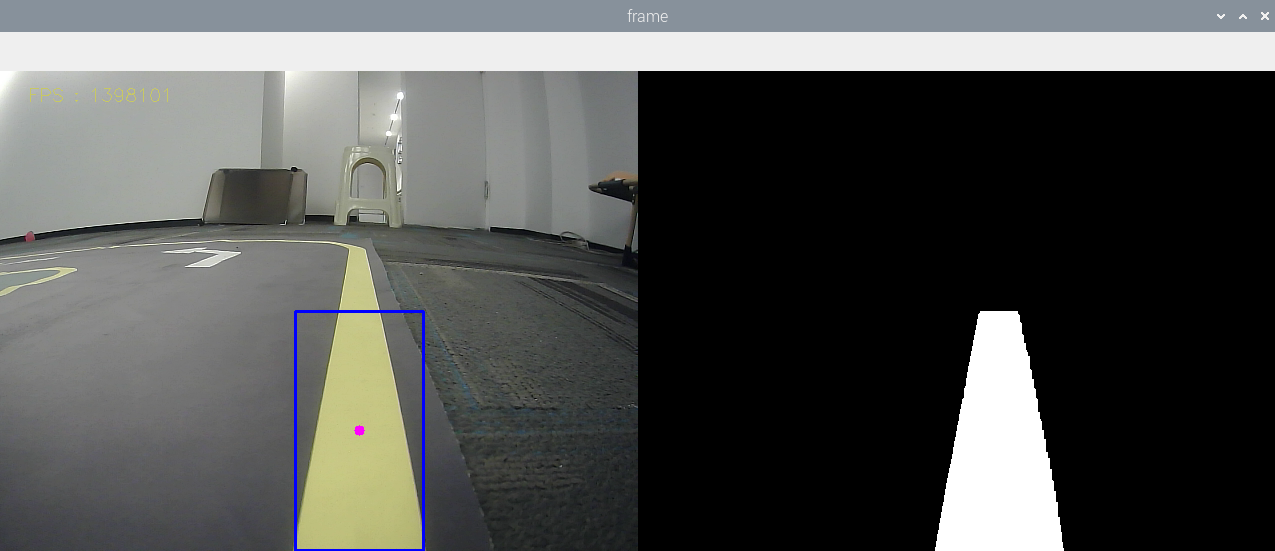
如上图所示,右边显示的就是处理后的图像,它会显示黄线部分。然后按下空格键则开始计算速度,小车巡线自动驾驶。
2.2、动态参数调节
可以通过动态参数器可以调节相关参数,docker终端输入,
ros2 run rqt_reconfigure rqt_reconfigure
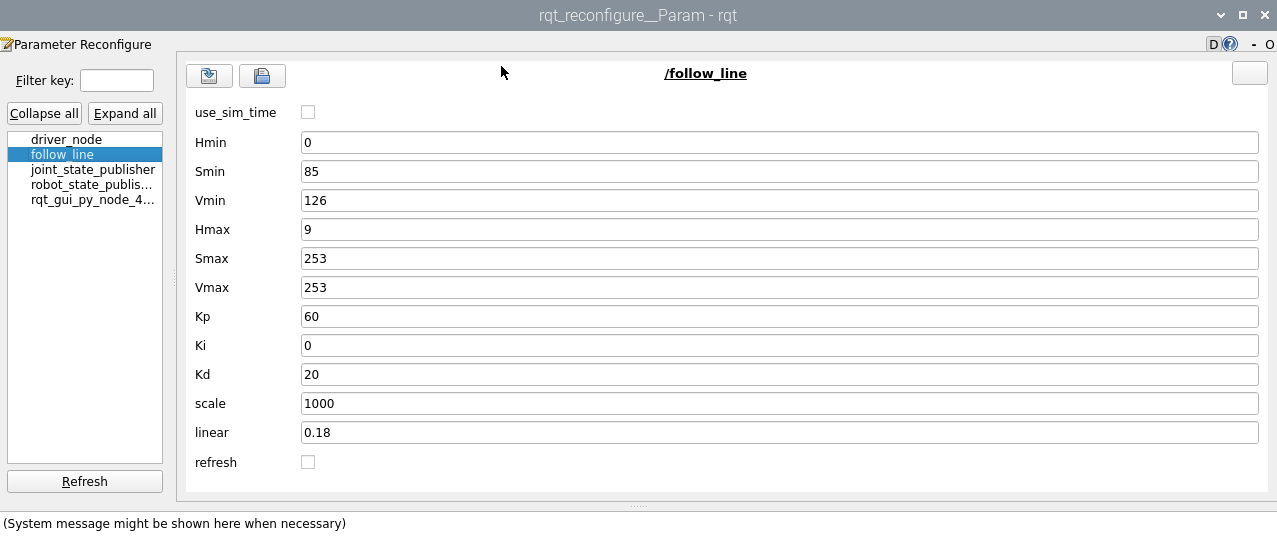
可调节的参数有,
| 参数 | 说明 |
|---|---|
| Kp | PID的P值 |
| Ki | PID的I值 |
| Kd | PID的D值 |
| scale | PID调节比例系数 |
| linear | 线速度大小 |
| ResponseDist | 避障检测距离 |
| refresh | 刷新参数按钮 |
3、核心代码
我们先梳理下巡线的实现原理,通过
- 计算巡线的中心坐标与图像中心的偏移量,
- 根据坐标偏移量计算出角速度的值,
- 发布速度驱动小车。
计算中心坐标,
#计算hsv值
rgb_img, self.hsv_range = self.color.Roi_hsv(rgb_img, self.Roi_init)
#计算self.circle,计算出X的坐标、半径值。半径值为0说明没有检测到线,则发布停车信息
rgb_img, binary, self.circle = self.color.line_follow(rgb_img, self.hsv_range)
计算出角速度的值,
#320是中心点的X坐标的值,通过得到的图像的X值与320的偏差,可以计算出"我现在距离中心有多远",然后计算角速度的值
z_Pid, _ = self.PID_controller.update((point_x - 320)\*1.0/16, 0)