1. 概述
本代码旨在构建一个基于 PyTorch 的神经网络模型,用于对生成的三维点云数据进行分类。通过生成数据集、数据预处理、模型训练、评估以及可视化等一系列操作,展示了一个完整的深度学习分类任务流程。最终通过绘制决策曲面和损失曲线,直观地呈现模型的性能和训练过程。
2. 依赖库导入
python
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
import torch
import torch.nn as nn
import torch.optim as optim
from sklearn.datasets import make_classification
from sklearn.model_selection import train_test_split
from sklearn.preprocessing import StandardScaler
from sklearn.metrics import accuracy_score
from matplotlib.colors import ListedColormap
from torchviz import make_dot
from matplotlib import cmnumpy:作为 Python 科学计算的基础库,提供了高效的数组操作和数值计算功能,用于处理数据的各种数学运算。matplotlib.pyplot:是 Python 中常用的绘图库,用于创建各种静态、动态和交互式可视化图表,在本代码中用于绘制损失曲线和决策曲面。Axes3D:matplotlib的一个子模块,专门用于创建三维图形,以可视化三维点云数据的决策曲面。torch:PyTorch 深度学习框架的核心库,提供了张量操作、自动求导等功能,是构建和训练神经网络的基础。torch.nn:包含了 PyTorch 中用于构建神经网络的各种模块和层,如全连接层、激活函数层、归一化层等,方便用户构建复杂的神经网络模型。torch.optim:提供了多种优化算法,如随机梯度下降(SGD)、Adam 等,用于在训练过程中更新神经网络的参数,以最小化损失函数。make_classification:sklearn库中的函数,用于生成人工合成的分类数据集,可指定样本数量、特征数量、类别数量等参数。train_test_split:用于将数据集分割为训练集和测试集,方便对模型进行训练和评估。StandardScaler:数据预处理工具,用于对数据进行标准化处理,使每个特征的均值为 0,标准差为 1,有助于提高模型的训练效果和收敛速度。accuracy_score:用于计算分类模型的准确率,衡量模型预测结果与真实标签的匹配程度。ListedColormap:matplotlib中的类,用于创建自定义颜色映射,以便在绘制决策曲面和数据点时使用不同的颜色表示不同的类别。make_dot:torchviz库中的函数,用于生成 PyTorch 模型的计算图,帮助理解模型的结构和计算流程。cm:matplotlib的颜色映射模块,提供了多种预定义的颜色映射方案,可用于可视化。
3. 生成三维散点数据
python
np.random.seed(42)
X, y = make_classification(n_samples=500, n_features=3, n_redundant=0,
n_informative=3, n_classes=3, n_clusters_per_class=1,
class_sep=1.8, random_state=42)np.random.seed(42):设置随机数种子为 42,确保每次运行代码时生成的随机数序列相同,从而使生成的数据集具有可重复性。make_classification函数的参数说明:n_samples:指定生成的样本数量为 500 个。n_features:表示每个样本的特征数量为 3 个,即生成的是三维点云数据。n_redundant:设置为 0,表示生成的数据中没有冗余特征。n_informative:设为 3,意味着有 3 个对分类有贡献的信息性特征。n_classes:指定数据的类别数量为 3 类。n_clusters_per_class:每个类别包含 1 个簇。class_sep:设置为 1.8,控制不同类别之间的分离程度,值越大,类别之间的区分越明显。random_state:同样设置为 42,进一步保证生成数据集的随机性是可复现的。
- 执行后,
X是一个形状为(500, 3)的numpy数组,存储了生成的 500 个样本的三维特征数据;y是一个形状为(500,)的numpy数组,存储了每个样本对应的类别标签(0、1 或 2)。
4. 数据预处理和转换为张量
python
scaler = StandardScaler()
X = scaler.fit_transform(X)
