引言:人机交互力控制是优化下肢外骨骼机器人性能的重要环节,精准的交互力控制对用户的安全和舒适性至关重要。传统的外骨骼控制策略通常依赖简化的动力学模型,忽略了外骨骼与人体之间复杂的全身动态相互作用。而引入全身动力学建模并结合优化算法,可以显著提高机器人对交互力的控制精度和运动表现。该论文提出了一种基于全外骨骼动力学模型的全新控制方法,能够有效地估计和调节用户与外骨骼之间的交互力,从而实现,提升交互的透明性及复杂交互场景中的稳定控制。
【基本信息】
论文标题:Haptic Transparency and Interaction Force Control for a Lower Limb Exoskeleton
发表期刊:IEEE Transactions on Robotics
发表时间:2024年1月29日
【访问链接】
论文链接: https://doi.org/10.1109/TRO.2024.3359541
【背景简介】
在下肢外骨骼机器人(带膝/踝关节)的人机交互力控制研究领域,研究主要集中在三个方向。
1. 全身动力学补偿法
这种方法把外骨骼机器人当做一个整体的浮动系统来建模,就像双足机器人一样,通过全身模型来估计接触力并补偿重力和科里奥利力。
不过,它有个明显的不足,就是没法精确计算人和外骨骼在非静态接触点的交互扭矩,而且没有利用交互力反馈来修正模型的误差,所以期望的交互扭矩只能作为一个预先设定的项,无法根据实际情况灵活调整。

2. 简化双摆模型配合交互力反馈法
可以考虑把外骨骼机器人的每一条腿简化成一个独立的双摆模型,在腿摆动或站立时,分别假设髋关节和踝关节是固定的。
用这个模型来算前馈补偿扭矩,再从测得的关节扭矩里减去,从而估计出人和外骨骼之间的交互扭矩,然后把这个估计值输入到PD或阻抗控制器里。
但这种简化模型有个问题,缺乏对背部结构的考虑,且腿部是独立建模的,所以对于站立腿的动态补偿扭矩和交互扭矩估计不够准确,导致站立腿只能承担自己的重量,而不是整个外骨骼的重量,对于需要提供强大支撑和长时间续航的外骨骼机器人来说是远远不够的。

3. 依赖穿戴者的交互力反馈法
这类方法通过在用户身上加装额外的传感器,或者针对每个用户进行专门的调整,来学习外骨骼和用户的全身动力学,实现触觉透明度或者特定的交互力控制。但是这类方法需要对每个用户单独训练和调整,且仅限于特定的交互模式,极大增加了使用成本和复杂性。

上述方法各有优势,但都没能在全外骨骼动力学的基础上实现整个步态周期内交互力的实时计算和闭环控制。
【核心科学问题】
如何精确控制下肢外骨骼与人体的交互力,以实现自然、透明的人机交互,是当前外骨骼机器人研究的关键挑战。
随着控制理论和传感器技术的发展,尤其是在人机交互领域的深入研究,我们已经能够在一定程度上实现对外骨骼的交互力控制。然而对于带脚的浮动基座下肢外骨骼,尤其是在复杂动态环境中,如地面行走时,如何在整个步态周期内准确地估计和控制交互力,仍然是一个未解决的问题。
因此,为了解决这一挑战,我们需要设计一种能够实时估计和控制交互力的策略,这种策略不仅要考虑外骨骼的全身动力学,还要能够在不同的步态阶段(如单脚支撑和双脚支撑)中平滑过渡,同时考虑到物理和安全限制,避免执行器过载或运动失控。
【核心研究思路】
针对下肢外骨骼与人体交互力的精确控制,本文提出了一种创新的控制策略------全外骨骼闭环补偿(WECC),用以提升外骨骼机器人与穿戴者交互过程中的"触感透明度",即穿戴者对外骨骼机器人运动状态(主要是交互力)的直接感觉程度。
该方法的核心目标是在整个步态周期内实现自然、透明的人机交互,同时精确控制交互力,使用户在操作外骨骼做康复训练/日常活动时的感觉如同控制自己的肢体一般自然。

核心创新部分:
1. 全身动力学建模
该方法首先建立了一个考虑所有链接和关节的全身动力学模型,将外骨骼视为一个整体的浮动基座系统。这个模型不仅包括外骨骼的物理参数,还考虑了人体与外骨骼之间的交互力,使得能够在没有直接力传感器的情况下,通过关节扭矩传感器等其他传感器信息间接估计交互力。

2. 交互力估计与补偿
基于上述模型,开发了一种方法来估计在单脚支撑和双脚支撑阶段的交互扭矩。

通过从关节扭矩测量值中减去重力和科里奥利力等动态效应,实时计算出人与外骨骼之间的交互力。这一估计值随后被用于闭环控制策略中,以补偿外骨骼的重力和动态力,实现精确的力控制。
3. 闭环控制策略
为了实现期望的交互力,设计了一个闭环控制策略,该策略结合了虚拟质量控制器和约束优化方案。虚拟质量控制器用于模拟期望的质量或惯性,以实现透明控制或特定的阻抗控制。约束优化方案则确保在物理和安全限制内,尽可能精确地跟踪期望的关节加速度,从而实现期望的交互力。
基于上述算法可以实现对外骨骼机器人的精确交互力控制,实现包括零力矩控制模式、指定交互力的控制模式及阻抗控制等模式,可提升外骨骼机器人对不同穿戴者需求的适应性。
【实验结果】
在实验中,WECC控制器与简化控制器以及无驱动下的模型(被动模型)进行了对比测试,以评估其在透明度和触觉渲染方面的性能表现。

