1、内容简介
matlab144-汽车abs的pid控制仿真
可以交流、咨询、答疑
2、内容说明
略
随着计算机技术、智能化信息技术和汽车动力学仿真技术的发展,相继出现了诸如制动防抱死系统(ABS)、牵引力控制系统(TCS)等车辆稳定性控制系统。这些电子控制系统显著提高了汽车的主动安全性能,系统功能的实现很大程度上依赖于车辆的加速度、车辆速度等车辆状态参数来提供车辆的各种有效信息,尤其车辆速度在系统控制上至关重要。因此,如何对车辆速度进行准确的估计对于提高汽车的稳定性和安全性非常重要。
本文以汽车ABS防抱死系统为研究对象,结合实际道路试验,根据车速估计的准确性和有效性,从自适应卡尔曼滤波算法和斜率法中选择更为准确的算法来确定ABS防抱死系统的参考车速,以方便下一步的ABS控制研究。
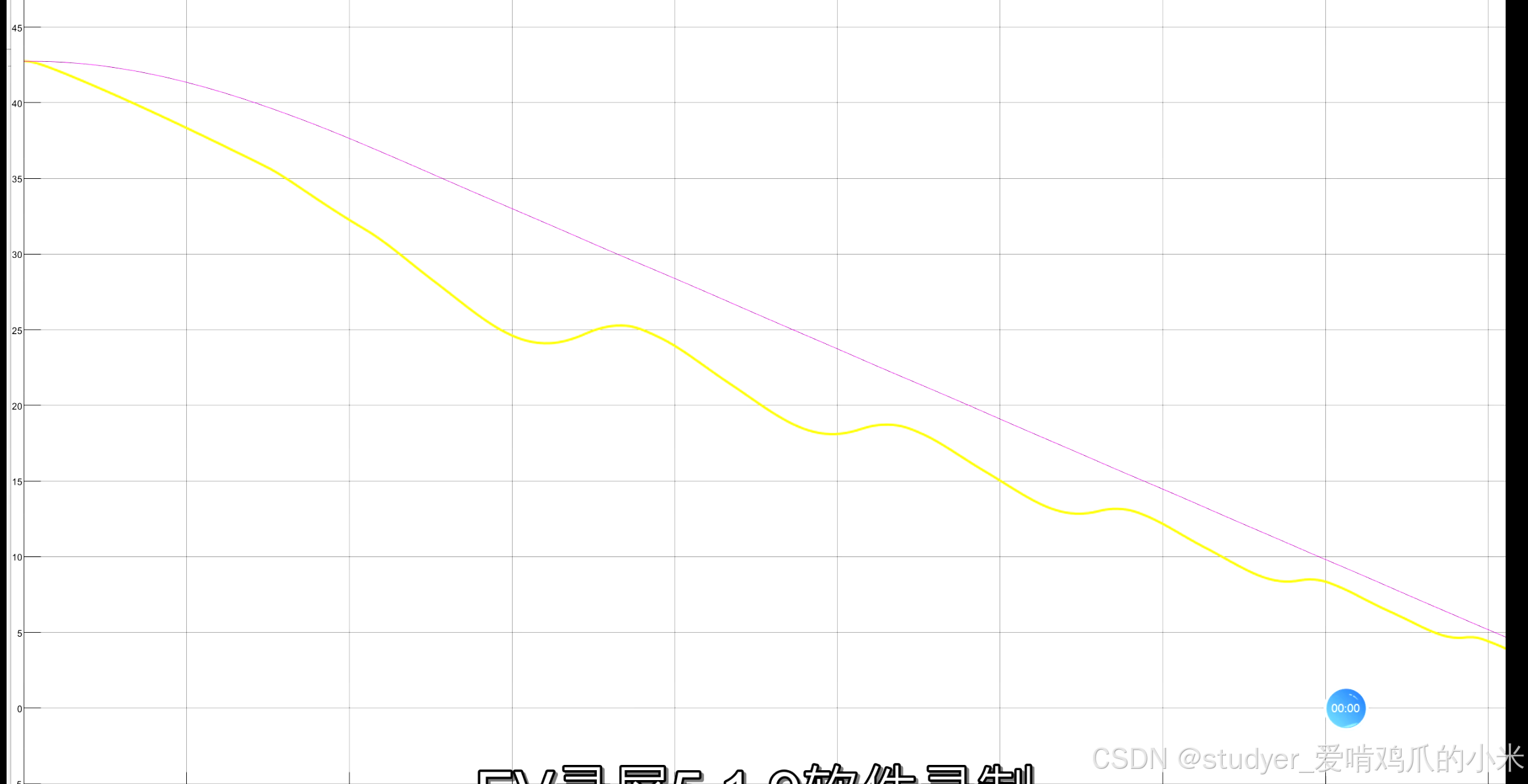
进行动力学建模,利用MATLAB/Simulink软件建立汽车ABS逻辑门限值算法控制仿真模型,分别在高附着系数路面和低附着系数路面进行仿真试验,结合道路试验数据验证所建模型是否正确并及时修正。