X_tensor = torch.FloatTensor(X)
y_tensor = torch.LongTensor(y)scaler = StandardScaler():创建一个StandardScaler对象,用于对数据进行标准化处理。X = scaler.fit_transform(X):fit方法计算数据的均值和标准差等统计信息,transform方法根据这些统计信息对原始数据X进行标准化,使得每个特征的均值为 0,标准差为 1。经过处理后,X仍然是一个形状为(500, 3)的numpy数组。X_tensor = torch.FloatTensor(X):将标准化后的numpy数组X转换为 PyTorch 的FloatTensor类型,以便输入到神经网络中进行计算。此时X_tensor的形状为(500, 3)。y_tensor = torch.LongTensor(y):将存储类别标签的numpy数组y转换为 PyTorch 的LongTensor类型,因为在分类任务中,通常使用整数类型表示类别标签。y_tensor的形状为(500,)。
5. 分割数据集
python
X_train, X_test, y_train, y_test = train_test_split(X_tensor, y_tensor, test_size=0.3, random_state=42)train_test_split函数用于将数据集分割为训练集和测试集。- 参数
X_tensor和y_tensor分别是之前转换好的输入特征张量和类别标签张量。 test_size=0.3表示将数据集的 30% 作为测试集,其余 70% 作为训练集。random_state=42再次设置随机种子,确保每次分割数据集的结果都是相同的,保证实验的可重复性。- 分割后,
X_train和y_train用于训练神经网络模型,X_test和y_test用于评估模型的性能。
6. 定义神经网络模型
python
class PointCloudClassifier(nn.Module):
def __init__(self):
super(PointCloudClassifier, self).__init__()
self.fc1 = nn.Linear(3, 64)
self.bn1 = nn.BatchNorm1d(64)
self.fc2 = nn.Linear(64, 128)
self.bn2 = nn.BatchNorm1d(128)
self.fc3 = nn.Linear(128, 64)
self.bn3 = nn.BatchNorm1d(64)
self.fc4 = nn.Linear(64, 3)
self.dropout = nn.Dropout(0.3)
self.relu = nn.ReLU()
def forward(self, x):
x = self.relu(self.bn1(self.fc1(x)))
x = self.dropout(x)
x = self.relu(self.bn2(self.fc2(x)))
x = self.dropout(x)
x = self.relu(self.bn3(self.fc3(x)))
x = self.dropout(x)
x = self.fc4(x)
return x- 定义了一个名为
PointCloudClassifier的类,继承自nn.Module,这是 PyTorch 中所有神经网络模型的基类。 __init__方法是类的构造函数,用于初始化神经网络的层和参数:self.fc1 = nn.Linear(3, 64):创建第一个全连接层,输入维度为 3(对应三维点云数据的特征数量),输出维度为 64,即该层将每个样本的 3 维特征映射到 64 维空间。self.bn1 = nn.BatchNorm1d(64):为第一个全连接层的输出添加批量归一化层,用于加速训练过程并提高模型的稳定性,归一化的维度为 64。self.fc2 = nn.Linear(64, 128):第二个全连接层,将 64 维的输入映射到 128 维空间。self.bn2 = nn.BatchNorm1d(128):对第二个全连接层的输出进行批量归一化,归一化维度为 128。self.fc3 = nn.Linear(128, 64):第三个全连接层,将 128 维的输入映射回 64 维空间。self.bn3 = nn.BatchNorm1d(64):对第三个全连接层的输出进行批量归一化,归一化维度为 64。self.fc4 = nn.Linear(64, 3):最后一个全连接层,将 64 维的输入映射到 3 维空间,对应 3 个类别,输出的结果将用于计算每个样本属于各个类别的概率。self.dropout = nn.Dropout(0.3):创建一个 Dropout 层,以 0.3 的概率随机丢弃神经元,防止模型过拟合。self.relu = nn.ReLU():创建 ReLU 激活函数层,用于引入非线性,使模型能够学习到更复杂的模式。
forward方法定义了数据在神经网络中的前向传播路径:- 输入数据
x首先经过第一个全连接层fc1,然后通过批量归一化层bn1,再经过 ReLU 激活函数,得到激活后的输出。 - 对激活后的输出应用 Dropout 层,随机丢弃部分神经元。
- 按照上述类似的方式,依次经过后续的全连接层、批量归一化层、ReLU 激活函数和 Dropout 层,直到最后一个全连接层
fc4输出最终结果。
- 输入数据
7. 初始化模型
python
model = PointCloudClassifier()
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=0.001)model = PointCloudClassifier():创建PointCloudClassifier类的实例,即初始化我们定义的神经网络模型。criterion = nn.CrossEntropyLoss():选择交叉熵损失函数作为模型的损失度量。在多分类问题中,交叉熵损失函数常用于衡量预测概率分布与真实标签之间的差异。optimizer = optim.Adam(model.parameters(), lr=0.001):使用 Adam 优化器来更新模型的参数。model.parameters()获取模型中所有需要更新的参数(权重和偏置),lr=0.001设置学习率为 0.001,控制每次参数更新的步长。
8. 训练模型
python
num_epochs = 300
train_losses = []
test_losses = []
for epoch in range(num_epochs):
model.train()
optimizer.zero_grad()
outputs = model(X_train)
loss = criterion(outputs, y_train)
loss.backward()
optimizer.step()
train_losses.append(loss.item())
model.eval()
with torch.no_grad():
test_outputs = model(X_test)
test_loss = criterion(test_outputs, y_test)
test_losses.append(test_loss.item())
if (epoch+1) % 50 == 0:
print(f'Epoch [{epoch+1}/{num_epochs}], Loss: {loss.item():.4f}, Test Loss: {test_loss.item():.4f}')num_epochs = 300:设置训练的轮数为 300 次,即让模型对整个训练集进行 300 次迭代训练。train_losses = []和test_losses = []:分别创建两个空列表,用于存储每一轮训练的训练损失和测试损失。- 在每个训练轮次中:
model.train():将模型设置为训练模式,此时 Dropout 层和批量归一化层会按照训练时的方式进行操作(如 Dropout 会随机丢弃神经元,批量归一化会根据当前批次的数据计算均值和方差)。optimizer.zero_grad():将优化器的梯度清零,因为在 PyTorch 中,梯度是累加的,每次迭代前需要将梯度设置为 0,否则会导致梯度计算错误。outputs = model(X_train):将训练集数据X_train输入到模型中,进行前向传播,得到模型的输出outputs,其形状为(训练样本数量, 类别数量),即每个样本属于各个类别的概率。loss = criterion(outputs, y_train):根据模型的输出outputs和训练集的真实标签y_train,使用交叉熵损失函数计算损失值。loss.backward():进行反向传播,计算损失函数对模型参数的梯度。optimizer.step():根据计算得到的梯度,使用 Adam 优化器更新模型的参数,以最小化损失函数。train_losses.append(loss.item()):将当前轮次的训练损失值添加到train_losses列表中。model.eval():将模型设置为评估模式,此时 Dropout 层不再随机丢弃神经元,批量归一化层使用训练时计算得到的均值和方差(而不是当前批次的数据),以确保评估结果的稳定性。with torch.no_grad():在这个代码块内,不会计算梯度,从而节省内存并加快计算速度。用于对测试集进行前向传播,得到测试集的输出test_outputs。test_loss = criterion(test_outputs, y_test):根据测试集的输出test_outputs和测试集的真实标签y_test,计算测试损失值。test_losses.append(test_loss.item()):将当前轮次的测试损失值添加到test_losses列表中。if (epoch+1) % 50 == 0::每训练 50 轮,打印当前轮次的训练损失和测试损失,以便观察模型的训练进展和性能变化。