其中:
-
简化控制器:将腿部建模为相互独立的双连杆链,不考虑全身动力学,未实施考虑物理限制的优化方案,直接使用简化模型作为前向模型来跟踪虚拟质量控制器发送的期望加速度指令。
-
被动模型:被动外骨骼,拆除了驱动装置,主要消除了摩擦和惯性(表观转子惯性)的主要来源,但受试者仍能感受到外骨骼的重量。
1. 触感透明度测试
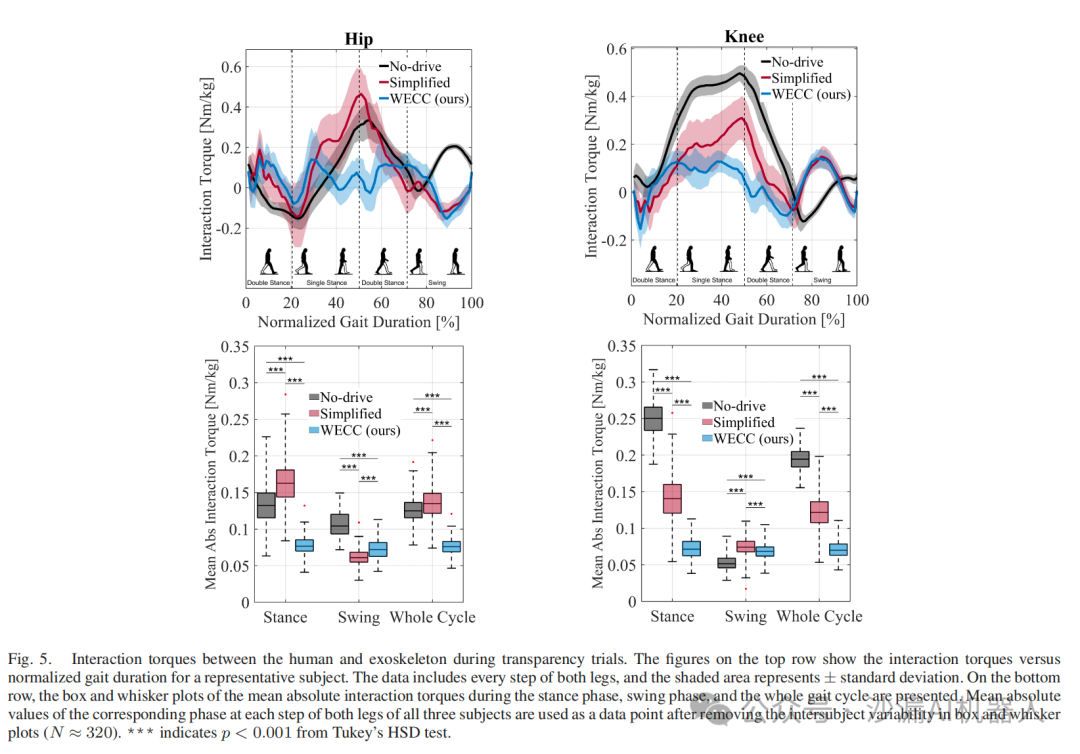
如图所示,简化控制器在摆动相与WECC表现相似,但在支撑相,髋关节和膝关节的平均绝对交互扭矩分别显著升高至0.16 Nm/kg和0.14 Nm/kg,透明度性能较差。
无驱动条件下,支撑相髋关节和膝关节的交互扭矩比WECC分别高出至少0.06 Nm/kg和0.17 Nm/kg,摆动相髋关节交互扭矩也显著高于WECC,透明度性能不佳。
2. 交互力实时控制测试
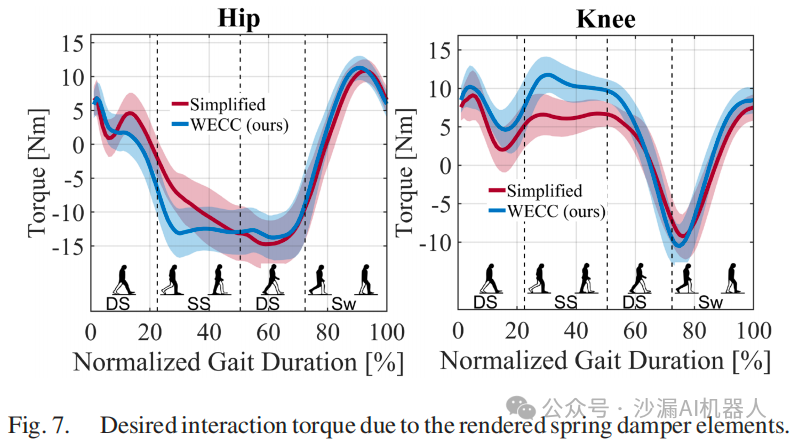
如图所示,简化控制器在单支撑相末期髋关节和膝关节的交互扭矩误差峰值较大,无法准确跟踪期望的交互扭矩。具体数值上,WECC控制器在支撑相和摆动相髋关节的平均绝对交互扭矩误差分别为0.049 Nm/kg和0.039 Nm/kg,而简化控制器在支撑相髋关节和膝关节的平均绝对交互扭矩误差显著更大。
实验视频如下: