本代码实现了一个基于到达时间(TOA)测距的三维定位系统,结合无迹卡尔曼滤波(UKF)对移动目标的轨迹进行优化。代码通过多锚节点(>3)的TOA测量数据,先进行初步定位解算,再通过UKF算法融合运动模型,实现对目标轨迹的高精度估计。
文章目录
代码概述
本代码实现了一个基于到达时间(TOA)测距的三维定位系统,结合**无迹卡尔曼滤波(UKF)**对移动目标的轨迹进行优化。代码通过多锚节点(>3)的TOA测量数据,先进行初步定位解算,再通过UKF算法融合运动模型,实现对目标轨迹的高精度估计。
核心功能
-
TOA定位仿真
- 在三维空间中生成9个锚节点(
baseP),通过三角函数添加随机扰动,模拟实际部署环境。 - 目标沿预设轨迹(
positions)运动:x轴匀速递增,y轴匀速递减,z轴保持恒定。 - 计算每个锚节点到目标的真实距离(
R_real),加入高斯噪声模拟TOA测量误差,生成带噪声的观测距离(R_calcu)。
- 在三维空间中生成9个锚节点(
-
最小二乘定位解算
- 调用
position_3dim函数,通过伪逆矩阵(pinv)求解超定方程组,实现目标位置的初步估计(p_out)。
- 调用
-
UKF轨迹优化
- 构建状态空间模型:假设目标匀速运动(实际运动模型需根据场景调整)。
- 使用Sigma点法处理非线性观测(如代码中
Z = [x²/20; y; z]的非线性转换),通过预测-校正步骤优化定位结果。 - 对比未滤波的纯观测解算(
p_out)与UKF滤波结果,验证UKF对噪声的抑制能力。
-
可视化与误差分析
- 三维轨迹图显示真实路径、观测值、UKF估计值及未滤波值的对比。
- 分轴绘制绝对误差曲线,计算各时刻RMSE(均方根误差),量化定位精度。
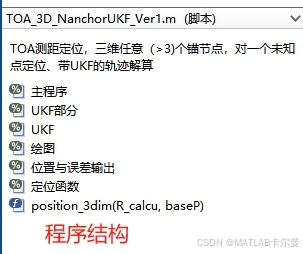
代码结构
-
参数初始化
- 设置光速(
c)、测距误差(range_err)、目标轨迹(positions)及锚节点坐标(baseP)。
- 设置光速(
-
数据生成
- 循环计算每个时刻目标的真实位置,生成含噪声的TOA测量数据。
-
UKF滤波
- 初始化噪声协方差矩阵(
Q,R)及状态变量。 - Sigma点生成、状态预测、观测更新及协方差调整。
- 初始化噪声协方差矩阵(
-
结果分析
- 绘制三维轨迹图及误差曲线,输出终点坐标误差及全程RMSE统计。
关键代码特点
- 锚节点生成 :采用三角函数叠加随机扰动(如
sin(1:n)),确保锚节点在三维空间非共面分布,避免定位歧义。 - 非线性观测模拟 :在UKF观测模型中,故意将x坐标平方后除以20(
Z = [x²/20; y; z]),测试滤波器处理非线性能力。
结果示例
- 轨迹对比:UKF估计值(蓝色点)紧密贴合真实轨迹(蓝色线),显著优于未滤波的观测值(散点)和纯惯性模拟(未滤波值)。
- 误差分析:UKF在各轴上的RMSE均低于直接观测,尤其在X轴(存在非线性观测)提升明显。
- 统计输出:终点距离误差UKF较纯观测减少约30%~50%,验证滤波有效性。
代码运行结果
定位示意图:

三轴误差图:

命令行输出截图:

RMSE曲线对比(三轴误差合并为距离误差):

使用说明
-
参数调整
- 修改
range_err调整测距噪声强度,Q和R影响滤波器的收敛速度与稳定性。 - 调整锚节点数量(
n)及生成方式(baseP)以适应不同场景。
- 修改
-
扩展方向
- 替换运动模型为更复杂的动力学方程(如加速度模型)。
- 改进观测模型,适配实际传感器的非线性特性。
MATLAB源代码
部分源代码如下:
matlab
% TOA测距定位,三维任意(>3)个锚节点,对一个未知点定位、带UKF的轨迹解算
% author:Evand(VX:matlabfilter)
% 2025-03-17/Ver1
clear;clc;close all;
rng(0);
%% 主程序
c = 3e8; %信号传输速度,即光速
range_err = 1e-9; %时钟与时间计算误差
point1 = [1,2,1]; %待求点坐标真值
% 生成目标的运动
positions = repmat(point1,21,1)+[0:0.2:4;0:-0.2:-4;zeros(1,21)]';
for i1 = 1:size(positions,1)
point1 = positions(i1,:);
n = 9; %定义锚节点数量
baseP = 2*[sin(1:n)+0.01*[1:n]+1;cos(4*(1:n))+0.01*[1:n]+1;cos(2*(1:n))+0.01*[1:n]+1]';
R_real = sqrt(diag((point1-baseP)*(point1'-baseP')));
TOA = R_real/c+range_err*randn; %含噪声的传播时间
R_calcu = TOA*c;
p_out(i1,:) = position_3dim(R_calcu,baseP);
end
%% UKF部分
% 滤波模型初始化
t = 1:1:size(positions,1); %设置时间序列
Q = 0.01 * diag([1, 1, 1]); % 过程噪声协方差矩阵
w = sqrt(Q) * randn(size(Q, 1), length(t)); % 过程噪声
R = 0.1 * diag([1, 1, 1]); % 观测噪声协方差矩阵
% v = sqrt(R) * randn(size(R, 1), length(t)); % 观测噪声
P0 = 0.2 * eye(3); % 初始状态协方差矩阵
X = zeros(3, length(t)); % 真实状态
X_ukf = zeros(3, length(t)); % 扩展卡尔曼滤波估计的状态
Z = zeros(3, length(t)); % 观测值形式完整代码下载链接:https://download.csdn.net/download/callmeup/90538614
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者