本文介绍了 Halcon 连接相机时插件的使用。通过本套插件可连接海康
的工业相机。
**一. 环境配置
- 拷贝动态库**
在 用 户 安 装 MVS 目 录 下 按 照 如 下 路 径
Development\ThirdPartyPlatformAdapter 找到目录为 HalconHDevelop 的文
件夹,根据 Halcon 版本找到对应的 hAcqMVision.dll ,将其拷贝到相应目
录下 C:\Program Files\MVTec\HALCON-10.0\bin\x86sse2-win32,视安装目
录而定(如果是 64 位,则拷贝到 64 位对应目录)。

相机环境配置
打开 MVS,若 PC 与相机不在同一网段,则配置下 IP,设置好相机
参数。确保相机能在 MVS 上正常取流。
2. 相机连接配置
(1)驱动选择配置。打开 Halcon 菜单栏中:助手 - 打开新的 Image
Acquisition。在弹出的 Image Acquistion 对话框中,选中"图像获取接口",
在下拉框中选择"MVision"。
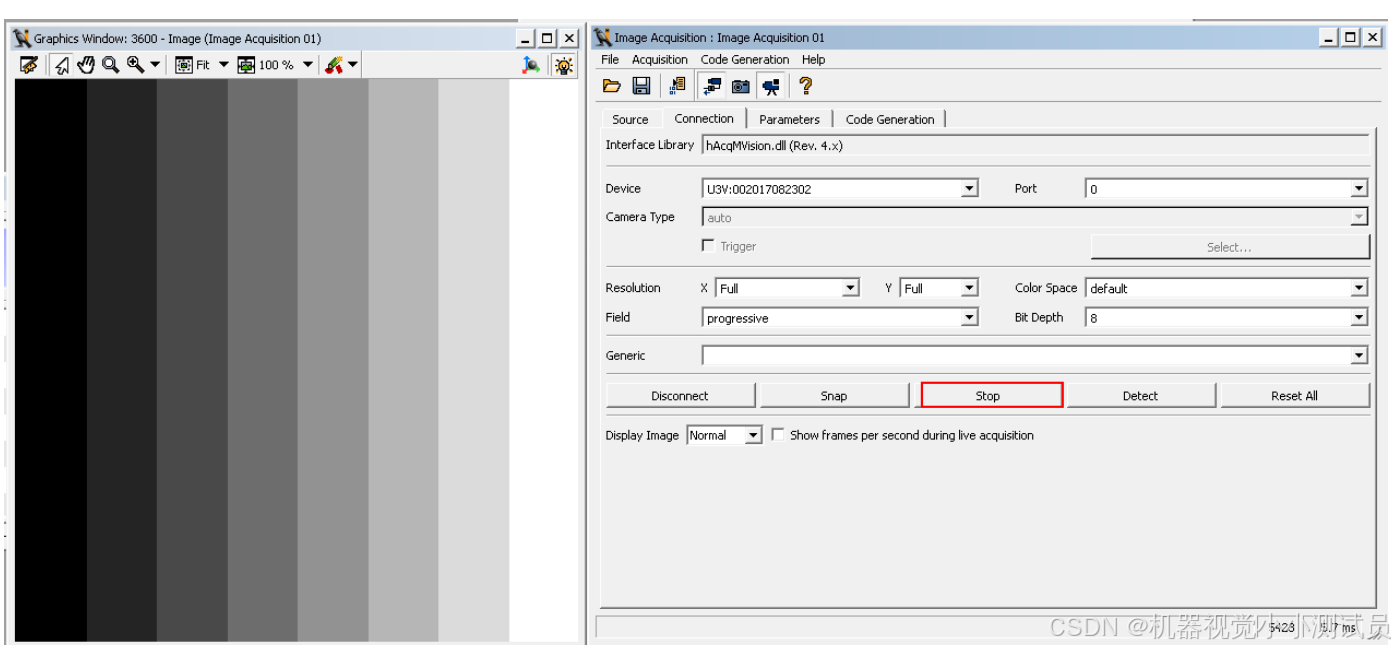
(2)设备选择配置。在 Image Acquistion 对话框中切换到"连接"的界面,然
后在设备列表中选择想要连接的设备,再点击"连接"即可。

(3)设备选择配置。 点击 Image Acquistion 对话框的"实时"按钮,进行实时
画面的播放,可以在 "图形窗口"看到画面,点击"停止"可以停止实时播放。
如果没有弹出"图形窗口"的对话框,可以在菜单栏中"可视化->打开图形窗口"
中打开图像显示对话框。

(4)参数配置。 在 Image Acquistion 对话框中可以切换到"参数"的界面,在
此界面可以对相机的常用属性参数进行设置。
3. 其他说明
(1) 该 dll 文件是可以重命名的,但是一定要保留"hAcq"的前缀。例如
重命名为 hImageAcquistion.dll,则在"图像获取接口"的下拉框中选
择名字为 ImageAcquistion 的驱动。
(2) 该插件接口支持附件一中的所有节点,附件一见本文档最后部分的表
格。
在 MVS 的安装路径 Halcon 目录下提供了 Halcon 接口取流的 Demo,
该工程为 MFC 工程,界面如下所示。