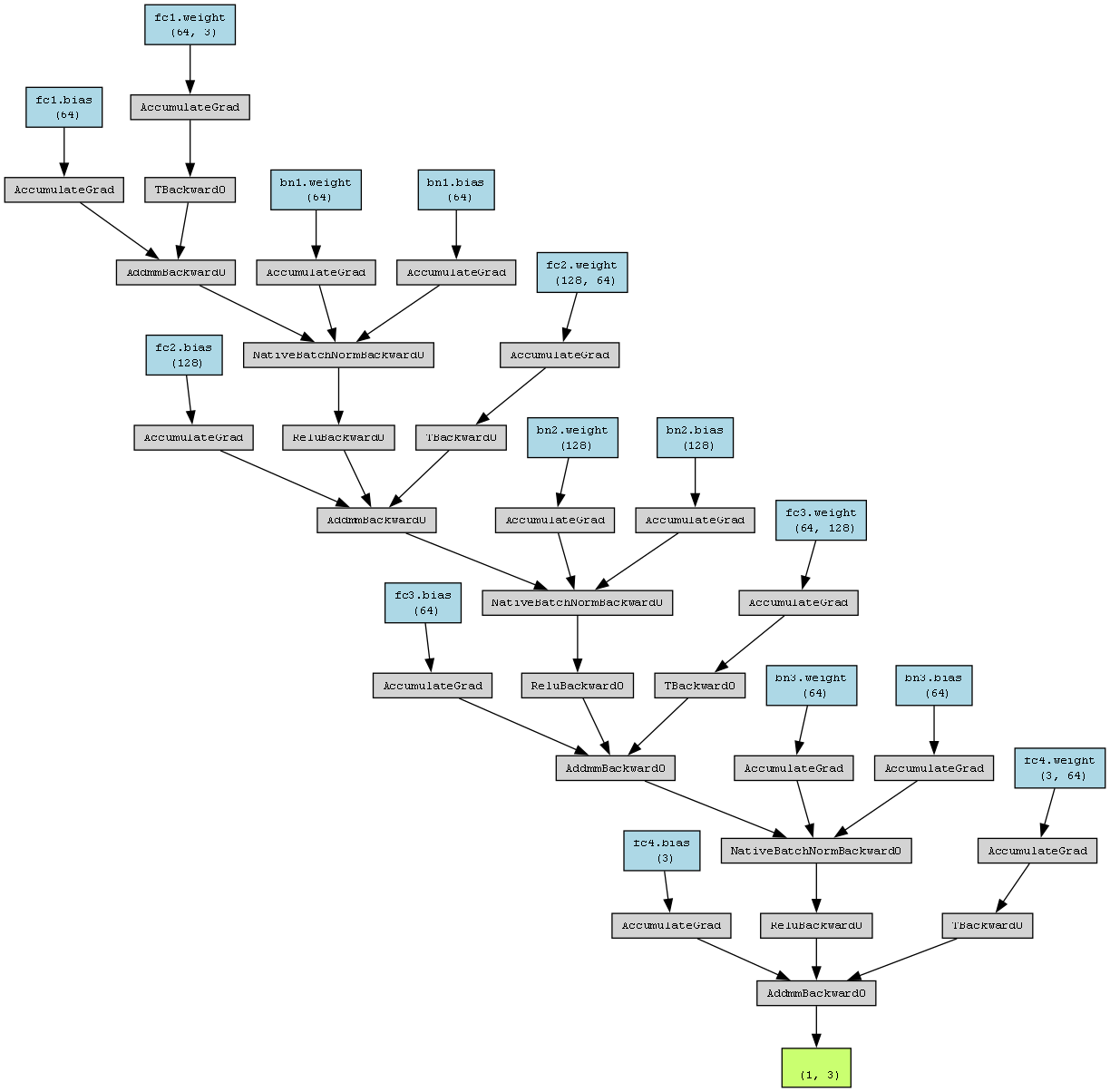
9. 生成计算图
python
dummy_input = torch.randn(1, 3)
make_dot(model(dummy_input), params=dict(model.named_parameters())).render("point_cloud_model", format="png")dummy_input = torch.randn(1, 3):创建一个形状为(1, 3)的随机张量,作为模型的虚拟输入。这里的形状(1, 3)与模型输入的维度要求一致,即一个样本的三维特征数据。make_dot(model(dummy_input), params=dict(model.named_parameters())):使用make_dot函数生成模型的计算图。model(dummy_input)将虚拟输入传入模型,得到模型的输出,params=dict(model.named_parameters())传入模型的参数,以便在计算图中显示参数信息。.render("point_cloud_model", format="png"):将生成的计算图保存为名为point_cloud_model的 PNG 格式图片,方便可视化模型的结构和计算流程。
10. 评估模型
python
model.eval()
with torch.no_grad():
train_pred = model(X_train).argmax(dim=1).numpy()
test_pred = model(X_test).argmax(dim=1).numpy()
print(f"训练集准确率: {accuracy_score(y_train.numpy(), train_pred):.4f}")
print(f"测试集准确率: {accuracy_score(y_test.numpy(), test_pred):.4f}")model.eval():将模型设置为评估模式,确保在评估过程中模型的行为是稳定的(如 Dropout 层不工作,批量归一化层使用固定的统计信息)。with torch.no_grad():在这个代码块内,不计算梯度,提高计算效率。train_pred = model(X_train).argmax(dim=1).numpy():将训练集数据X_train输入到模型中,得到模型的输出,然后使用argmax(dim=1)函数获取每个样本预测概率最大的类别索引,最后将结果转换为numpy数组,得到训练集的预测标签train_pred。test_pred = model(X_test).argmax(dim=1).numpy():对测试集数据X_test进行同样的操作,得到测试集的预测标签test_pred。
accuracy_score(y_train.numpy(), train_pred)和accuracy_score(y_test.numpy(), test_pred):分别计算训练集和测试集的准确率,即将预测标签与真实标签进行比较,计算预测正确的样本占总样本的比例。最后打印出训练集和测试集的准确率,以评估模型的性能。
11. 创建决策曲面可视化
python
def plot_decision_surface(model, X, y, feature1=0, feature2=1, fixed_value=0, title=""):
fig = plt.figure(figsize=(10, 8))计算图
完整代码
python
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
import torch
import torch.nn as nn
import torch.optim as optim
from sklearn.datasets import make_classification
from sklearn.model_selection import train_test_split
from sklearn.preprocessing import StandardScaler
from sklearn.metrics import accuracy_score
from matplotlib.colors import ListedColormap