基于模糊控制的基本理论和模糊控制器的设计方法,利用MATLAB/Simulink软件和ADAMS相关模块将建立的虚拟样机模型与汽车模糊控制器以及路面识别系统组成联合仿真系统,分别在高附着系数路面和高低附着系数对接路面上进行了直线制动仿真。对常规制动、逻辑门限值控制和模糊控制下的制动仿真结果进行横向比较,并以列表的形式对数据进行对比分析,分析两种控制法的优缺点,得出结论:模糊控制法更具有良好的鲁棒性,体现了基于滑移率的模糊控制方法相对于传统逻辑门限值控制方法的优势。
在实际道路试验的基础上,运用仿真模拟和对比分析的方法,对车辆制动试验中的车辆速度进行准确估计,以制动距离、制动减速度和滑移率等仿真结果曲线为评价标准,为新型控制算法在系统中的应用,进而提高汽车主动安全性能提供一定的参考依据。
关键词 道路试验;车速估计;模糊控制;联合仿真;对比分析

3、仿真分析
略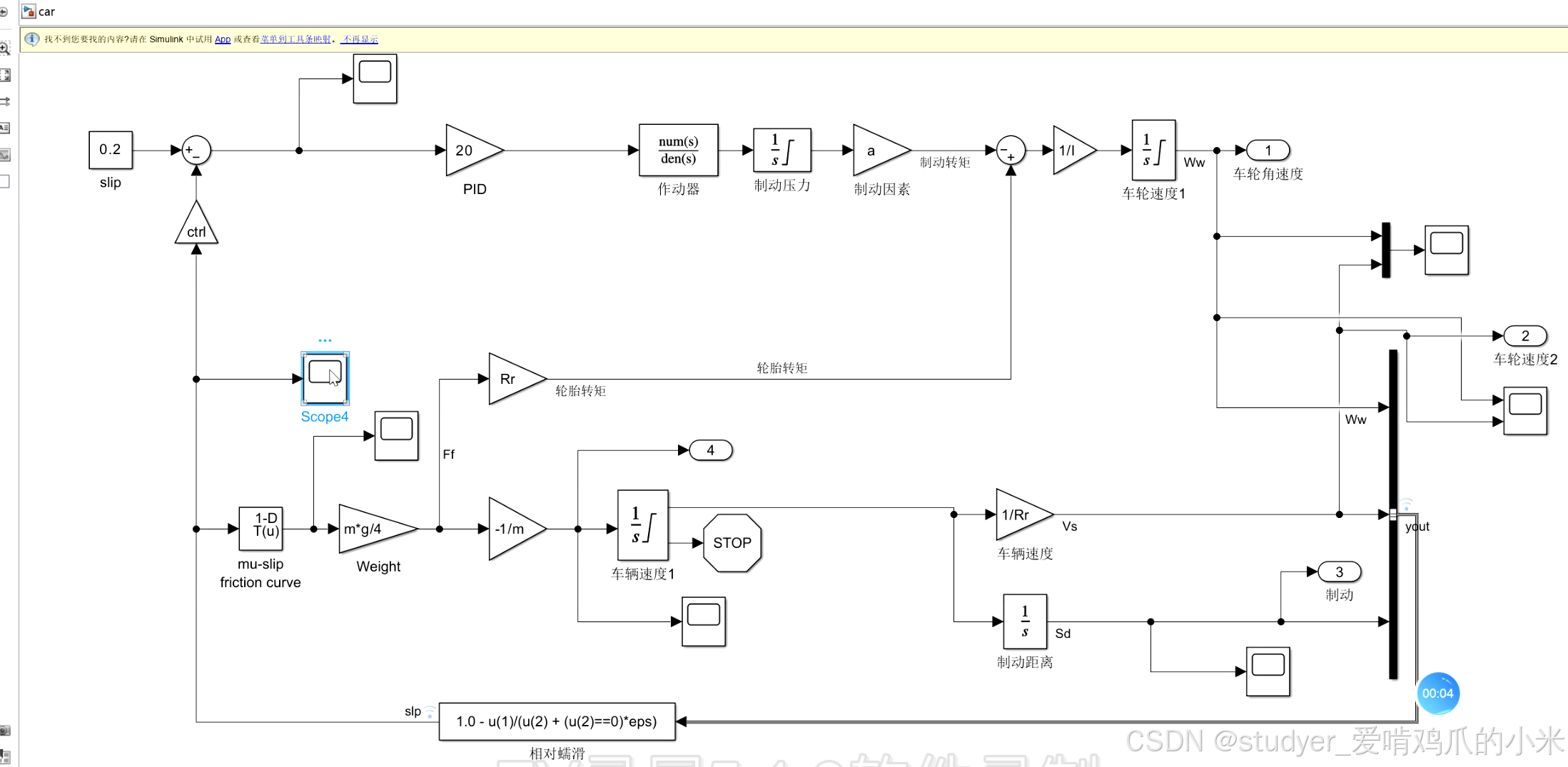
4、参考论文
略气动阀门定位器控制系统的研究_曹长刚.caj