from torchviz import make_dot
from matplotlib import cm
# 1. 生成三维散点数据
np.random.seed(42)
X, y = make_classification(n_samples=500, n_features=3, n_redundant=0,
n_informative=3, n_classes=3, n_clusters_per_class=1,
class_sep=1.8, random_state=42)
# 2. 数据预处理和转换为张量
scaler = StandardScaler()
X = scaler.fit_transform(X)
X_tensor = torch.FloatTensor(X)
y_tensor = torch.LongTensor(y)
# 3. 分割数据集
X_train, X_test, y_train, y_test = train_test_split(X_tensor, y_tensor, test_size=0.3, random_state=42)
# 4. 定义神经网络模型
class PointCloudClassifier(nn.Module):
def __init__(self):
super(PointCloudClassifier, self).__init__()
self.fc1 = nn.Linear(3, 64)
self.bn1 = nn.BatchNorm1d(64)
self.fc2 = nn.Linear(64, 128)
self.bn2 = nn.BatchNorm1d(128)
self.fc3 = nn.Linear(128, 64)
self.bn3 = nn.BatchNorm1d(64)
self.fc4 = nn.Linear(64, 3)
self.dropout = nn.Dropout(0.3)
self.relu = nn.ReLU()
def forward(self, x):
x = self.relu(self.bn1(self.fc1(x)))
x = self.dropout(x)
x = self.relu(self.bn2(self.fc2(x)))
x = self.dropout(x)
x = self.relu(self.bn3(self.fc3(x)))
x = self.dropout(x)
x = self.fc4(x)
return x
# 5. 初始化模型
model = PointCloudClassifier()
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=0.001)
# 6. 训练模型
num_epochs = 300
train_losses = []
test_losses = []
for epoch in range(num_epochs):
model.train()
optimizer.zero_grad()
outputs = model(X_train)
loss = criterion(outputs, y_train)
loss.backward()
optimizer.step()
train_losses.append(loss.item())
model.eval()
with torch.no_grad():
test_outputs = model(X_test)
test_loss = criterion(test_outputs, y_test)
test_losses.append(test_loss.item())
if (epoch+1) % 50 == 0:
print(f'Epoch [{epoch+1}/{num_epochs}], Loss: {loss.item():.4f}, Test Loss: {test_loss.item():.4f}')
# 7. 生成计算图
dummy_input = torch.randn(1, 3)
make_dot(model(dummy_input), params=dict(model.named_parameters())).render("point_cloud_model", format="png")
# 8. 评估模型
model.eval()
with torch.no_grad():
train_pred = model(X_train).argmax(dim=1).numpy()
test_pred = model(X_test).argmax(dim=1).numpy()
print(f"训练集准确率: {accuracy_score(y_train.numpy(), train_pred):.4f}")
print(f"测试集准确率: {accuracy_score(y_test.numpy(), test_pred):.4f}")
# 9. 创建决策曲面可视化
def plot_decision_surface(model, X, y, feature1=0, feature2=1, fixed_value=0, title=""):
fig = plt.figure(figsize=(10, 8))
ax = fig.add_subplot(111, projection='3d')
# 创建网格
x_min, x_max = X[:, feature1].min() - 1, X[:, feature1].max() + 1
y_min, y_max = X[:, feature2].min() - 1, X[:, feature2].max() + 1
xx, yy = np.meshgrid(np.linspace(x_min, x_max, 50),
np.linspace(y_min, y_max, 50))
# 预测每个网格点的类别
with torch.no_grad():
if feature1 == 0 and feature2 == 1:
grid_input = np.column_stack((xx.ravel(), yy.ravel(), np.full_like(xx.ravel(), fixed_value)))
elif feature1 == 0 and feature2 == 2:
grid_input = np.column_stack((xx.ravel(), np.full_like(xx.ravel(), fixed_value), yy.ravel()))
else:
grid_input = np.column_stack((np.full_like(xx.ravel(), fixed_value), xx.ravel(), yy.ravel()))
grid_tensor = torch.FloatTensor(grid_input)
Z = model(grid_tensor).argmax(dim=1).numpy()
Z = Z.reshape(xx.shape)
# 绘制曲面
surf = ax.plot_surface(xx, yy, Z, cmap=ListedColormap(['#FF0000', '#00FF00', '#0000FF']),
alpha=0.3, antialiased=True)
# 绘制原始数据点
scatter = ax.scatter(X[:, feature1], X[:, feature2], X[:, 3 - feature1 - feature2],
c=y, cmap=ListedColormap(['#FF0000', '#00FF00', '#0000FF']),
s=40, edgecolors='k')
ax.set_title(title)
ax.set_xlabel(f'Feature {feature1+1}')
ax.set_ylabel(f'Feature {feature2+1}')
ax.set_zlabel(f'Feature {3 - feature1 - feature2+1}')
plt.colorbar(surf, ax=ax, shrink=0.5, aspect=5)
plt.show()
# 10. 绘制三个不同视角的决策曲面
plot_decision_surface(model, X, y, feature1=0, feature2=1, fixed_value=0, title="Decision Surface (Fixed Feature 3=0)")
plot_decision_surface(model, X, y, feature1=0, feature2=2, fixed_value=0, title="Decision Surface (Fixed Feature 2=0)")
plot_decision_surface(model, X, y, feature1=1, feature2=2, fixed_value=0, title="Decision Surface (Fixed Feature 1=0)")
# 11. 可视化训练过程
plt.figure(figsize=(10, 5))
plt.plot(train_losses, label='Training Loss')
plt.plot(test_losses, label='Test Loss')
plt.title('Training and Test Loss Over Epochs')
plt.xlabel('Epoch')
plt.ylabel('Loss')
plt.legend()
plt.show()